

3. Задание.
 Задание
2. Приборный
блок установлен на упругие опоры
(амортизаторы). Его вертикальные колебания
описываются дифференциальным уравнением:
Задание
2. Приборный
блок установлен на упругие опоры
(амортизаторы). Его вертикальные колебания
описываются дифференциальным уравнением:
 ,
,
где
 - отклонение блока от исходного положения,
- отклонение блока от исходного положения,
 - время,
- время,
 – масса блока,
– масса блока,
 - ускорение,
- ускорение,
 – коэффициент трения (в амортизаторах),
– коэффициент трения (в амортизаторах),
 - скорость движения при колебаниях
блока,
- скорость движения при колебаниях
блока,
 - слагаемое, отвечающее за сопротивление
упругих элементов (пружин),
- слагаемое, отвечающее за сопротивление
упругих элементов (пружин),
 - коэффициент жесткости амортизаторов.
- коэффициент жесткости амортизаторов.
Амортизаторы имеют
встроенные демпфирующие элементы.
Поэтому коэффициент трения
зависит от деформации
 .
.
Решите уравнение
для следующих исходных данных: коэффициент
трения
 Н/м; начальные условия
Н/м; начальные условия
 см и
см и
 при
при
 .
Остальные параметры заданы в таблице.
.
Остальные параметры заданы в таблице.

Таблица 1. Таблица начальных данных для всех вариантов задания 2.
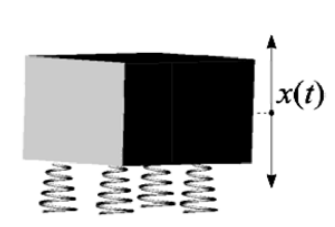 Рис.
6. Блок на
амортизаторах.
Рис.
6. Блок на
амортизаторах.
Получите начальные
точки решения, охватывающие несколько
периодов колебаний, и постройте по ним
соответствующий участок зависимости
 .
.
4. Решение задания в MathCad.
В системах MathCAD имеются удобные в практическом применении средства для решения линейных и нелинейных дифференциальных уравнений и систем этих уравнений. Для этого предусмотрен ряд встроенных функций (rkfixed, odesolve).
Решение уравнения методом Рунге-Кутта с помощью оператора Odesolve. Встроенная функция odesolve(x, x2,[m]) обеспечивает решение одного обыкновенного дифференциального уравнения методом Рунге-Кутта с постоянным (по умолчанию) или адаптивно вычисляемым системой шагом интегрирования. Формат функции odesolve предполагает указание в числе ее аргументов переменной интегрирования, ее правого граничного значения и числа точек, в которых будет найдено решение, то есть odesolve(x, x2,[m]), где квадратные скобки означают, что указание числа точек, в которых ищется решение, не обязательно. Результатом применения odesolve служит функция у(х), аргумент которой определен на интервале (xl, х2). Эта функция может быть непосредственно использована для построения графика и вывода ее числового значения при фиксированном значении аргумента.
Решение
уравнения методом Рунге-Кутта с помощью
оператора rkfixed.
Встроенная
функция rkfixed
(y0,t0,tk,N,f)
обеспечивает решение уравнений методом
Рунге-Кутта с постоянным шагом
интегрирования, равным (tk
– t0)/N.
При ее использовании следует учесть,
что предварительно в документе MathCAD
должны быть введены: векторная функция
f(t,y)
с указанием ее аргументов и начальный
вектор состояний. Результаты решения
задач интегрирования систем дифференциальных
с помощью rkfixed
формируются системами MathCAD
в виде (l+
1)
* (п
+ 1)
- матрицы (таблицы), первый столбец
которой содержит значения аргументов
от t0
до tk,
а остальные п
ее
столбцов образуются значениями элементов
вектора у
переменных состояний исследуемой
системы. Таким образом, число элементов
каждого  из
столбцов результирующей матрицы
определяется параметром l,
введенным
в качестве аргумента соответствующей
функции.
из
столбцов результирующей матрицы
определяется параметром l,
введенным
в качестве аргумента соответствующей
функции.
4.1. Метод Эйлера.

Рис. 7. Вычисления по методу Эйлера.


Рис. 8. Решение по методу Эйлера.

Рис. 9. График зависимости x(t).
Колебания, протекающие по закону косинуса:
 ,
где
,
где
 – начальная амплитуда (она же является
максимальной),
- коэффициент затухания,
– начальная амплитуда (она же является
максимальной),
- коэффициент затухания,
 - начальная фаза колебаний,
- начальная фаза колебаний,
 – циклическая частота колебаний (число
колебаний за
– циклическая частота колебаний (число
колебаний за
 секунд),
секунд),
 - механическая частота колебаний (число
колебаний в единицу времени – в секунду),
- механическая частота колебаний (число
колебаний в единицу времени – в секунду),
 - период колебаний (время, за которое
совершено одно полное колебание (на
графике – расстояние между двумя
соседними максимумами функции). По
графику можно вычислить:
- период колебаний (время, за которое
совершено одно полное колебание (на
графике – расстояние между двумя
соседними максимумами функции). По
графику можно вычислить:
 м,
м,
 с,
с,
 Гц,
Гц,
 Гц.
Гц.

Необходимо заметить, что колебания блока на амортизаторах имеют периодический характер, затухают и со временем прекращаются, что мы наглядно видим на рис. 9.

Рис. 10. Уменьшение шага метода Эйлера.


Рис. 11. Решение по методу Эйлера с уменьшенным в 2 раза шагом.

Рис. 12. График зависимости x(t) с уменьшенным вдвое шагом.
Колебания, протекающие по закону косинуса:
, где – начальная амплитуда (она же является максимальной), - коэффициент затухания, - начальная фаза колебаний, – циклическая частота колебаний (число колебаний за секунд), - механическая частота колебаний (число колебаний в единицу времени – в секунду), - период колебаний (время, за которое совершено одно полное колебание (на графике – расстояние между двумя соседними максимумами функции). По графику можно вычислить:
м,
с,
Гц,
Гц.

Исходя из рис. 12, характер графика, показанный на рис. 9, не претерпел изменений, что доказывает правильность выбора нового шага.

Рис. 13. Погрешность метода Эйлера.