

Министерство образования Республики Беларусь
Учреждение образования
«Бобруйский государственный механико-технологический техникум»
УТВЕРЖДЕНО
Зам. директора по УР
______________Н. И. Селютина
«____»________________2007г.
Методические указания по расчету механических характеристик двигателей учебное пособие для курсового и дипломного проектирования
Дисциплина ЭЛЕКТРООБОРУДОВАНИЕ ПРЕДПРИЯТИЙ И ГРАЖДАНСКИХ ЗДАНИЙ
Специальность 2-36 03 31 Монтаж и эксплуатация электрооборудования.
РАЗРАБОТАЛИ О.С.Кед
А.Д.Савицкий
Ф.И.О. преподавателя
Рассмотрено на заседании цикловой комиссии
Протокол №_____
От «_____»___________2007г
Председатель цикловой комиссии __________________________________________
СОДЕРЖАНИЕ
1 Расчет механических характеристик асинхронных двигателей 2
1.1 Расчет механических характеристик асинхронных двигателей
с фазным ротором 2
1.2 Расчет естественной механической характеристики асинхронного
двигателя с короткозамкнутым ротором 10
1.3 Расчет механических характеристик асинхронного двигателя
с короткозамкнутым ротором при регулировании скорости
изменением частоты питающего напряжения 11
2 Расчет механических характеристик двигателей постоянного тока
независимого и параллельного возбуждения 13
2.1 Расчет естественной механической характеристики 13
2.2 Расчет механических характеристик двигателя независимого
возбуждения при регулировании скорости изменением напряжения
якорной цепи 14
Список литературы 16
1 Расчет механических характеристик асинхронных двигателей
Расчет механических характеристик асинхронных двигателей с фазным
ротором
Механическая характеристика n2=f(M) представляет собой зависимость частоты вращения ротора n2 от момента двигателя М. Частота вращения ротора n2, мин-1, прямо пропорциональна скольжению ротора s и связана с ним следующим образом
![]() , (1.1)
, (1.1)
где n0 – частота вращения магнитного поля статора, мин-1;
s – скольжение ротора в относительных единицах.
На практике можно пользоваться зависимостью вида s=f(M).
Исходными данными для расчета механических характеристик асинхронного двигателя с фазным ротором (АДФ) являются:
тип двигателя;
максимальный момент двигателя Ммакс, Нм;
активное сопротивление фазы обмотки статора, приведенное к рабочей температуре при данном классе нагревостойкости изоляции,
 ,
Ом;
,
Ом;реактивное сопротивление фазы обмотки статора х1, Ом;
активное сопротивление фазы обмотки ротора, приведенное к обмотке статора и рабочей температуре при данном классе нагревостойкости изоляции,
 ,
Ом;
,
Ом;реактивное сопротивление фазы обмотки ротора, приведенное к обмотке статора,
 ,
Ом.
,
Ом.
Расчет механической характеристики АДФ производится по уточненной формуле Клосса
 , (1.2)
, (1.2)
где Мi – текущее значение момента двигателя, Нм;
q – вспомогательный параметр;
si – текущее значение скольжения ротора;
sк – критическое скольжение ротора.
Величина вспомогательного параметра q определяется из выражения
 , (1.3)
, (1.3)
Критическое скольжение sк рассчитывается по
![]() (1.4)
(1.4)
Расчет ведется в следующей последовательности:
определяется активное сопротивление обмотки фазы статора, приведенное к рабочей температуре , Ом
![]() , (1.5)
, (1.5)
где r1 – активное сопротивление обмотки фазы статора при температуре 20С, Ом;
температурный коэффициент увеличения сопротивления, принимаемый для меди и алюминия равным 0,004град-1;
tраб –расчетная рабочая температура обмотки статора при данном классе нагревостойкости изоляции двигателя, град. Принимается для классов нагревостойкости изоляции А, Е, В равной 75С, классов F, Н 115С;
определяется активное сопротивление обмотки фазы ротора, приведенное к рабочей температуре
 ,
Ом, по (1.5) при r1=r2,
где r2
– активное сопротивление обмотки фазы
ротора при температуре 20С,
Ом;
,
Ом, по (1.5) при r1=r2,
где r2
– активное сопротивление обмотки фазы
ротора при температуре 20С,
Ом;определяется активное сопротивление обмотки фазы ротора, приведенное к обмотке статора , Ом
![]() , (1.6)
, (1.6)
где kr – коэффициент приведения сопротивлений;
определяется критическое скольжение sк по (1.4);
определяется вспомогательный параметр q по (1.3);
задаются рядом скольжений si от 0 до 2 и по (1.2) рассчитывают соответствующий им момент Мi
результаты расчета заносят в таблицу по форме таблицы 1.
Таблица 1 – Естественная механическая характеристика двигателя ХХХ.
-
s
M, Нм
n, мин-1
ХХХ – тип выбранного двигателя, частоту вращения n определяют по (1.1).
Число расчетных точек принимают 3550, причем в области критического скольжения sк шаг необходимо уменьшить, чтобы получить большую точность в этой области механической характеристики.
По полученным данным строится механическая характеристика n=f(M) или s=f(M) (рисунок 1) в масштабе, удобном для дальнейших графических построений.
После построения естественной механической характеристики приступают к расчету и построению реостатных механических характеристик.
По принятой схеме управления определяют число ступеней пускового реостата. Предварительно рассчитывают пиковый момент М1 и момент переключения М2, Нм. исходя из следующих условий
М1=(0,70,8)Ммакс, (1.7)
М2≥1,2Мс.макс, (1.8)
где Мс.макс – максимальный момент сопротивления, Нм.
Далее через точки a и b, соответствующие моментам М1и М2 естественной механической характеристики, проводят луч до пересечения с прямой s=0 и получают точку t – начало пусковой диаграммы. Далее строятся лучи с соблюдением равенства пиковых и переключающих моментов на всех ступенях. В случае, если равенство моментов не соблюдается (рисунок 2), необходимо изменить моменты М1 и М2 и повторить разбивку до получения нужного результата (рисунок 3). Для обеспечения надежного разгона привода должно выполняться условие
![]() (1.9)
(1.9)
где Мп.ср – средний пусковой момент двигателя, Нм.
По построенным характеристикам на рисунке 3 определяют сопротивления ступеней пускового реостата при температуре 20С rR1, rR2, rR3, rR4, Ом,
 (1.10)
(1.10)
где ef, de, cd, ac – длины соответствующих отрезков, мм.
По току роторной
цепи и рассчитанным значениям сопротивлений
выбирают ящики сопротивлений, схемы
включения ящиков для получения требуемых
величин сопротивлений ступеней. Выбранные
действительные сопротивления
![]() ,
Ом, приводят к рабочей температуре по
(1.5) при =0,0002град-1
и по (1.6) к цепи ротора. С учетом приведенного
активного сопротивления обмотки фазы
ротора определяют полные приведенные
сопротивления линий ротора
,
Ом, приводят к рабочей температуре по
(1.5) при =0,0002град-1
и по (1.6) к цепи ротора. С учетом приведенного
активного сопротивления обмотки фазы
ротора определяют полные приведенные
сопротивления линий ротора
![]() ,
Ом
,
Ом
![]() (1.11)
(1.11)
Расчет реостатных характеристик производится по (1.2) – (1.4) с введением вместо приведенного активного сопротивления обмотки фазы ротора полного приведенного сопротивления линии ротора на соответствующей ступени . По результатам расчетов строится пусковая диаграмма (рисунок 4).
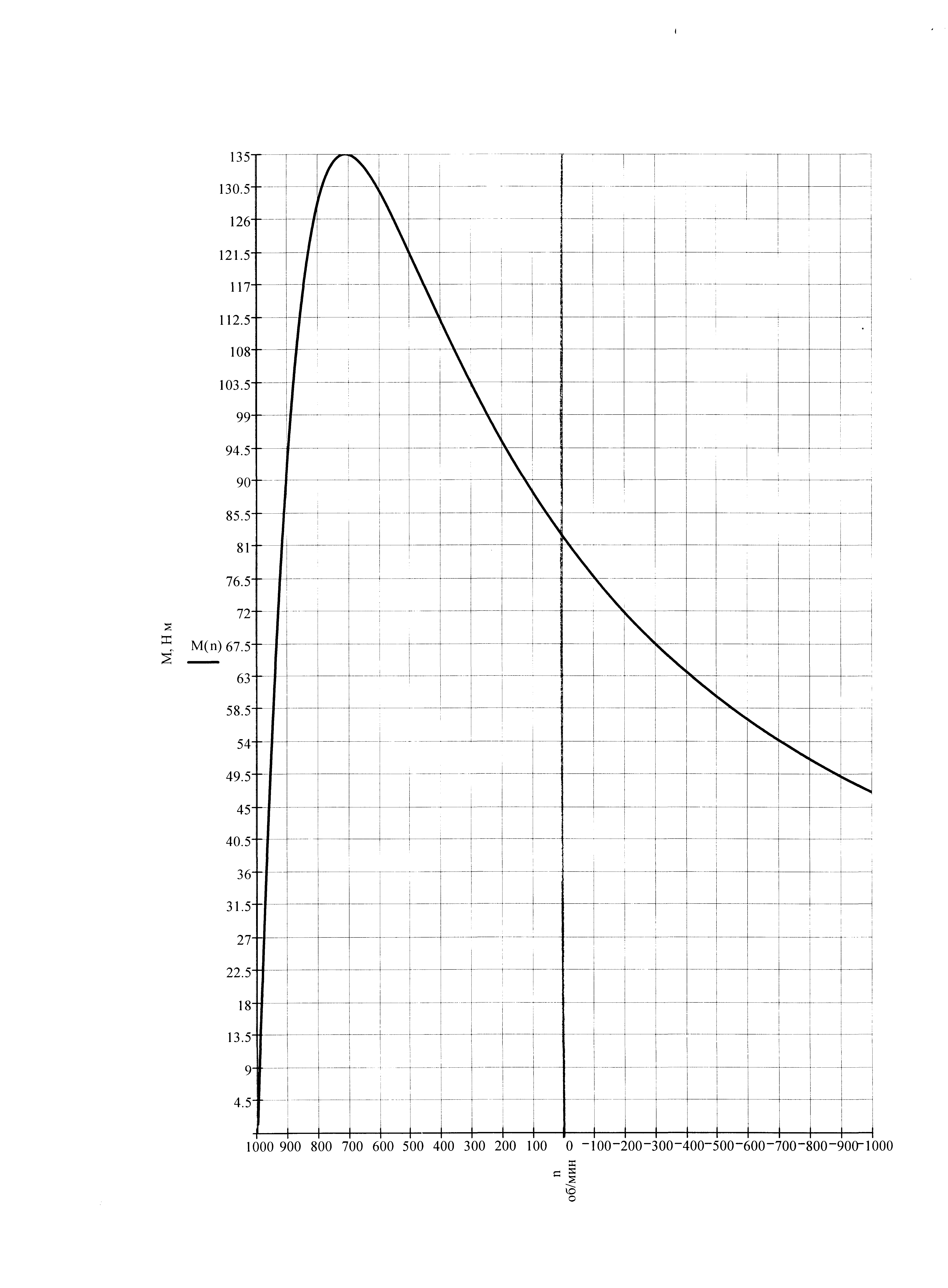
Рисунок 1-Естественная механическая характеристика двигателя ХХХ
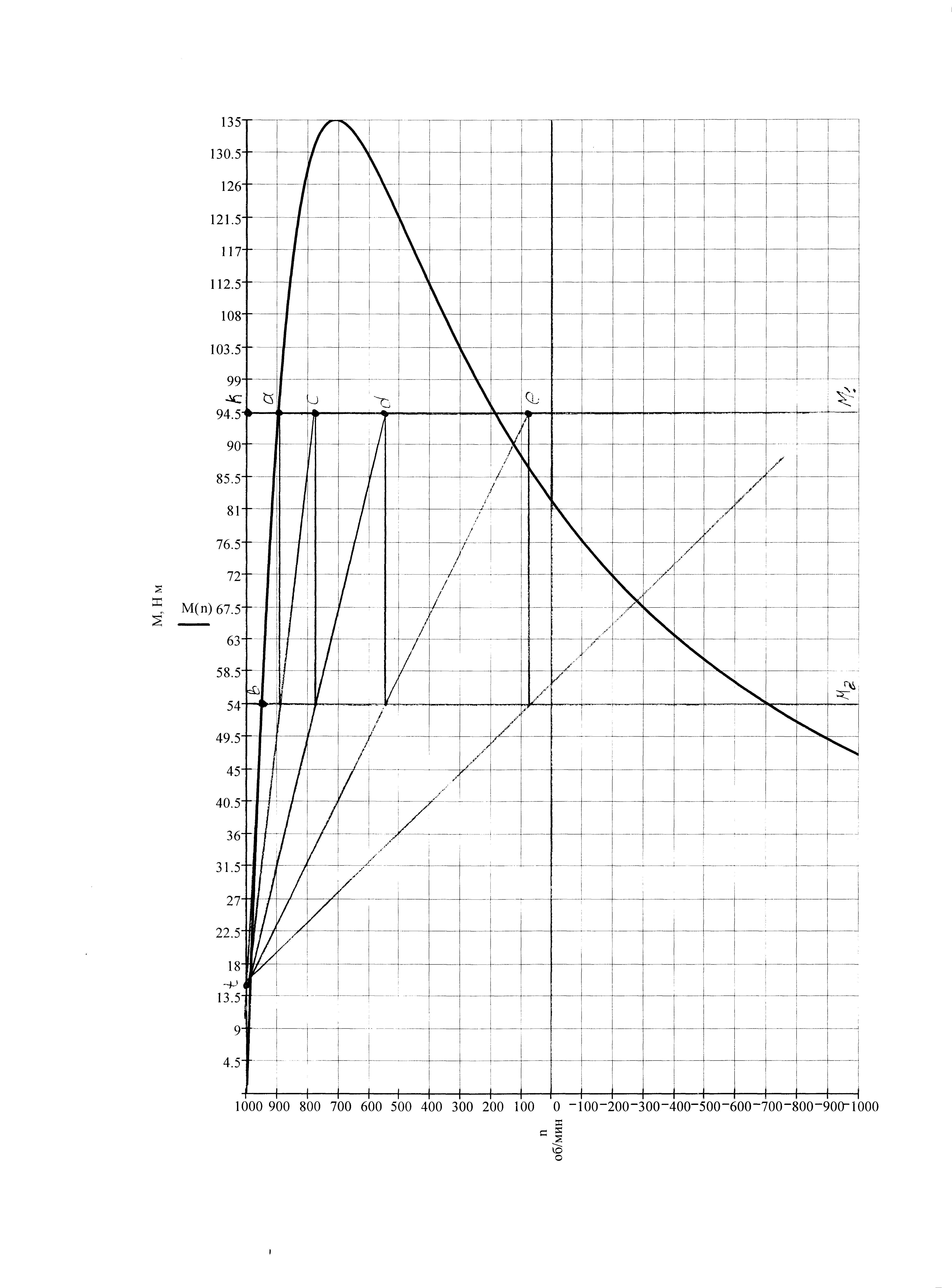
Рисунок 2- Начальная разбивка по ступеням
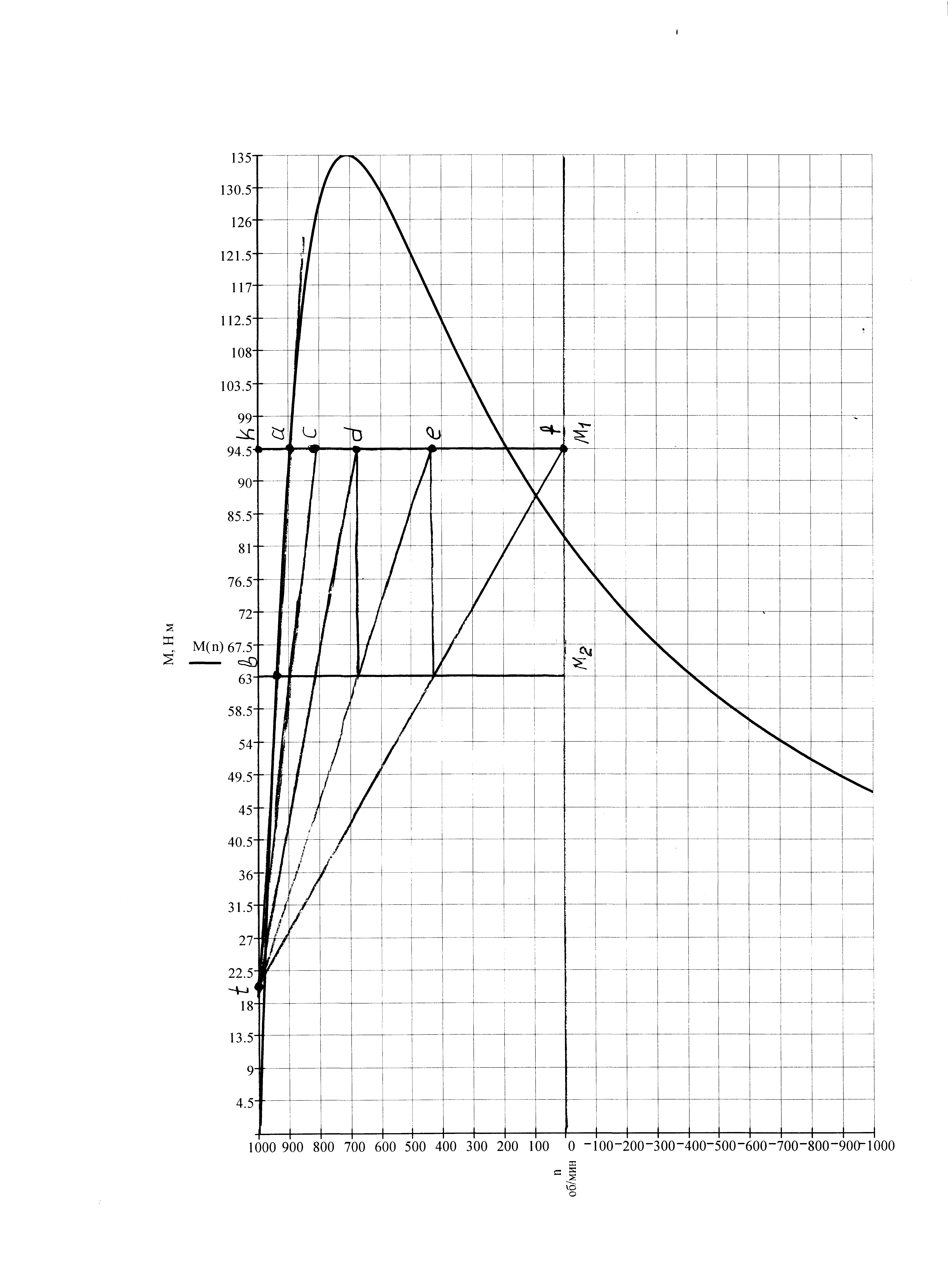
Рисунок 3-Окончательная разбивка по ступеням
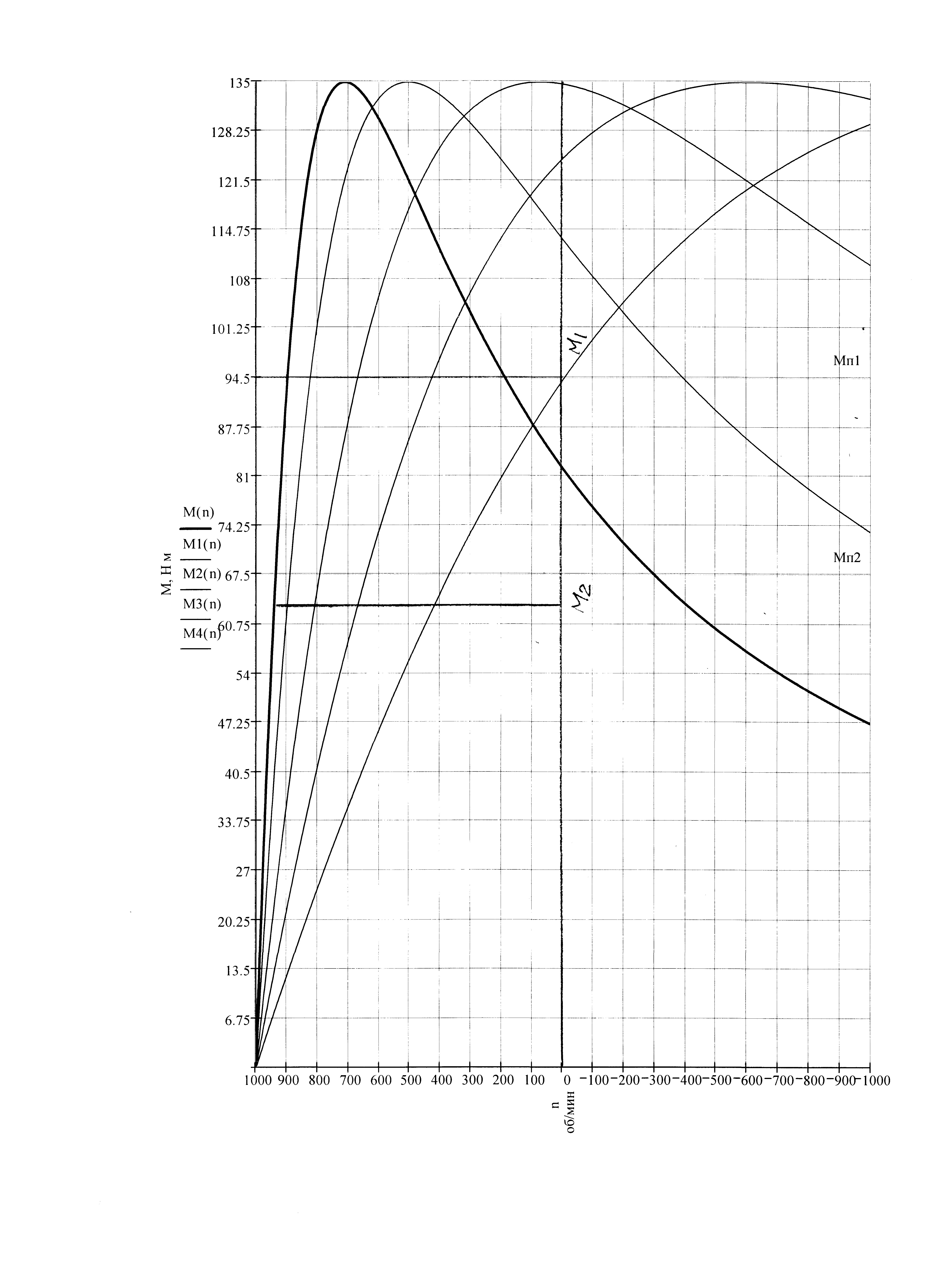
Рисунок 4-Пусковая диаграмма двигателя ХХХ с четырьмя ступенями пускового реостата
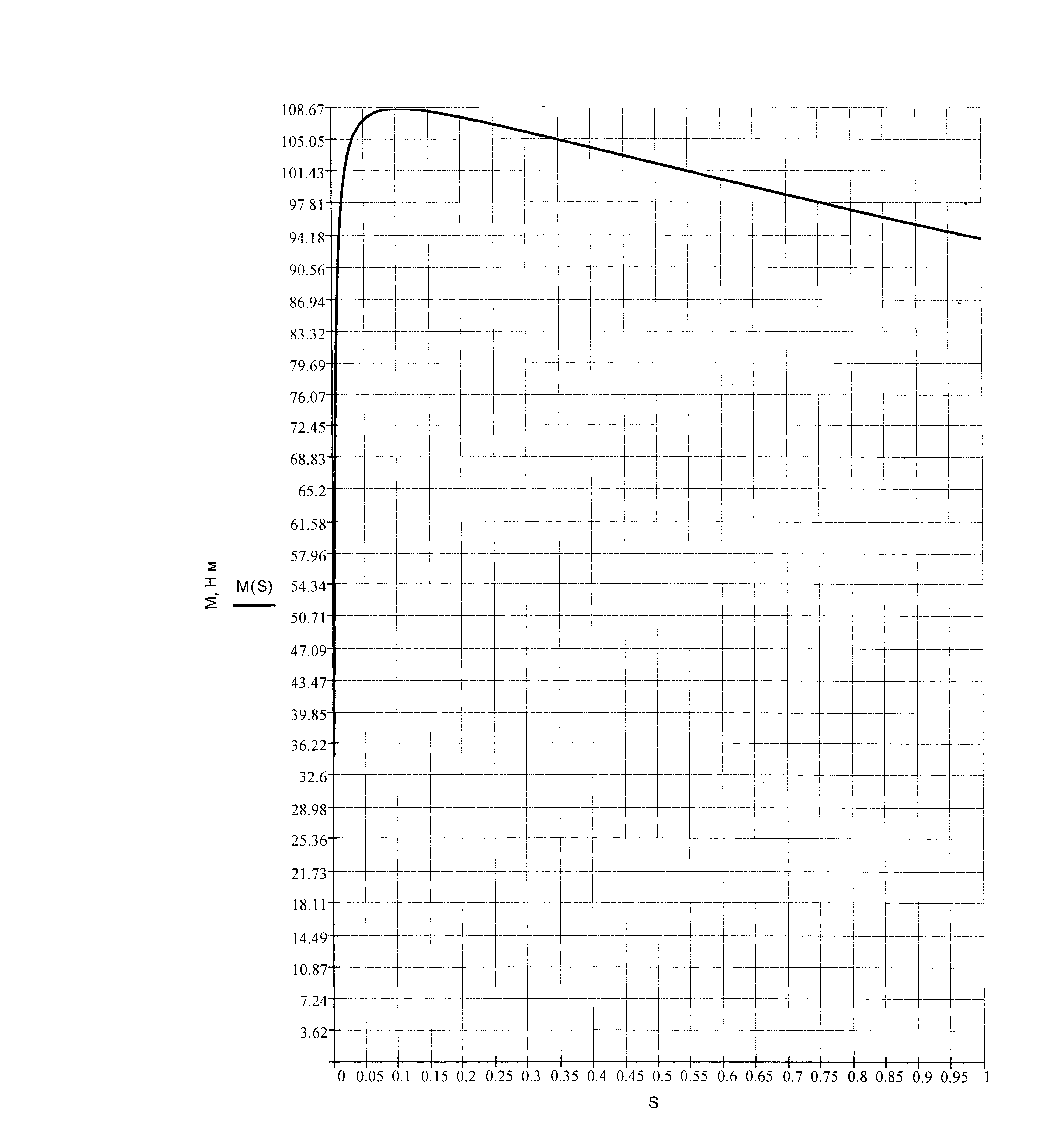
Рисунок 5-Естественная механическая характеристика асинхронного двигателя 4АХХХ с короткозамкнутым ротором