

Расчет механических характеристик двигателей постоянного тока независимого и параллельного возбуждения
Расчет естественной механической характеристики
Механическая характеристика двигателя постоянного тока параллельного (независимого) возбуждения описывается уравнением
![]() , (2.1)
, (2.1)
где Uном – номинальное напряжение якорной цепи двигателя, В;
![]() полное сопротивление
якорной цепи двигателя, приведенное к
рабочей температуре, Ом;
полное сопротивление
якорной цепи двигателя, приведенное к
рабочей температуре, Ом;
k – конструктивная постоянная машины;
Фном – номинальный магнитный поток машины, Вб.
Полное сопротивление
якорной цепи двигателя
![]() ,
Ом, можно определить по выражению
,
Ом, можно определить по выражению
![]() , (2.2)
, (2.2)
где Rя – сопротивление обмотки якоря двигателя. Ом;
Rк.о. – сопротивление компенсационной обмотки, Ом;
Rд.п. – сопротивление обмотки дополнительных полюсов, Ом.
В справочниках по электрическим машинам приводятся обмоточные данные (Rя, Rк.о., Rд.п.), но не на все типы двигателей. Достаточно точно полное сопротивление якорной цепи двигателя , Ом, можно определить по приближенной формуле
![]() ,
(2.3)
,
(2.3)
где Rном – номинальное сопротивление двигателя, Ом;
ном – номинальный КПД двигателя.
Номинальное сопротивление двигателя – это такое сопротивление, при котором пусковой ток двигателя равен номинальному току якоря. Номинальное сопротивление двигателя Rном, Ом, может быть определено по
![]() , (2.4)
, (2.4)
где Iя.ном – номинальный ток якоря, А.
Номинальный ток якоря Iя.ном, А, определяется из выражения
![]() (2.5)
(2.5)
где 0,045 – коэффициент, учитывающий потери мощности на возбуждение для двигателя параллельного возбуждения.
Полное сопротивление якорной цепи двигателя, приведенное к рабочей температуре рассчитывают по (1.5), приняв r1= .
Для определения произведения конструктивной постоянной машины на номинальный магнитный поток kФном можно воспользоваться уравнением ЭДС двигателя
![]() (2.6)
(2.6)
Откуда kФном. Вс
![]() (2.7)
(2.7)
Механическая характеристика двигателя постоянного тока параллельного (независимого) возбуждения строится без учета влияния реакции якоря и представляет собой прямую линию. Поэтому строится она по двум точкам:
номинального режима работы с координатами Мном и ном;
идеального холостого хода с координатами М=0 и =0.
Скорость идеального холостого хода 0, радс-1, определяется по (2.1)при М=0, т.е.
![]() (2.8)
(2.8)
По результатам расчета строится естественная механическая характеристика (рисунок 7).
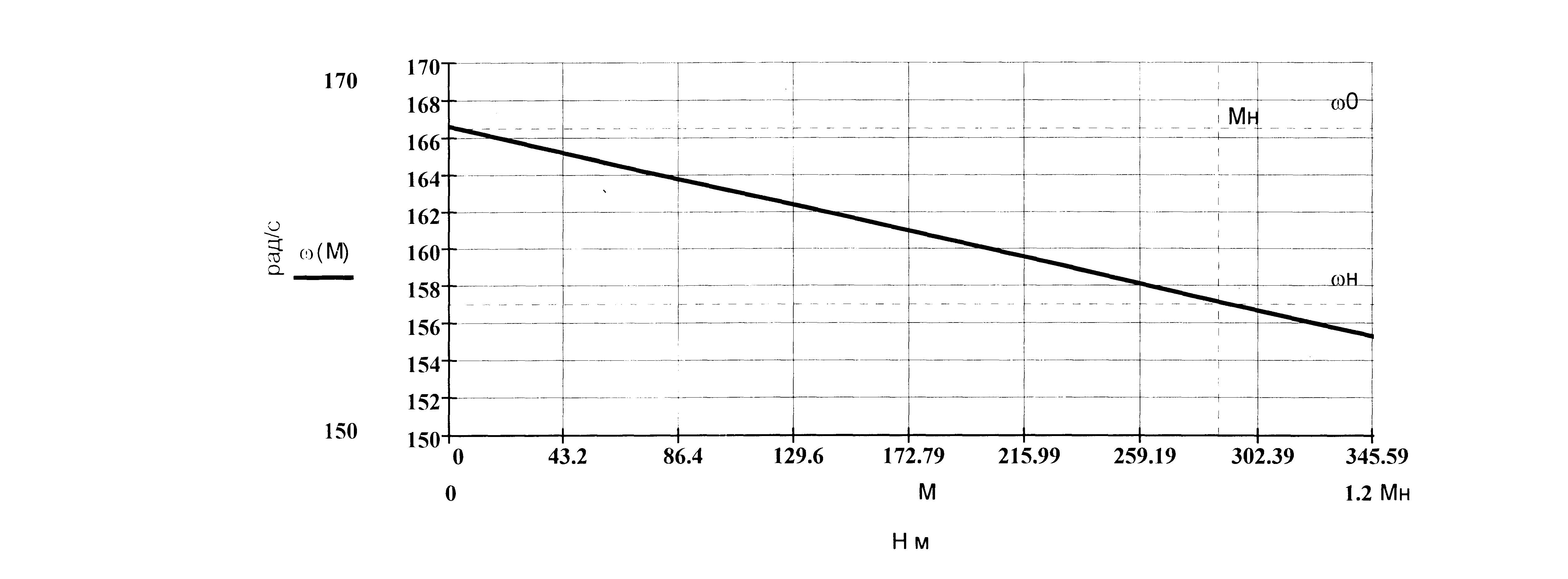
Рисунок 7-Естественная механическая характеристика двигателя 2ПХХХ
Расчет механических характеристик двигателя независимого возбуждения
при регулировании скорости изменением напряжения якорной цепи
Для построения искусственной характеристики, обеспечивающей получение пониженной скорости, необходимо найти величину напряжения, обеспечивающую заданную скорость при данной нагрузке.
Обычно задается величина пониженной скорости как
![]() , (2.9)
, (2.9)
где с – коэффициент снижения скорости с ном до пон.
Тогда уравнение скоростной характеристики примет вид
![]() , (2.10)
, (2.10)
где Uпон – пониженное напряжение на якоре двигателя, необходимое для получения заданной скорости, В;
Ic – ток якоря при нагрузке, А.
Пониженное напряжение Uпон, В, обеспечивающее работу привода с заданной нагрузкой при ,определяется
![]() (2.11)
(2.11)
Искусственная характеристика также строится по двум, точкам только точка идеального холостого хода 0пон, радс-1, определяется как
![]() (2.12)
(2.12)
Значение скорости пон, радс-1, при номинальной нагрузке определяется
![]() (2.13)
(2.13)
Для регулируемого привода рассчитывают две крайние характеристики диапазона регулирования скорости и одну-две промежуточные характеристики.
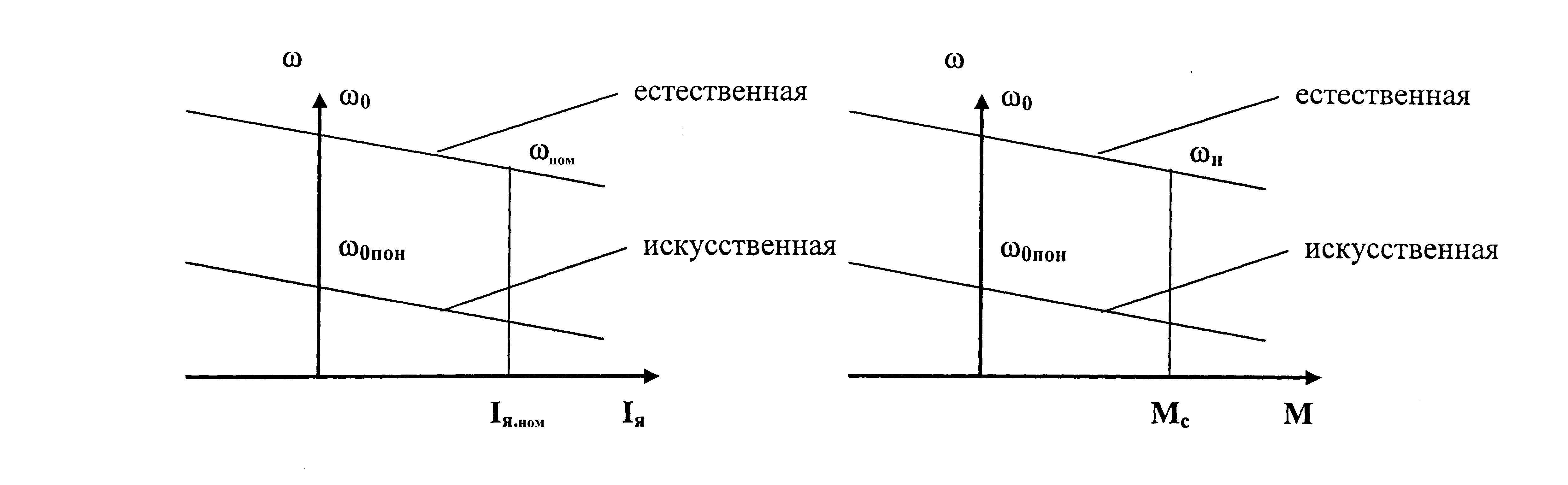
Рисунок 8-Семейство скоростных и механических характеристик двигателя
СПИСОК ЛИТЕРАТУРЫ
Вешеневский С.Н. Характеристики двигателей в электроприводе. – М.: Энергия, 1977.
Чиликин М.Г., Сандлер А.С. Общий курс электропривода, - М.: Энергоиздат, 1981.
Гейлер Л.Б. Основы электропривода. – Мн.: Вышэйшая школа, 1972.