

Векторный и тензорный анализ_1 / chap_5
.docматематический анализ. 3 семестр. Логинов А.С. 2005 г. loginov_1999@mail.ru
Глава 5. Преобразования базисов и координат, криволинейные координаты
§1. Преобразования базисов и координат
-
Взаимные, сопряженные базисы
В дальнейшем речь пойдет о базисах в трехмерном пространстве.
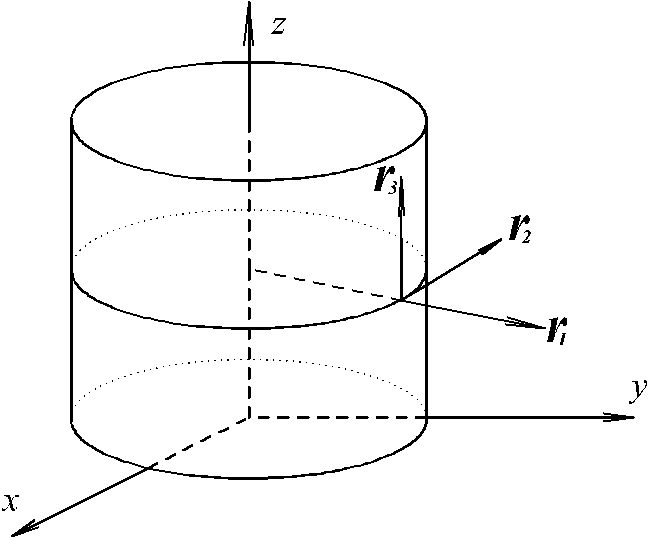
Определение.
Базисы ri
, rk
называются взаимными или сопряженными,
если выполнено условие (ri
, rk)
=
![]() .
.
Теорема. Для любого базиса ri существует единственный взаимный базис.
Из
условия r1
![]() r2
, r1
r2
, r1
![]() r3
, поэтому
этот вектор надо искать в виде c[r2
, r3],
из условия (r1
, r1)
= 1 находится
множитель c.
Таким образом,
r3
, поэтому
этот вектор надо искать в виде c[r2
, r3],
из условия (r1
, r1)
= 1 находится
множитель c.
Таким образом,
r1 = [r2 , r3]/( r1 , r2 , r3 ), r2 = [r3 , r1]/( r1 , r2 , r3 ), r3 = [r1 , r2]/( r1 , r2 , r3 ).
Любой вектор пространства можно разложить по базисам
x =
![]() xk
rk
=
xk
rk
=
![]() rk
xk
.
rk
xk
.
Координаты xk называются ковариантными координатами, а xk – контравариантными координатами.
Соглашение 1. В любом выражении состоящем из некоторого числа сомножителей наличие индекса у двух сомножителей на разных уровнях будет означать суммирование по этому индексу от 1 до 3.
Соглашение 2. Иногда, если не возникает путаницы, стрелка над вектором будет опускаться. Тоже самое касается жирности шрифта для обозначения вектора.
Например, формулы разложений по базисам будут выглядеть следующим образом
x = xk rk = rk xk .
Еще
один пример: ai![]() cj
=
cj
=
![]() ai
ai![]() cj
.
cj
.
Найдем выражение для ко и контравариантных координат
x = xi ri = ri xi
xi = (x, ri ), xi = (x, ri) (1).
Подставляя выражения для координат в разложения вектора, получим формулы Гиббса
x = (x, ri ) ri = ri (x, ri) (2)
Подставим выражения x из формул Гиббса (2) в (1)
xi = (x,rj )(rj,ri) = xj gji (3)
xi = (rj,ri) (x,rj ) = gji xj (4)
Матрицы gji = (rj,ri), gji = (rj,ri) симметричны и называются метрическими тензорами. Беря в качестве x в формуле (2) вектора rj , rj получим формулы, связывающие векторы взаимных базисов с помощью метрических тензоров
rj = gji ri
rj = ri gji .
Подобные операции носят название операций поднимания и опускания индекса с помощью метрического тензора. Умножим первое равенство на rk второе на rk получим
![]() = gji
gik
= gji
gik
![]() =
gik
gji
.
=
gik
gji
.
Эти равенства показывают, что матрицы метрических тензоров взаимно обратные.
-
Преобразование координат
Даны
базисы ei
, ri
и ei
, ri
. Обозначим
матрицы связывающие эти базисы
![]() ,
,![]() ,
,![]() ,
,![]() .
.
ri
= ej
![]() , ei
= rj
, ei
= rj
![]()
![]()
![]() =
=
![]() (5)
(5)
rj
=
![]() ei
, ej
=
ei
, ej
=
![]() ri
ri ![]()
![]() =
=
![]() (6)
(6)
Умножая первое равенство из (5) на ek , а второе равенство из (6) на rk получим выражения для матриц перехода между базисами
(ri
, ek)
=
![]() ,
(ej
, rk
) =
,
(ej
, rk
) =
![]()
(ri
, ek
) =
(ri
, ek
) =
![]() .
.
Таким
образом,
![]() =
=
![]() .
Аналогично показывается, что
.
Аналогично показывается, что
![]() =
=
![]() .
Равенства (5),
(6) перепишутся
в виде
.
Равенства (5),
(6) перепишутся
в виде
ri
= ej
![]() , ei
= rj
, ei
= rj
![]() (7)
(7)
rj
=
![]() ei
, ej
=
ei
, ej
=
![]() ri (8)
ri (8)
Выпишем формулы преобразования координат при переходе к другому базису, например, для контравариантных координат.
x = ri
xi
, x = ei
yi
(7)
x = rj
![]() yi
xj
=
yi
xj
=
![]() yi.
yi.
§2. Выражение операций теории поля в криволинейных координатах
-
Введение.
В дальнейшем будут использоваться следующие обозначения. С исходной декартовой системой координат xyz ( или x1x2x3 ) связана криволинейная система координат x1x2x3 отображением
 или
или

Обозначим
ri
=
![]() .
.
-
Выражение градиента в криволинейных координатах
Для скалярного поля u градиент в декартовой системе координат равен
grad
u
=
![]() .
По формуле
дифференцирования сложной функции
.
По формуле
дифференцирования сложной функции
![]() =(grad
u
, ri
) = ui
. По
формулам Гиббса
=(grad
u
, ri
) = ui
. По
формулам Гиббса
grad u = (grad u , ri ) ri =ui ri .
Откуда
grad u =
ui
ri
= ui
![]() = ui
= ui
![]() .
.
-
Выражение дивергенции в криволинейных координатах
Отметим, что для взаимно обратных отображений
 и
и
 согласно правилам дифференцирования
сложных функций справедливы соотношения
согласно правилам дифференцирования
сложных функций справедливы соотношения
![]()
![]() или в матричном виде
или в матричном виде
 =
=
 .
.
Таким
образом, вектора
![]() являются сопряженными
к
являются сопряженными
к
ri
=
![]() ,
т. е. rj
=
,
т. е. rj
=![]() ,
ei
=
,
ei
=
![]() .
.
Обозначим
V
= Pi
+Qj
+ Rk
, Vi
=![]() =
=
![]() ,
тогда
,
тогда
div
V =
![]() =
=![]() +
+![]() +
+![]() =
=
=
![]() +
+
+
![]() +
+
+
![]() = (V1,r1)+(V2,r2)+(V3,r3)
= (Vk,rk)
=
= (V1,r1)+(V2,r2)+(V3,r3)
= (Vk,rk)
=
= .
.
В
ряде случаев приходится рассматривать
разложение исходного поля V
по базису ek
:
V
= Akek
. В этом
случае
предварительно
вычисляют производные Vk
и полученные
выражения подставляют в формулу для
данной операции, например, в формулу
div
V
=![]() .
Можно
показать, что div
V
=
.
Можно
показать, что div
V
=
![]() .
.
4. Выражение ротора в криволинейных координатах
V
= Pi
+Qj
+ Rk
,
Vi
=![]() =
=
![]() ,
,
rot
V =
 =
=![]() =
=
![]() =
=
=![]()
 =[rk
,
Vk]=
=[rk
,
Vk]=
![]() [rk
,
Vk]=
[rk
,
Vk]=
![]() [ek
,
Vk].
[ek
,
Vk].
-
Выражение оператора Лапласа в криволинейных координатах
grad
u =
![]() ,
,
![]() ,
Ak
=
,
Ak
=
![]() ,
div
grad u = (rk
, Vk).
Тогда
из формулы div
V
=
,
div
grad u = (rk
, Vk).
Тогда
из формулы div
V
=
![]() получим u
= div
grad
u
=
получим u
= div
grad
u
=
![]() .
.
§3. Выражение операций теории поля в цилиндрических координатах
1. Цилиндрические координаты (r, , h) = (x1,x2,x3).
x = r cos
y = r sin
z = h
-
r1 = (cos , sin , 0), H1 = |r1| = 1,
r2 = (-r sin ,r cos , 0), H2 = |r2| = r,
r3 = ( 0 , 0 , 1), H3 = 1.
e1 = er = (cos , sin , 0) ,
e2 = e = (-sin ,cos , 0) ,
e3 = eh = ( 0 , 0 , 1) .
Базис er , e , ez – ортонормированный.
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
-
Выражение градиента в цилиндрических координатах
grad
u = ui
ri
= ui
![]() = ui
= ui
![]() .
.
grad
u =![]() r1
+
r1
+![]()
![]() r2
+
r2
+
![]() r3
=
r3
=
![]() er
+
er
+![]()
![]() e
+
e
+
![]() ez
.
ez
.
-
Выражение дивергенции в цилиндрических координатах
V
= Pi
+Qj
+ Rk
,
Vi
=![]() =
=
![]() ,
V1
=
,
V1
=
![]() ,
V2
=
,
V2
=
![]() ,
V3
=
,
V3
=
![]() ,тогда
,тогда
V = Akek ,
V1
= Vr
=
![]() (
Akek)
= ek
(
Akek)
= ek
![]() Ak
+
Ak
Ak
+
Ak![]() ek
= ek
ek
= ek
![]() Ak
.
Ak
.
V2
= V
=
![]() (
Akek)
= ek
(
Akek)
= ek
![]() Ak
+
Ak
Ak
+
Ak![]() ek
= ek
ek
= ek
![]() Ak
+
A1e2
- A2e1
.
Ak
+
A1e2
- A2e1
.
V3
= Vh
=
![]() (
Akek)
= ek
(
Akek)
= ek
![]() Ak
+
Ak
Ak
+
Ak![]() ek
= ek
ek
= ek
![]() Ak
.
Ak
.
Отсюда следует
div
V
= (Vk,rk)
= =
=
![]() =
=![]() .
.
4. Выражение ротора в цилиндрических координатах
[e1, e2]=e3 , [e3, e1]=e2 , [e2, e3]=e1 ,
[e1,
V1]
=![]() [e1,
e2]
+
[e1,
e2]
+
![]() [e1,
e3]
=
[e1,
e3]
=
![]() e3
-
e3
-
![]() e2,
e2,
![]() [e2,
V2]
=
[e2,
V2]
=![]()
![]() =
=
![]()
![]() ,
,
[e3,
V3]
=![]() [e3,
e1]
+
[e3,
e1]
+
![]() [e3,
e2]
=
[e3,
e2]
=
![]() e2
-
e2
-
![]() e1
,
e1
,
rot
V
=![]() +
+![]() +
+![]() .
.
5. Выражение оператора Лапласа в цилиндрических координатах
H = H1 H2 H3 = r,
u
= div grad u =
![]() =
=
![]() =
=![]() .
.
§4. Выражение операций теории поля в сферических координатах
1. Сферические координаты (, , ) = (x1,x2,x3).
x = cos cos
y = cos sin
z = sin
-
r1 = (cos cos , cos sin , sin ),
H1 = |r1| = 1,
r2 = (- cos sin , cos cos , 0),
H2 = |r2| = cos ,
r3 = (- sin cos , - sin sin , cos ), H3 = .

e1 = e = (cos cos , cos sin , sin ),
e2 = e = (- sin , cos , 0),
e3 = e = (- sin cos , - sin sin , cos ).
Базис e , e , e – ортонормированный.
![]() ,
,
![]() = cos
e2
,
= cos
e2
,
![]() = - cos
e1
+ sin
e3
,
= - cos
e1
+ sin
e3
,
![]() = - sin
e2
,
= - sin
e2
,
![]() = e3
,
= e3
,
![]() = 0 ,
= 0 ,
![]() = - e1
.
= - e1
.
-
Выражение градиента в сферических координатах
-
grad u = ui ri = ui
 = ui
= ui
 .
.
grad
u =![]() r1
+
r1
+![]()
![]() r2
+
r2
+
![]()
![]() r3
=
r3
=
![]() e
+
e
+![]()
![]() e
+
e
+![]()
![]() e
e
-
Выражение дивергенции в сферических координатах
Пусть V = Akek ,
V1
= V
=
![]() (
Akek)
= ek
(
Akek)
= ek
![]() +
Ak
+
Ak![]() = ek
= ek
![]() .
.
V2
= V
=
![]() (
Akek)
= ek
(
Akek)
= ek
![]() +
Ak
+
Ak![]() =
=
=
ek
![]() –
A2
cos
e1
- A3sin
e2
+ A2
sin
e3
.
–
A2
cos
e1
- A3sin
e2
+ A2
sin
e3
.
V3
= Vh
=
![]() (
Akek)
= ek
(
Akek)
= ek
![]() +
Ak
+
Ak![]() = ek
= ek
![]() +
A1e3
– A3e1
.
+
A1e3
– A3e1
.
Отсюда следует
div
V
= (Vk,rk)
= = (V1,e1)
= (V1,e1)
![]() (V2,e2)
+
(V2,e2)
+
![]() (V3,e3)
=
(V3,e3)
=
![]() +
+
![]()
![]() +
+![]()
![]() .
.
4. Выражение ротора в сферических координатах
[e1, e2]=e3 , [e3, e1]=e2 , [e2, e3]=e1 ,
[e1,
V1]
=![]() [e1,
e2]
+
[e1,
e2]
+
![]() [e1,
e3]
=
[e1,
e3]
=
![]() e3
-
e3
-
![]() e2,
e2,
![]() [e2,
V2]
=
[e2,
V2]
=![]()
![]() = =
= =
![]()
![]() =
=
![]()
![]() ,
,
![]() [e3,
V3]
=
[e3,
V3]
=![]() [e3,
e1]
+
[e3,
e1]
+
![]() [e3,
e2]
[e3,
e2]
![]() [e3,
e1]
=
[e3,
e1]
=
=
![]() e2
e2
![]() e1
,
e1
,