

Контрольные вопросы
1. Объясните устройство и принцип действия трехфазного асинхронного двигателя с фазным ротором.
2. Объясните возникновение вращающегося магнитного поля в трехфазной машине.
3. Опишите, какие процессы происходят в трехфазном асинхронном двигателе с короткозамкнутым ротором и объясните, почему скорость вращения ротора всегда меньше частоты вращения магнитного поля.
4. Объясните возникновение вращающегося магнитного поля в двухфазной машине.
Тема 3 Устройство и принцип действия см
3.1 Устройство СМ
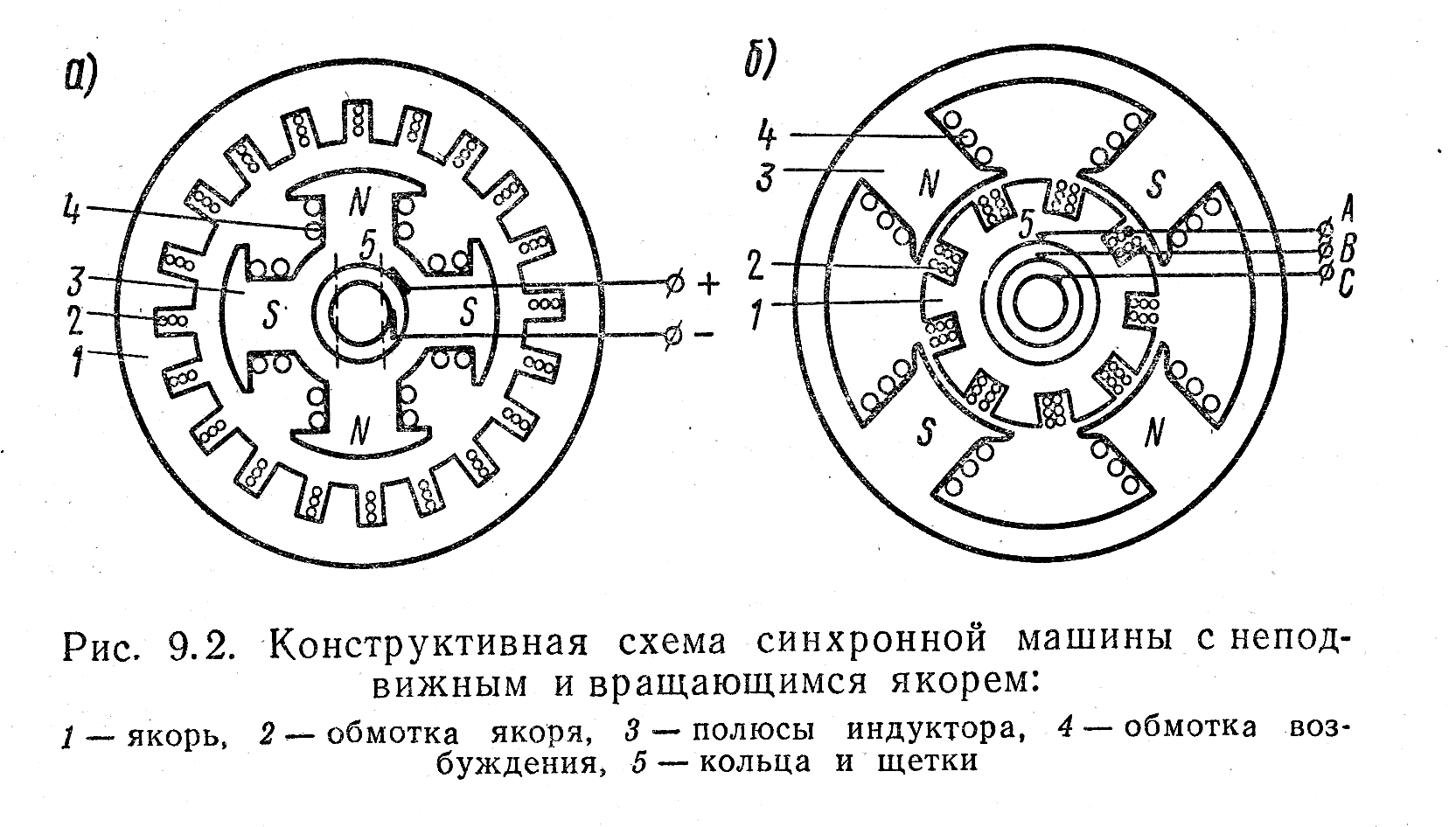
Статор СМ устроен так же, как и АМ. Обмотка статора называется еще обмоткой якоря. Ротор СМ имеет обмотку возбуждения, питаемую через 2 контактных кольца и щетки постоянным током от постороннего источника. Часто этим источником является маломощный Г=Т, устанавливаемый на валу этой же СМ. Назначение ОВ - создание в машине первичного магнитного поля.
 Роторы
СМ бывают явнополюсные
(т.е. их магнитные полюсы конструктивно
выражены явно)
и неявнополюсные
(рисунок
). Сердечники полюсов набираются из
листовой электротехнической стали. В
полюсах СД (синхронных двигателей)
делают пазы, в которые укладываются
стержни пусковой обмотки, выполненной
из материала с высоким удельным
сопротивлением (латунь, ...). Торцы этих
стержней объединяются короткозамыкающие
кольца (аналог "беличьей клетки"
АМ). Иногда полюсы делают не шихтованными,
а цельными, и тогда роль пусковой обмотки
выполняют сами массивные полюсы, имеющие
в этом случае электрическую проводимость
в осевом и радиальном направлениях.
Роторы
СМ бывают явнополюсные
(т.е. их магнитные полюсы конструктивно
выражены явно)
и неявнополюсные
(рисунок
). Сердечники полюсов набираются из
листовой электротехнической стали. В
полюсах СД (синхронных двигателей)
делают пазы, в которые укладываются
стержни пусковой обмотки, выполненной
из материала с высоким удельным
сопротивлением (латунь, ...). Торцы этих
стержней объединяются короткозамыкающие
кольца (аналог "беличьей клетки"
АМ). Иногда полюсы делают не шихтованными,
а цельными, и тогда роль пусковой обмотки
выполняют сами массивные полюсы, имеющие
в этом случае электрическую проводимость
в осевом и радиальном направлениях.
Маломощные СМ иногда имеют обращенную конструкцию (индукторы (полюсы) располагают на статоре, а обмотки якоря размещают на вращающемся роторе (рис. ). В таком случае электрическая связь с этой обмоткой осуществляется через 3 контактных кольца (аналог коллектора ЭМ=Т) со щетками.
Неявнополюсное исполнение ротора СМ используется в крупногабаритных машинах при больших скоростях вращения (соображения механической прочности ротора и крепления его полюсов и обмоток возбуждения).
3.2 Принцип действия СМ
Если ротор СМ привести во вращение со скоростью n об/сек и возбудить его (подать через контактные кольца ток в его обмотку), созданный этим током поток возбуждения Ф будет пересекать проводники обмотки статора, и в фразах последней будет индуцироваться ЭДС электромагнитной индукции с частотой
![]() .
.
При подключении к обмотке статора нагрузки по ней потечет ток – машина работает в режиме генератора.
Протекание
переменных токов в трехфазной обмотке
статора вызывает появление в СМ
вращающегося магнитного поля, как и у
АМ. Это поле статора вращается в
направлении вращения ротора со скоростью
![]() ,
т.е. n1=n
(скорость
вращения поля статора равна скорости
вращения ротора).
,
т.е. n1=n
(скорость
вращения поля статора равна скорости
вращения ротора).
Если, наоборот, подвести к обмотке статора трехфазный переменный ток, то в результате взаимодействия полей ротора и статора поле статора увлекает за собой ротор.
Тема 4. Механическая характеристика и регулирование скорости вращения асинхронных машин.
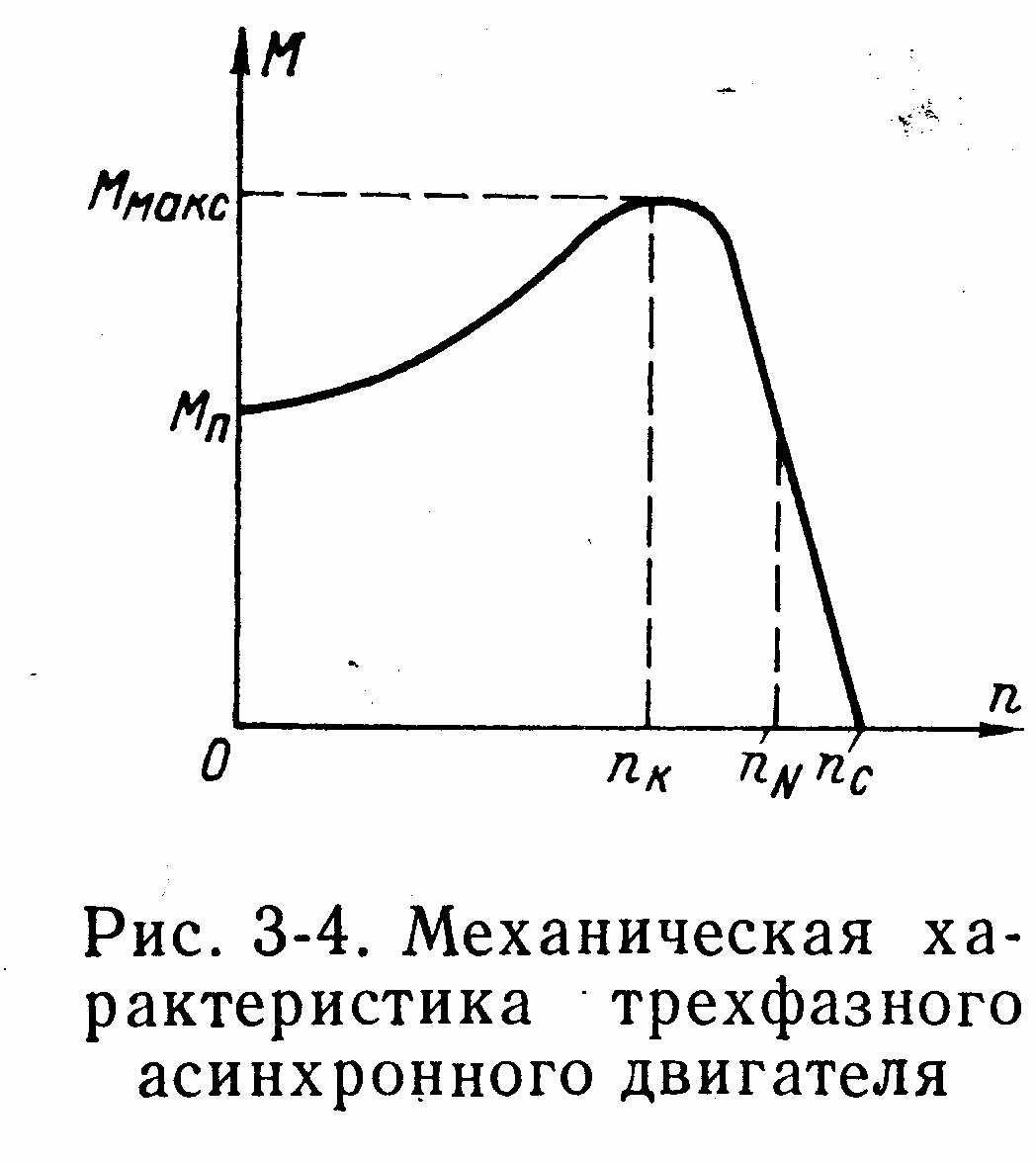
4.1 Механическая характеристика (МХ)
МХ - это
зависимость скорости вращения ротора
n
от развиваемого момента на валу (![]() )
при постоянном напряжении и частоте
питающей обмотки статора сети ( U1=const
и f1=const).
Часто эту зависимость представляют
как M=f(S)
(рисунок ). На МХ можно отметить ряд
характерных точек: пусковой момент Мп,
скорость идеального ХХ (синхронная
скорость nc
, номинальная скорость nн,
максимальный развиваемый АД момент.
)
при постоянном напряжении и частоте
питающей обмотки статора сети ( U1=const
и f1=const).
Часто эту зависимость представляют
как M=f(S)
(рисунок ). На МХ можно отметить ряд
характерных точек: пусковой момент Мп,
скорость идеального ХХ (синхронная
скорость nc
, номинальная скорость nн,
максимальный развиваемый АД момент.
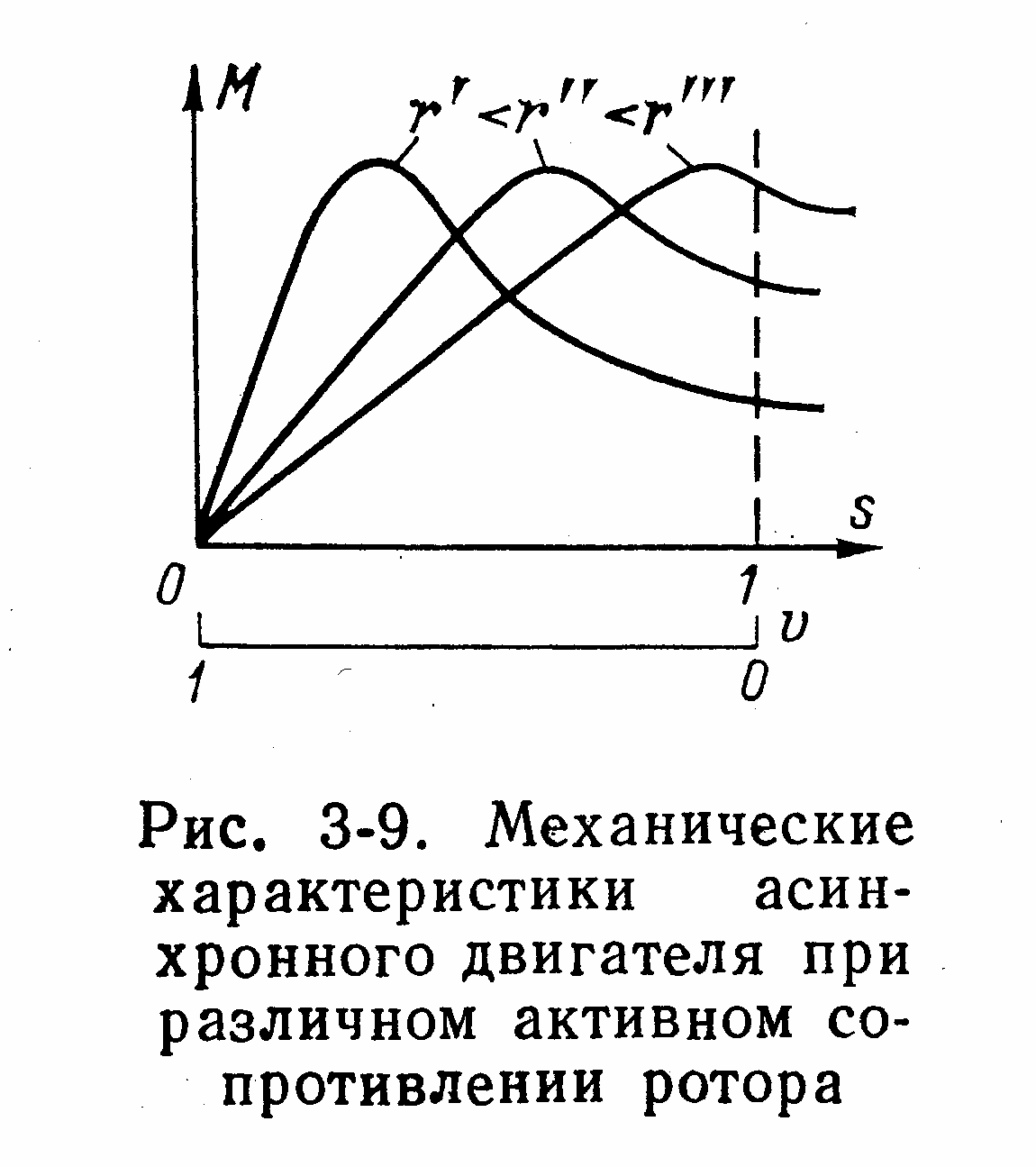 Для
АД с фазным ротором можно построить
семейство реостатных
МХ
при различных сопротивлениях в цепи
фаз ротора (см. рисунок ).
Для
АД с фазным ротором можно построить
семейство реостатных
МХ
при различных сопротивлениях в цепи
фаз ротора (см. рисунок ).
4.2 Пуск АД
При пуске АД должны удовлетворяться следующие основные требования (как и при пуске Д=Т):
а) движущий момент, развиваемый АД при пуске (пусковой момент Мп), должен превышать тормозящий момент Мв, создаваемый механической нагрузкой на его валу: Мп > Мв;
б) величина пускового тока должна быть ограничена;
в) схема пуска должна быть максимально простой.
Основные способы пуска АД:
- прямой пуск (подключение обмотки статора непосредственно с сети);
- пуск при пониженном напряжении на статоре;
- пуск при помощи пускового реостата в цепи ротора (возможен только в машинах с фазным ротором, имеющим электрическую связь с неподвижной "внешней средой" через контактные кольца).
Первый способ применяется обычно при пуске АД малой мощности с КЗ ротором. При проектировании таких АД учитывают условие б). Увеличение скорости ротора n происходит по естественной механической характеристике от точки П (пуск) до точки Р (рабочий режим).
 К
недостаткам такого способа относится
малая величина Мп,
а также наличие броска тока при пуске
-
К
недостаткам такого способа относится
малая величина Мп,
а также наличие броска тока при пуске
-
![]() в 5 – 7 раз превышает номинальный ток
Iн.
в 5 – 7 раз превышает номинальный ток
Iн.
Второй способ применяется при пуске на холостом ходу, т.е. при малом моменте нагрузки Мв, поскольку при снижении U1 в k раз момент Мп падает в k2 раз. При этом способе применяются различные схемы:
- реакторный пуск (включение на время пуска в цепь статора реактивных сопротивлений, на которых падает часть питающего напряжения сети);
- включение на период пуска активных сопротивлений в цепь статора (идея аналогична предыдущему пункту);
- автотрансформаторный пуск (статор получает питающее напряжение от регулируемого трехфазного автотрансформатора);
- переключением обмоток статора со "звезды" на время пуска в "треугольник" после разгона.
Третий
способ используется при пуске АД с
фазным ротором.
Как видно из рисунка , при некотором
значении добавочного сопротивления
![]() в цепи ротора можно производить пуск
при
в цепи ротора можно производить пуск
при
![]() ,
а по мере разгона постепенно или
ступенями, как на рисунке, уменьшать
это сопротивление до нруля.
,
а по мере разгона постепенно или
ступенями, как на рисунке, уменьшать
это сопротивление до нруля.
Несмотря на большие возможности этого способа, он требует более сложной конструкции ротора, и АД с фазным ротором обладают более высокой стоимостью. Поэтому такой способ используется при тяжелых условиях пуска, где требуется развить максимально возможный пусковой момент.
4.3 КЗ АД с повышенным пусковым М
Для повышения пускового момента АД применяются две конструктивные разновидности КЗ роторов:
а) АД с двойной беличьей клеткой;
б) АД с ротором, имеющим глубокие пазы.
Разновидность а) имеет 2 "беличьи клетки" на роторе: наружную и внутреннюю. Наружная выполняет роль пусковой обмотки, она выполнена из относительно тонких стержней и имеет повышенное активное сопротивление. Внутренняя – рабочая, ее стержни имеют большее сечение и обладают меньшим сопротивлением.
Индуктивное же сопротивление ХLП пусковой обмотки мало, так как она лежит практически на поверхности якоря, и потокосцепление ее с полем рассеяния мало. Напротив, индуктивная составляющая ХLР полного сопротивления рабочей обмотки велика, поскольку она расположена в толще ферромагнетика и пронизывается полным магнитным потоком.
При пуске частота тока в роторе f2 , велика (f2 = f1), и ХLП << ХLР, полное сопротивление ZП много меньше ZР, а его активная составляющая много больше индуктивной. При этом большая часть тока якоря АД будет протекать по наружной (пусковой) обмотке, и в этом токе активная составляющая много больше реактивной. А поскольку вращающий момент в АД создается именно активной составляющей тока ротора (см. п. 6.3.2), пусковой момент достигает значительной величины.
 По
мере разгона ротора частота тока f2
уменьшается,
поэтому изменяется и распределение
токов между клетками: реактивные
сопротивления уменьшаются и становятся
незначительными по сравнению с активными,
ток переходит в рабочую клетку, поскольку
Rp
<< Rп.
По
мере разгона ротора частота тока f2
уменьшается,
поэтому изменяется и распределение
токов между клетками: реактивные
сопротивления уменьшаются и становятся
незначительными по сравнению с активными,
ток переходит в рабочую клетку, поскольку
Rp
<< Rп.
 Глубокопазный
двигатель
– его принцип действия основан также
на
вытеснении тока при пуске.
Стержни беличьей клетки занимают объем
пазов большой глубины (рисунок ), и
наружные слои стержней играют роль
наружной клетки (пусковой обмотки) в
предыдущей конструкции, а внутренние,
глубинные – роль внутренней (рабочей)
обмотки. Так же, как и в варианте с двойной
"беличьей клеткой", при разных
скоростях ротора n
изменяется соотношение
между активной и реактивной составляющими
полного комплексного сопротивления
обмотки, за счет чего ее сопротивление
при пуске (МХ 2 на рисунке и в рабочем
режиме МХ 1) различны.
Глубокопазный
двигатель
– его принцип действия основан также
на
вытеснении тока при пуске.
Стержни беличьей клетки занимают объем
пазов большой глубины (рисунок ), и
наружные слои стержней играют роль
наружной клетки (пусковой обмотки) в
предыдущей конструкции, а внутренние,
глубинные – роль внутренней (рабочей)
обмотки. Так же, как и в варианте с двойной
"беличьей клеткой", при разных
скоростях ротора n
изменяется соотношение
между активной и реактивной составляющими
полного комплексного сопротивления
обмотки, за счет чего ее сопротивление
при пуске (МХ 2 на рисунке и в рабочем
режиме МХ 1) различны.
4.4 Регулирование скорости вращения АД
Частота вращения ротора АД определяется формулой
n = n1(1 - S) = f1(1-S)/p,
где р – число пар полюсов обмотки статора. Отсюда вытекают три принципиально возможных метода регулирования скорости АД:
- изменение частоты f1;
- изменение числа пар полюсов р;
- изменение скольжения S.
4.4.1 Частотное регулирование
Используется для управления АД с КЗ ротором. Требует наличия источника электрического тока переменной частоты, в качестве которого могут быть использованы, например, синхронный генератор переменного тока с переменной скоростью вращения; преобразователи частоты (электромагнитные или полупроводниковые).
 Развиваемый
АД Ммакс
пропорционален (U1/f1)2,
поэтому для поддержания неизменной
т.н. перегрузочной
способности
двигателя, т.е. отношения Ммакс/Мв,
необходимо при
изменении частоты
f1
одновременно изменять и напряжение
питания статора
U1
так, чтобы отношение U1/f1
=
const,
если момент нагрузки на валу
Мв
не
зависит от скорости вращения
n,
или по
другим законам,
определяемым зависимостью Мв=f(n).
Развиваемый
АД Ммакс
пропорционален (U1/f1)2,
поэтому для поддержания неизменной
т.н. перегрузочной
способности
двигателя, т.е. отношения Ммакс/Мв,
необходимо при
изменении частоты
f1
одновременно изменять и напряжение
питания статора
U1
так, чтобы отношение U1/f1
=
const,
если момент нагрузки на валу
Мв
не
зависит от скорости вращения
n,
или по
другим законам,
определяемым зависимостью Мв=f(n).
4.4.2 Изменение числа пар полюсов.
Такое регулирование дает возможность получить ступенчатое изменение частоты вращения. АД, реализующие такую возможность управления, называются многоскоростными. Существуют два способа организации такого управления скоростью:
- в пазах статора АД укладываются несколько обмоток, имеющих разное число пар полюсов; при каждом значении скорости работает (подключена к сети) только одна из них;
- используется специальная обмотка, позволяющая получить разное число пар полюсов путем изменения (переключения) схемы соединения. Здесь при любой из возможных скоростей используются все обмотки статора (на рисунке приведена схема переключения обмоток АД, позволяющая реализовать число пар полюсов р 1 или 2).
Недостаток такого способа регулирования скорости – увеличенные габариты, масса и стоимость, сложность коммутационных устройств.
4.4.3 Регулирование изменением скольжения
Для АД с КЗ ротором возможны два способа:
Рис.
45-4. Механические характеристики при
регулировании частоты вращения ротора.
1)
– при различных напряжениях U1;
2)
– при введении в цепь обмотки ротора
дополнительного активного сопротивления
Очевидно, что данный способ может использоваться и для АД с фазным ротором. Для регулирования питающего напряжения U1 используются автотрансформатор в первичной цепи или реостат. При таком способе регулирования снижается КПД, поэтому он применяется для регулирования маломощных АД.
б) Импульсное регулирование скорости. Осуществляется путем периодического включения АД в сеть и отключения его, либо периодического шунтирования резисторов, включенных последовательно в цепи питания статора. При этом АД все время работает в переходном режиме разгон – торможение (см. п. , импульсное управление Д=Т). Используется этот способ обычно для управления маломощными ИД.
Для АД с фазным ротором имеется возможность включения регулирующих устройств во вторичную цепь машины – цепь ротора. Возможны два варианта:
а) включение реостата в цепь ротора. Схема – та же, что и при реостатном пуске АД с фазным ротором. При увеличении сопротивления регулировочного реостата Rp механическая характеристика становится более мягкой, и скольжение S при неизменном моменте нагрузки на валу Мв увеличивается (скорость n уменьшается).
К недостаткам такого способа регулирования скорости можно отнести наличие потерь в R, "мягкость" механической характеристики, зависимость диапазона регулирования скорости n от величины нагрузки Мв.
б) введение добавочной ЭДС во вторичную цепь АД (цепь ротора). Этот способ используется достаточно редко в так называемых каскадных соединениях при больших мощностях электрических машин.