Лекция. Декомпозиция процесса проектирования гидроприводов
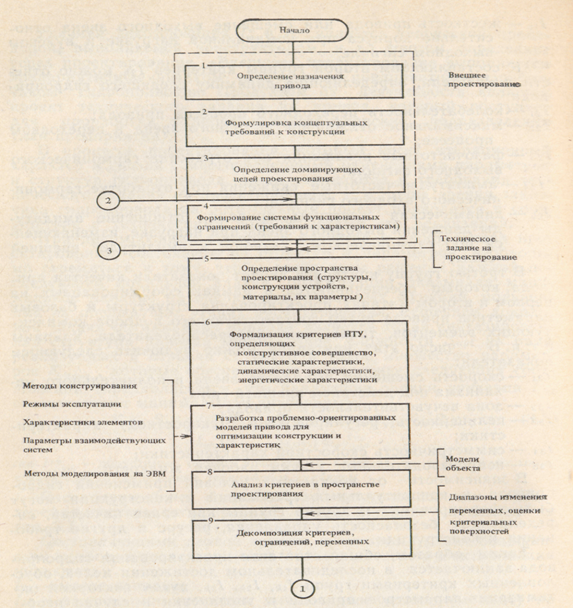
Проектирование приводов в структурном отношении представляет собой итерационный процесс, охватывающий часто все этапы проектирования, включая внешнее проектирование, при котором формируются технические требования, предъявляемые к приводу разработчиками объекта (станка, робота, машины, самолета и т. п.) в виде технического задания на проектирование.
Опыт разработки приводов на специализированных предприятиях показывает, что прямой синтез гидропривода, удовлетворяющего всем ограничениям, указанным в техническом задании на проектирование, вряд ли возможен из-за противоречивости требований и высокой размерности глобального критерия качества, учитывающего всю совокупность показателей качества, а также из-за недостатка формализованной в виде критериев информации, учитывающей опыт и интуицию конструктора. Несмотря на появление значительного количества научных работ в области сравнительно новой теории алгоритмизации творчества и аналитических методов принятия решений при проектировании, индивидуальные начала инженерного проектирования являются в настоящее время основными.
Общую структуру процесса проектирования гидроприводов в САПР можно представить в виде алгоритма, в котором чередуются поисковые, расчетные и иные процедуры, выполняемые ЭВМ, и творческие процедуры, связанные с принятием решений о приемлемости получаемых результатов или об изменении направления поиска, выполняемые конструктором.
Для реализации такой концепции проектирования необходима декомпозиция общей задачи проектирования привода на ряд последовательно решаемых1 подзадач меньшей размерности. Естественно, что для различных типов приводов и конкретных требований к их конструкции указанная декомпозиция задачи проектирования будет различна.
Рассмотрим декомпозицию задач проектирования гидропривода на примере электрогидравлического следящего привода, получившего широкое применение в различных отраслях машиностроения, управляющего положением инерционного объекта через упругую механическую связь с малым собственным демпфированием.
В
результате «внешнего» по отношению к
предприятию-разработчику гидропривода
проектирования системы управления
объектом формируются технические
требования к рабочим характеристикам
и показателям качества, которые можно
формально представить в виде системы
неравенств. Общей целью проектирования
является синтез структуры гидропривода
и его параметров, обеспечивающих
выполнение указанной системы неравенств
при минимизации массы привода. Если
обозначить совокупность критериев,
определяющих технические требования
к рабочим характеристикам гидропривода,
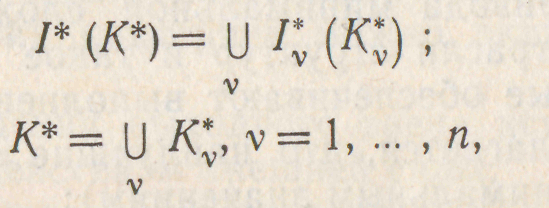
через I*(K*)
(где К*—множество
конструктивных параметров привода), то
естественно стремление проектировщика
привода произвести декомпозицию
множества I*(K*)
таким обра![]() зом,
чтобы выполнялось условие
зом,
чтобы выполнялось условие
 (3.1)
(3.1)
где n
— число подмножеств критериев,
характеризующих определенные свойства
привода;![]() —непересекающиеся
подмножества проектируемых параметров,
за счет которых можно обеспечить
достижение заданных показателей
качества.
—непересекающиеся
подмножества проектируемых параметров,
за счет которых можно обеспечить
достижение заданных показателей
качества.
В этих выражениях
![]() (3.2)
(3.2)
где k
—
индекс частного показателя качества
привода в
![]() -м
подмножестве.
-м
подмножестве.
Синтез
параметров
приводов можно осуществлять путем
последовательного решения частных
задач параметрической оптимизации
по скалярным критериям
![]() ,
обращая
остальные k—1
критериев в ограничения, либо по векторным
критериям
,
обращая
остальные k—1
критериев в ограничения, либо по векторным
критериям
![]() ,
образованным
ранжированием по важности составляющих
,
образованным
ранжированием по важности составляющих
![]() .
Если декомпозиция (3.1) невозможна и два
или более множеств пересекаются, то
необходимо увеличивать размер-кость
оптимизационных задач путем объединения
этих пересекающихся множеств в новое
— большей размерности. При использовании
декомпозиции на каждом этапе проектирования
конструктор оперирует значительно
меньшим объемом информации.
.
Если декомпозиция (3.1) невозможна и два
или более множеств пересекаются, то
необходимо увеличивать размер-кость
оптимизационных задач путем объединения
этих пересекающихся множеств в новое
— большей размерности. При использовании
декомпозиции на каждом этапе проектирования
конструктор оперирует значительно
меньшим объемом информации.
При
декомпозиции критериев качества и
пространства проектирования,
состоящего из структур и параметров,
необходимо стремиться к тому, чтобы
результаты решения каждой последующей
локальной задачи оптимизации оказывали
минимальное влияние на оценки
критериальных функций, полученных
на предыдущих этапах проектирования.
Решением локальной задачи оптимизации
привода является такая синтезированная
структура привода минимальной сложности
![]() из ряда реализуемых в отрасли структур
и такое множество параметров
из ряда реализуемых в отрасли структур
и такое множество параметров
![]() ,
которые обеспечивают выполнение
следующих соотношений (предполагается,
что наилучшие оценки критерия
,
которые обеспечивают выполнение
следующих соотношений (предполагается,
что наилучшие оценки критерия
![]() соответствуют
минимальным значениям):
соответствуют
минимальным значениям):

Общая
стратегия проектирования гидропривода
заключается в последовательном достижении
целей, обусловленных критериями
групп
![]() ,
,
![]() ,
,
![]() ,
путем векторной оптимизации параметров
привода и увеличения в случае необходимости
сложности его структуры путем введения
дополнительных корректирующих
устройств, клапанов и других элементов.
Такое построение процесса проектирования
не приводит к единственному оптимальному
проекту привода, так как на некоторых
уровнях принятия решений возникают
альтернативные варианты, эффективность
которых можно оценить лишь на конечном
этапе проектирования методом имитационного
моделирования.
,
путем векторной оптимизации параметров
привода и увеличения в случае необходимости
сложности его структуры путем введения
дополнительных корректирующих
устройств, клапанов и других элементов.
Такое построение процесса проектирования
не приводит к единственному оптимальному
проекту привода, так как на некоторых
уровнях принятия решений возникают
альтернативные варианты, эффективность
которых можно оценить лишь на конечном
этапе проектирования методом имитационного
моделирования.