

1.3. Сравнительный анализ адаптивных управляющих систем управления с распознаванием образов и обучаемых систем управления
Попытки решения задачи разработки системы управления, позволяющей роботу функционировать в недетерминированной среде производства, а также действовать в человеческом обществе в реальном времени, т.е. решать задачи любой сложности с требуемым быстродействием, основывались на использовании теории распознавания образов [3 – 24]. Считалось, что такие системы должны сначала собрать информацию о ситуации, затем математически ее обработать и по результату обработки отнести эту ситуацию к какому-либо классу, т.е. распознать ее, и уже на основе результата распознавания принять соответствующее решение, применительно к роботу – сформировать и послать на исполнительные двигатели сигналы управления, обеспечивающие выполнение поставленной перед роботом задачи.
Было разработано множество различных способов и методов распознавания образов: сравнение с эталоном, сегментация, выделение границ, разметка, статистические методы распознавания, синтаксические методы и т.д. Поскольку все эти способы являются продуктом человеческого интеллекта и не существуют в живой природе, можно предположить, что таких способов может быть бесконечное множество. Данные способы требуют мощного математического обеспечения, поэтому для их реализации используется дискретная вычислительная техника. Из множества методов распознавания образов следует выделить персептронную модель распознавания как попытку воспроизвести принципы биологических систем управления с элементами обучения [3, 4]. Эта модель характеризуется хаотичностью структуры и искусственными математическими методами обработки информации. Возможности персептронов очень ограничены, поэтому они не нашли широкого распространения. М.Минский и С.Пейперт [4] доказали принципиальную невозможность решения персептроном ряда задач, в частности он не может распознать один предмет на фоне другого. Все это заставило отказаться от персептронов и сосредоточить внимание исследователей на других способах распознавания. Среди них можно отметить метод сегментации [22]. Смысл его состоит в автоматическом разбиении изображения на содержательно интерпретируемые области. Все эти области должны быть связанными, и разбиение должно существовать в единственном варианте. При этом каждой области присваивается своя метка. Статистические методы [22] основываются, главным образом, на минимизации оценки ошибки классификации с помощью априорных вероятностей и плотностей распределения. Существуют и так называемые синтаксические методы распознавания изображений [23]. При этом подходе изображение представляется предложением (конструкцией языка, которая определяется вводимой грамматикой). При описании объектов и сцен с помощью этих методов используются формальные грамматики, а процесс принятия решения представляет собой синтаксический анализ. В последнее время активно исследуются распознающие модели с использованием нейронных сетей и методов обучения этих сетей распознаванию [43 – 52]. Из практически реализованных первых распознающих устройств можно отметить персептрон “Марк-1” Ф.Розенблатта, имевшего 20х20 фоторецепторов, 512 пороговых и 8 нейронных элементов, и созданные в Институте Кибернетики АН СССР под руководством Н.М.Амосова транспортные роботы, которые имели нейронную сеть из 200 нейронов с 2000 связей. Последнее достижение в области распознавания – так называемый нейрокомпьютер [43, 51], на разработки которого во многих странах выделяются большие средства и силы, и в основе которого лежат нейронные сети. Схемно сильно напоминают технический мозг обучаемой системы управления так называемые линейные машины (рис.1.7) [5]. Разница между ними, прежде всего, в назначении: линейные машины предназначены для распознавания образов, представленных векторами X(x1, x2, . . . , xi, . . . , xd) , технический мозг – для преобразования выходных сигналов рецепторов в сигналы управления исполнительными двигателями объекта управления (именно такую функцию выполняет мозг в биологических системах). Следствием различного назначения являются схемные отличия. Так, в линейных машинах число групп (R) весов W соответствуют числу R различных классов распознаваемых образов, а в обучаемых системах управления число групп весовых коэффициентов соответствует числу исполнительных двигателей объекта управления. Кроме того, выход линейной машины L0 (выход блока выбора максимума дискриминантных функций g(X)) – это код класса распознанного образа, по которому выбирается так называемый вектор управления, который затем преобразуется в сигналы управления исполнительными двигателями; для этой цели используется уже последующее устройство. Обучаемая система управления непосредственно формирует сигналы управления каждым исполнительным двигателем объекта управления, поэтому блок выбора максимума у нее отсутствует, а выходами системы являются выходы сумматоров, соответствующих исполнительным двигателям объекта. Указанные отличия – принципиальные и исходные. Развитие обучаемых систем управления сопровождалось появлением других схемных отличий, часть из которых отражена в описаниях к авторским свидетельствам и патентам [58, 75–81].
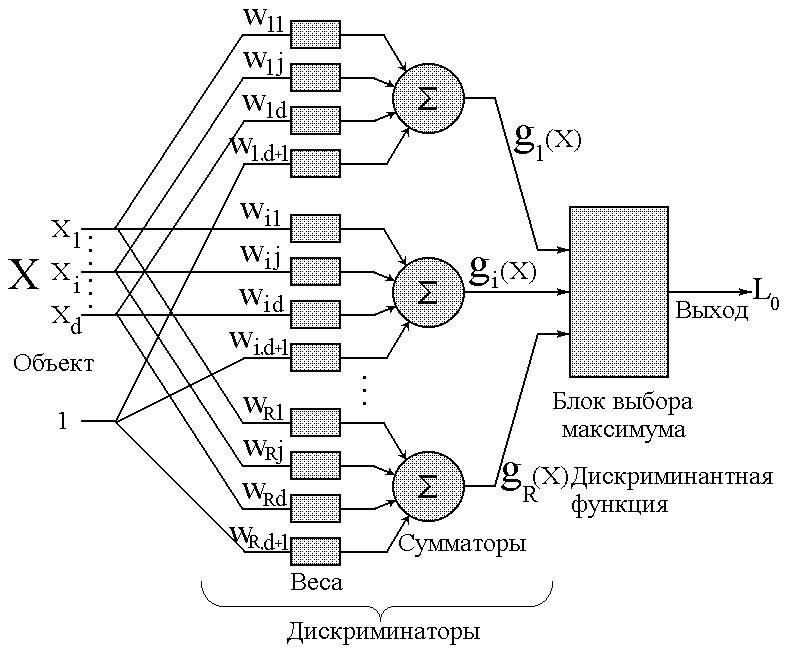 Рис.1.7.
Линейная машина
Рис.1.7.
Линейная машина
Из множества методов распознавания следует выделить методы, использующие процедуру обучения. Общее понятие процедуры обучения дается, в частности, Цыпкиным Я.З. [10]: “Под обучением мы будем подразумевать процесс выработки в некоторой системе той или иной реакции на внешние сигналы путем многократных воздействий на систему и внешней корректировки”. Однако, цели обучения распознаванию и обучения обучаемой системы управления совершенно различны. Содержательная постановка задачи обучения распознаванию образов состоит в следующем. Имеется некоторое множество наблюдений, которые относятся к p различным классам. Требуется, используя информацию об этих наблюдениях и их классификациях, найти такое правило, с помощью которого можно было бы с минимальным числом ошибок классифицировать вновь появляющиеся наблюдения [19]. Содержательная постановка задачи обучения обучаемых систем управления состоит в другом: обучить систему формировать заранее известные требуемые сигналы управления всеми исполнительными двигателями объекта управления именно в тех ситуациях, которые включены в обучаемую выборку, сформированную обучателем. Если в какой-либо другой ситуации, не входящей в обучаемую выборку, сигналы управления не устраивают обучателя, то такая ситуация включается в обучаемую выборку и производится дообучение системы. Таким образом, в отличие от обучения распознаванию, в обучаемых системах управления реализуется обучение управлению исполнительными двигателями объекта управления. Сами процедуры обучения рассматриваемых систем также имеют определенные отличия. При решении задачи распознавания образов обучение в нейронных сетях осуществляется “учителем”, которым может быть система, указывающая на правильность или ошибочность реакции и назначающая поощрение или штраф за функционирование [20]. Такая процедура определяется тем, что оценка результата распознавания может быть одной из двух: “верно” или “неверно”. Если “верно”, то назначается поощрение, если “неверно” – наказание. К обучаемым системам управления подход другой: здесь важно, насколько выходной сигнал управления отличается от требуемого, поэтому обучение таких систем заключается в корректировке (поправке) весовых коэффициентов пропорционально возбуждениям их рецепторов таким образом, чтобы получить требуемые сигналы управления. Для обучаемых систем управления, как и “во всех задачах распознавания образов предполагается, что для обучения собран материал – обучающая последовательность, т.е. некоторая совокупность образов или реализаций процесса, классификация которых достоверно известна” [19]. Только в случае обучаемых систем управления речь идет не о классификации образов (для них это не имеет никакого значения), а о величинах сигналов управления исполнительными двигателями в этих ситуациях. Кроме того, как будет показано в данной работе, есть возможность обучать систему управления так называемым “вождением за руку” или “натаскиванием”, т.е. без формирования обучаемой выборки. Далее при обучении распознаванию образов было отмечено, что “скорость обучения существенно зависит от порядка предъявления векторов. Обычно лучший результат достигается при предъявлении представителей различных классов вперемежку” [12]. Вопрос зависимости продолжительности обучения системы управления от порядка предъявления ситуаций, является предметом исследований и в данной работе. Будет показано, что продолжительность обучения значительно снижается, если на каждом шаге обучения предъявлять ситуацию, в которой ошибка сигнала управления – наибольшая. В отличие от обучения распознаванию образов, для которого “основой для построения оценок при обучении и самообучении служат методы классической статистики” [7], обучение и работа обучаемых систем управления не носят вероятностный характер. Сложной проблемой обучения распознаванию образов является выделение так называемых значимых признаков: “главным препятствием при практическом распознавании образов является наличие мешающих параметров в необработанных данных. Снижение размерности и преобразование колебаний или изображения в вектор признаков образа или вектора данных в вектор признаков исключает мешающие параметры при “правильном” его применении” [7]. “Процедуры восстановления зависимостей (обучение распознаванию образов) строят по обучающей последовательности функцию, реализующую правило распознавания. Такая функция называется также решающим правилом. Попутно может выясниться, что ряд параметров несущественен для распознавания. Тогда будет выделено подмножество значимых признаков. Только они и берутся в качестве аргументов решающего правила” [19]. Для обучаемых систем управления наличие мешающих или незначимых признаков никак не сказывается на обучении и работе. Кроме того, при распознавании чрезмерно большая емкость класса решающих правил при ограниченном объеме обучающей последовательности недопустима, и поэтому возникает проблема оптимального разбиения на градации непрерывных признаков [19]. Для обучаемых систем, наоборот, увеличение числа градаций увеличивает степень отличия ситуаций, что ускоряет обучение и повышает точность работы этих систем. Подытоживая, можно отметить следующее. Поскольку методы распознавания громоздки, большое число учитываемых факторов затрудняет математическую обработку информации. При этом следует помнить, что, чем меньше факторов используется при распознавании, тем хуже работа устройства, т.к. увеличивается риск принятия неверного решения в ситуации, когда информация о ней слишком неполная. Чем сложнее задача, тем ниже быстродействие распознающей системы. До сих пор отсутствуют эффективные алгоритмы анализа сложных изображений, а также методы четкого выделения информативных признаков и методики выбора алгоритма для решения конкретной задачи. Кроме этого, при анализе изображений приходится обрабатывать большие объемы информации, и вследствие этого существенно сократить время обработки пока не удается [23]. Обучаемые системы управления не используют процедуру распознавания, а работают на иных принципах. В этих системах информация, поступающая на рецепторы очувствления, проходя через резисторную матрицу, как через своеобразный преобразующий фильтр, непосредственно поступает на исполнительные двигатели в качестве сигналов управления. Проводимость же элементов матрицы формируется многократным обучением. Таким образом, исследуемые в данной работе системы являются обучаемыми системами управления в отличие от обучаемых систем распознавания образов. Если обучаемые системы управления воспринимают зрительную информацию, то они являются системами управляющего зрения в отличие от систем технического зрения, распознающих зрительные образы.
Сравнение процедур управления с использованием систем распознавания образов и обучаемых систем управления представлено на рис.1.8. В рисунке использованы следующие обозначения: ОУ – объект управления (транспортная тележка); СТЗ – система технического зрения; ВК – видеокамера; УРО – устройство распознавания образов; УУ – устройство управления; X, Y, Z – геометрические координаты; ТГ – технический глаз; УП – устройство преобразования сигналов рецепторов в сигналы управления; ОСУ (СУЗ) – обучаемая система управления (система управляющего зрения).
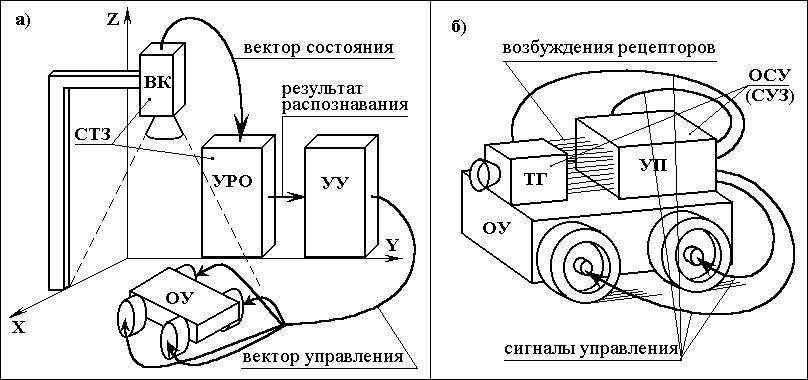 Рис.1.8.
Схема процедуры управления:
а)
системой управления с распознаванием
образов;
б) обучаемой системой
управления
Рис.1.8.
Схема процедуры управления:
а)
системой управления с распознаванием
образов;
б) обучаемой системой
управления
Из представленных схем видно, что в процессе управления обучаемой системой (рис.1.8,б) отсутствуют процедура распознавания и процедура формирования вектора управления, который затем раскладывается на сигналы управления исполнительными двигателями, и каждая процедура требует значительных временных затрат, что ограничивает быстродействие системы [24]. В обучаемых системах таких потерь времени нет, здесь сигналы рецепторов технического глаза сразу преобразуются в сигналы управления исполнительными двигателями.
В заключение следует отметить: при попытках создания систем, работающих по принципу мозга, была нарушена поэтапность исследований, т.к. сразу делались попытки смоделировать мозг человека. Как заметил Ф.Уоссерман: “Структура искусственных нейронных сетей была смоделирована как результат изучения человеческого (выделено автором этой книги) мозга” [51]. В частности, задача распознавания образов, другими словами – классификация (отнесение конкретной книги к классу “книги”, конкретного стула – к классу “стулья”), является абстрактной задачей, т.к. предполагает наличие абстрактных понятий – классов образов, таких как, например, “круги”, “квадраты”, “треугольники”, “столы”, “книги” и т.д. и т.д. Решение подобных задач свойственно только человеку, животные же абстрактными понятиями не оперируют! “Для простейшего животного задача нервной системы состоит в том, чтобы преобразовать ощущения, вызываемые внешним миром, в определенную двигательную активность” [40], именно такую задачу на данном этапе и решают обучаемые системы управления, при этом процедура распознавания образов, как необходимое условие формирования сигналов управления, не используется.