

1. Аналитический обзор информационно-управляющих систем промышленных роботов
1.1. Современное состояние систем управления роботами, использующих процедуру обучения
Существует множество систем управления роботами, по отношению к которым используется прилагательное “обучаемая” [9 – 15]. Можно выделить три основных типа автоматических систем управления, использующих процедуру обучения (рис.1.1). Первый вариант обучаемых роботов (рис.1.1, а) имеет системы управления, в которых используется подход к решению задачи управления, заключающийся в жестком программировании обучением. Такие роботы могут функционировать только в детерминированной среде. Так называемое “обучение” этих роботов заключается в запоминании траектории движения, задаваемой обучателем, например методом “вождения за руку” (рис.1.2). В качестве аппаратной реализации используются системы числового программного управления (ЧПУ). Классическим примером такого робота является промышленный робот COAT-A-MATIC (Япония) [27]. Данные роботы не являются адаптивными и требуют полного упорядочения рабочей среды, подачи деталей и заготовок в стандартные позиции с известной ориентацией. Отсутствие информации о реальной внешней среде, которая является необходимой при выполнении таких технологических операций, как сборка, сварка и другие, а следовательно, невозможность учитывать состояние внешней среды при выработке управляющих воздействий системой управления, препятствует использованию таких роботов. Кроме того, режимы обучения и автоматического воспроизведения движения по обученной траектории существенно различаются. Получающееся различие динамических нагрузок в режимах обучения и автоматической работы системы, а также наличие зазоров, трения и упругости механических передач между датчиками обратных связей по положению и звеньями руки являются основной причиной появления статических ошибок положения.
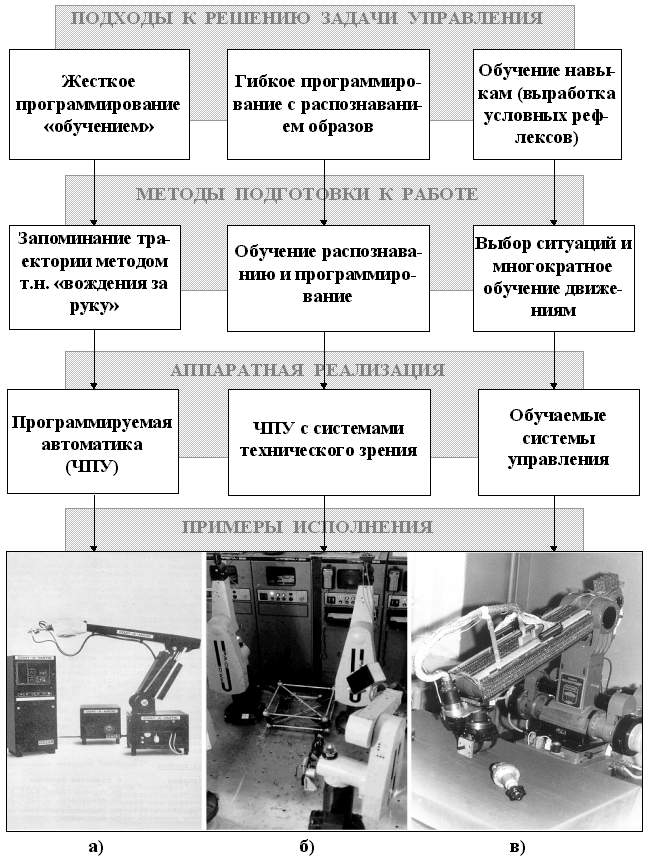 Рис.1.1.
Основные типы систем автоматического
управления роботами, в которых используется
понятие “обучение”
Рис.1.1.
Основные типы систем автоматического
управления роботами, в которых используется
понятие “обучение”
Метод программирования обучением применяется в случаях, когда оператору известны все особенности будущих движений. При относительно сложной логике выполнения движения, зависящей от состояния внешнего оборудования, а также в тех случаях, когда программа движений формируется на основе обработки информации, воспринимаемой внешними сенсорами, программирование методом обучения становится непригодным. В этих случаях применяется метод адаптивного управления. Дальнейшее развитие систем управления определялось теорией распознавания образов. Такие системы являются адаптивными так как позволяют учитывать изменения окружающей обстановки. Для получения функциональной способности таких систем управлять роботом применяется метод гибкого программирования с распознаванием образов [3 – 24]. Способность к распознаванию образов часто достигается с помощью процедуры обучения. Роботы, оснащенные такими системами – это второй вариант обучаемых роботов (рис.1.1, б). Они имеют более гибкие возможности, но работа их все равно программируется.
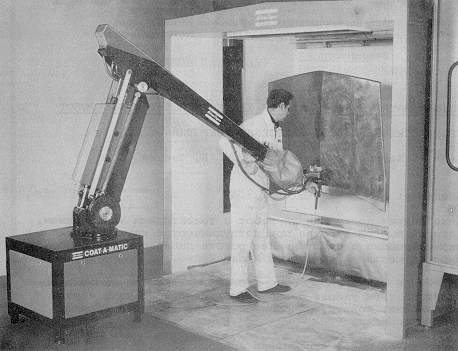 Рис.1.2.
Обучение робота методом “вождения за
руку” [27]
Рис.1.2.
Обучение робота методом “вождения за
руку” [27]
Для функционирования робота в естественной среде ему необходимо воспринимать как можно больше информации от различных датчиков. С увеличением их количества информация о среде становится полнее, но при этом развитая система знаний будет практически всегда противоречивой. Выделяют следующие источники противоречий: помехи, сбои, недостаточная точность датчиков; искажения, вносимые распознающими системами, поскольку распознавание всегда связано с аппроксимацией исходных данных; динамическая среда; неполнота описания внешнего мира. Наличие указанных противоречий затрудняет использование распознающих систем. Появление обучаемых систем управления [58] сделало возможным появление третьего варианта обучаемых роботов – непрограммируемых, обучаемых, способных действовать в сложных, неопределенных заранее ситуациях, характеризуемых неорганизованной информацией (рис.1.1, в). Управление движениями такого робота осуществляется не программой, а окружающей его обстановкой, информация о которой снимается системой очувствления и преобразуется обучаемой системой в сигналы управления исполнительными двигателями робота в соответствии с его опытом, полученным в результате обучения. Процесс обучения данной системы аналогичен выработке условных рефлексов у животных. Обучаемая система управления робота включает технические органы чувств (технические глаза, уши, кожу и т.д.), состоящие из рецепторов очувствления, и технический мозг, то есть преобразователь сигналов рецепторов в выходные сигналы управления. Применительно к роботу, обучаемая система управления, таким образом, является технической нервной системой. Технический мозг может быть выполнен в виде матрицы регулируемых резисторных элементов. Кроме этого система включает усилители (сумматоры-вычитатели), выходы которых являются выходами на исполнительные двигатели объекта управления, и включает устройство обучения, с помощью которого корректируются проводимости элементов резисторной матрицы.
Следует немного коснуться истории разработки технических нервных ситем. Инициатором и руководителем этих работ в Липецком политехническом институте стал доцент кафедры технологии машиностроения, к.т.н. Антонов Владимир Михайлович. Первая его заявка по данной теме называлась “Обучаемая система управления”. Она была подана 29 августа 1985 года и зарегистрирована под номером 3949838/08 Государственным комитетом СССР по делам изобретений и открытий. Вторая заявка на изобретение “Обучаемая и самообучающаяся система управления и регулирования” (автор Антонов В.М.) подана 10 октября 1985 года и зарегистрирована под номером 3965056/08. В третьей заявке на изобретение, именуемой “Обучаемое устройство для распознавания образов” (автор Антонов В.М.), поданной 18 октября 1985 года и зарегистрированной под номером 3967683/24, и в четвертой заявке, именуемой “Обучаемая система технического зрения” (того же автора), поданной 29 октября 1985 года и зарегистрированной под номером 3971956/08, рассматривалось конкретное применение обучаемой системы с техническим зрением для управления, в частности, роботами, описывался технический глаз, имеющий сетчатку из рецепторов. Вскоре же (4 ноября 1985 года) была подана заявка “Рецепторный датчик положения обучаемой системы управления” (авторы: Антонов В.М., Кавыгин В.В.) на которую было выдано первое авторское свидетельство. Первые заявки утвердили отечественный приоритет в изобретении такой автоматической системы управления, у которой законы управления не разрабатываются логически, а формируются автоматически в процессе обучения. В этих заявках на изобретения произошло уточнение терминологии, были выявлены некоторые особенности обучаемых систем управления, определено их назначение и области применения. Первый научный доклад по обучаемым системам управления Владимир Михайлович Антонов сделал 6 декабря 1985 года в Липецке на областной научно-практической конференции “Автоматизация и механизация производственных процессов” [59]. Мне довелось включиться в работу по созданию обучаемых систем управления в начале 1986 года. Результаты этой работы я постарался изложить в открытой Вами книге.
Начнем с основных принципов функционирования обучаемых систем управления (технических нервных систем).