

Вероятностный метод.
В вероятностных
методах изменения значений пикселей
со временем рассматриваются как
пиксельный процесс, т.е. временной ряд,
состоящий из значений интенсивности
пикселя. В произвольный момент времени
t
для каждого пикселя (x,
y)
известна его предыстория:

Изменение пикселей
фона моделируется с помощью нормально
распределенной случайной величины с
плотностью η(

где µ - математическое ожидание, σ – среднеквадратичное отклонение.
По нескольким последовательным кадрам для каждого пикселя производится оценка параметров µ и σ, а затем с помощью порогового значения определяется принадлежность пикселя к переднему плану или фону.
После начальной оценки значений параметров для каждого следующего кадра и каждого пикселя рассматривается неравенство

Если оно выполняется, то данный пиксель сегментируется в задний план, иначе – в передний.
При каждом новом кадре время вычисление значений математического ожидания и СКО увеличивается. Поэтому можно после начального вычисление значений при каждом новом кадре их обновлять:


Временная разница
Данный метод позволяет отделить передний план от фона при помощи операции попиксельного вычитания двух или более последовательных кадров. Метод временной разности хорошо определяют динамические изменения сцены, но обычно не могут выделить целиком все однородные блобов. Чаще всего данный метод используется совместно с другими методами, что позволяет достаточно устойчиво отделить передний план от фона.
Самым просто способом реализации данного метода является нахождение разности между интенсивности пикселей текущего кадра и предыдущего и сравнение его с порогом h.

Если эта величина превышает пороговое значение, то данный пиксель считается переднеплановым, иначе – фоном. Основную трудность вызывает правильный выбор порогового значения.
Другой алгоритм данного метода, более сложный по реализации, но более быстрый заключается в поблочной разности. Каждое входящие видеоизображение разбивается на блоки равного размера, в каждом из которых вычисляется среднеарифметическое значение не для всех пикселей, а лишь для некоторой части, что повышает быстроту вычислений и не сильно влияет на итоговый результат. После чего происходит вычисление разности среднеарифметических значений в блоке текущего и предыдущего кадра, и сравнивают его с пороговым значением. Данный метод позволяет частично решить проблемы первого рода.
Экспериментальные результаты.
Выделение движущихся объектов
После получения маски переднего вида необходимо на ней выделить связные части или так называемые блобы. Кроме этого решается проблема удаление не представляющих интереса областей, где произошло движение. Такой результат обычно получается вследствие шума камеры. Для решение данной проблемы необходимо выполнить следующие шаги:
Удалить не представляющие интереса пиксели,
Провести морфологическую обработку,
Выделить объект в прямоугольную рамку.
Для удаления пикселей получаемую маску переднего плана разбивают на зоны одинаково размера и в каждой зоне подсчитывается количество пикселей. Подсчитывается разница между получившимся результатом и максимальным количеством пикселей в зоне. Если данная разница больше порогового значения, то данную зону причисляют к фону, иначе – к переднему плану.
Для получения связанных областей вокруг проводят операцию дилатации. Соседние зоны для зоны, отмеченной, как передний план, тоже отмечают как передний план.
Группа зон, которые взаимосвязаны, помещаются в прямоугольную рамку. Границы рамки является крайние зоны выделенной области.

Рисунок 2 Метод Временной разницы

Рисунок 3 Метод вычитания фона
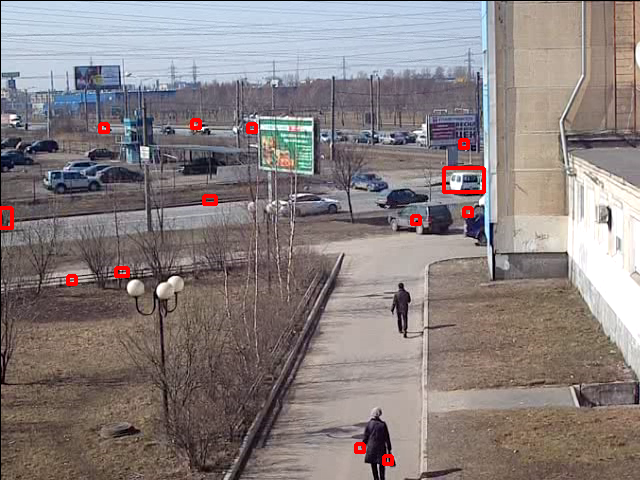
Рисунок 4 Вероятностный метод
Таблица 1. Временные характеристики.
-
Временная разница
7 миллисекунд
Вычитание фона
10 миллисекунд
Вероятностный метод
11 миллисекунд
В таблице 1 представлено время выполнение каждого из алгоритмов. Для подсчета использовался процессор Intel Pentium Dual T2390 с частотой 1.87 Гц.