

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Курский государственный технический университет
Кафедра теоретической механики и мехатроники
Математическое моделирование и исследование работы электромеханической системы
Методические указания к выполнению
расчетно-графической работы
по курсу Основы мехатроники
для студентов специальности 220401 - Мехатроника
Курск 2006
Составители: С.Ф. Яцун, Е.Н. Политов
УДК 621.01
Рецензент
Кандидат технических наук, доцент кафедры теоретической механики и мехатроники В.Я. Мищенко
Математическое моделирование и исследование работы электромеханической системы: Методические указания к выполнению расчетно-графической работы [Текст] / Курск. гос. техн. ун-т. Сост.: С.Ф. Яцун, Е.Н. Политов, Курск, 2006. 30 с.
Содержат сведения по вопросам расчёта динамики электромеханических систем, содержащих в качестве возбудителя колебаний электромагнит. Приведены схемы различных электромеханических систем, алгоритм составления системы уравнений, описывающих динамику электромеханических систем, а также подходы к решению этих систем уравнений с использованием современных вычислительных программных сред.
Методические указания соответствуют требованиям программы, утверждённой учебно-методическим объединением (УМО).
Предназначены для студентов специальности 220401 - Мехатроника всех форм обучения.
Ил. 15. Таб. 1 Прилож. 1 Библиогр.: 3 назв.
Текст печатается в авторской редакции
ИД №
Подписано в печать . Формат Печать офсетная.
Усл.печ.л. Уч.-изд.л. Тираж 100 экз. Заказ Бесплатно.
Курский государственный технический университет.
Издательско-полиграфический центр Курского государственного технического университета. 305040 Курск, ул. 50 лет Октября, 94
Содержание
Введение Задание Пример выполнения задания Расчётная схема и исходные данные Математическое описание электромеханической системы Результаты расчётов Выводы Контрольные вопросы Рекомендуемая литература Приложение |
4 5 10 10 11 18 26 27 27 28
|
Введение
В настоящее время широкое распространение получили электромеханические системы (ЭМС), предназначенные для реализации заданного движения.
Электромеханические системы состоят из механизма (рычажного, зубчатого и др.) и звена-возбудителя движения, в качестве которого может быть использован электромагнит, электропривод и др.
Расчёт динамики подобных систем является важной задачей при проектировании различных промышленных объектов.
Целью работы является исследование динамики электромеханической системы при различных режимах входного напряжения и выбор рациональных параметров питания для обеспечения требуемого закона движения механической системы.
Задание
Электромеханическая система состоит из (см. рис. 1): механизма (платформы), упругих элементов, демпферов и электромагнита. На катушку электромагнита подается напряжение питания, якорь электромагнита совершает колебательные движения с амплитудой δ.
Колеса считать сплошными однородными дисками, стержни – сплошными круглого сечения.
Механизмы расположены в вертикальной плоскости.
Другие силы сопротивления движению системы не учитываются.
Необходимые для решения данные приведены в табл.1.
Необходимо:
составить систему дифференциальных уравнений, описывающих динамику данной электромеханической системы и программу численного расчета полученной системы дифференциальных уравнений в вычислительном пакете Mathcad Professional;
исследовать поведение электромеханической системы при различных режимах управляющего воздействия, т.е. при различных законах питающего напряжения электромагнита;
подобрать рациональные параметры электромагнита (амплитуда и закон изменения), при которых механическая система адекватно «отрабатывает» заданные параметры движения по амплитуде перемещения и уровню ускорений;
подготовить отчет, к отчёту приложить листинг программы для расчёта и графики, иллюстрирующие поведение системы в различных режимах работы.
Таблица 1
Исходные данные для расчёта
Вариант |
Масса, кг |
Радиус, м |
Длина стержня, м |
Жёсткость, Н/м |
Вязкость демпфера, Н∙с/м |
Размеры электромагнита, м |
Эл. сопротивление, Ом |
Амплитуда перемещений, мм |
||
m1 |
m2 |
R |
l |
С |
α |
a |
b |
Rэл |
δ |
|
1 |
1 |
2 |
0.1 |
0.3 |
500 |
25 |
0.05 |
0.05 |
20 |
10 |
2 |
5 |
7 |
0.2 |
0.5 |
1000 |
15 |
0.03 |
0.03 |
25 |
8 |
3 |
3 |
4 |
0.3 |
0.8 |
1500 |
30 |
0.04 |
0.05 |
15 |
15 |
4 |
2 |
1 |
0.15 |
0.6 |
1250 |
20 |
0.05 |
0.04 |
20 |
5 |
5 |
0.8 |
2 |
0.25 |
0.5 |
800 |
25 |
0.02 |
0.02 |
22 |
7 |
6 |
1.2 |
2.4 |
0.5 |
1 |
1500 |
30 |
0.08 |
0.08 |
30 |
5 |
7 |
2.5 |
1 |
0.4 |
1.2 |
800 |
150 |
0.07 |
0.07 |
12 |
10 |
8 |
7 |
5 |
0.6 |
2 |
2000 |
20 |
0.1 |
0.1 |
30 |
12 |
9 |
3 |
2 |
0.3 |
0.9 |
600 |
10 |
0.02 |
0.02 |
15 |
4 |
10 |
4 |
3 |
0.25 |
0.7 |
900 |
12 |
0.03 |
0.03 |
25 |
8 |
11 |
2 |
2.5 |
0.4 |
0.9 |
1100 |
15 |
0.06 |
0.06 |
20 |
15 |
12 |
1 |
1.4 |
0.35 |
1 |
1300 |
20 |
0.05 |
0.07 |
20 |
10 |
13 |
10 |
8 |
0.4 |
1 |
1100 |
25 |
0.06 |
0.06 |
15 |
5 |
14 |
2 |
4 |
0.3 |
0.9 |
1600 |
20 |
0.05 |
0.05 |
25 |
10 |
15 |
4 |
6 |
0.6 |
1 |
2000 |
12 |
0.06 |
0.06 |
20 |
6 |
16 |
7 |
4 |
0.4 |
1.2 |
1300 |
15 |
0.07 |
0.06 |
20 |
12 |
17 |
3 |
4 |
0.2 |
0.8 |
500 |
10 |
0.04 |
0.04 |
25 |
10 |
18 |
4 |
2 |
0.25 |
0.7 |
600 |
12 |
0.035 |
0.035 |
20 |
5 |
19 |
3 |
2 |
0.3 |
0.75 |
550 |
15 |
0.04 |
0.04 |
24 |
8 |
20 |
2 |
4 |
0.4 |
1 |
500 |
10 |
0.035 |
0.035 |
22 |
5 |
|
|
1 |
2 |
|
|
3 |
4 |
|
|
5 |
6 |
|
|
7 |
8 |
|
|
9 |
10 |
|
|
11 |
12 |
|
|
13 |
14 |
|
|
15 |
16 |
|
|
17 |
18 |
|
r1 = R r2= 2R/3 |
19 |
20 |
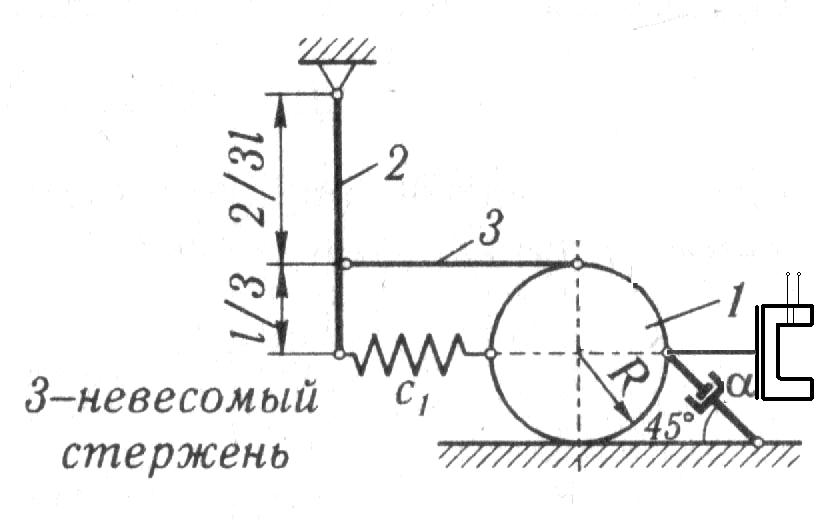
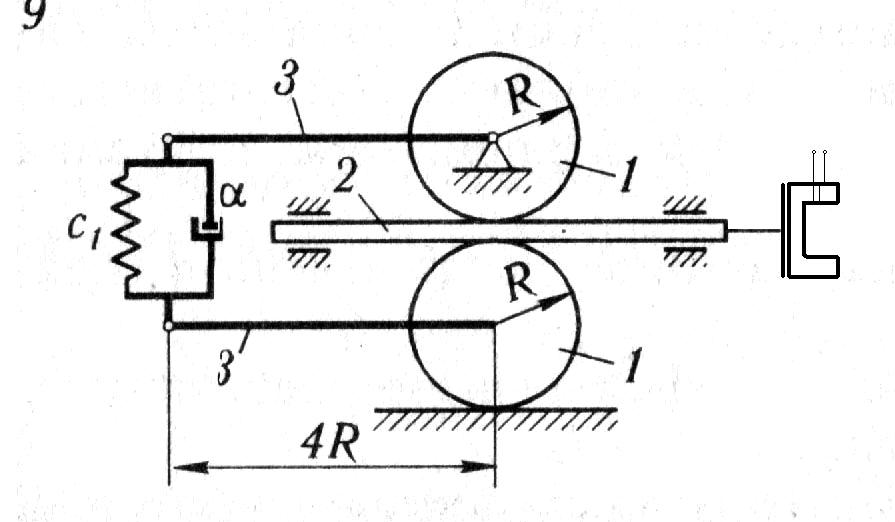
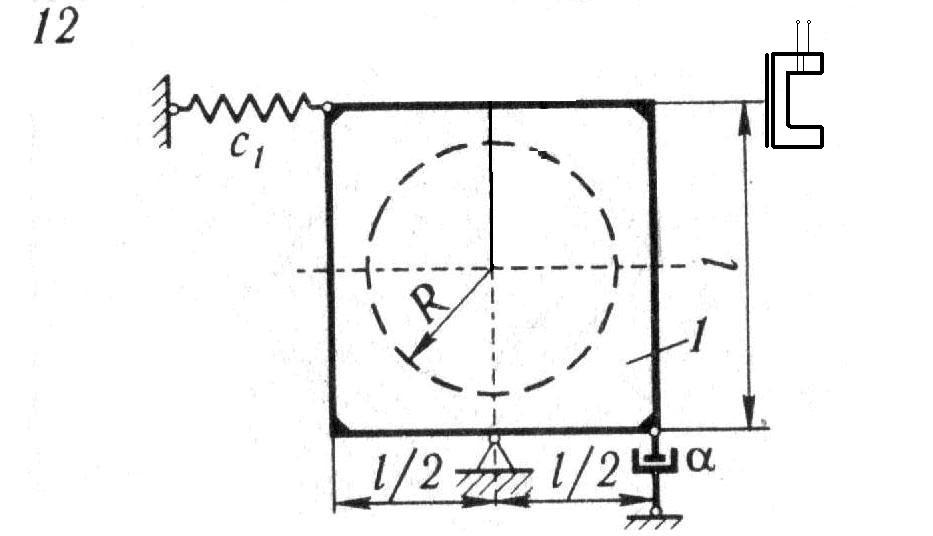

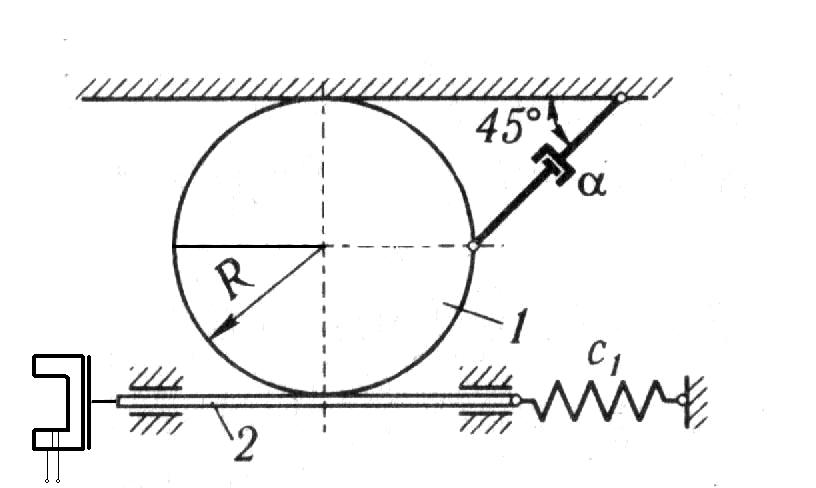
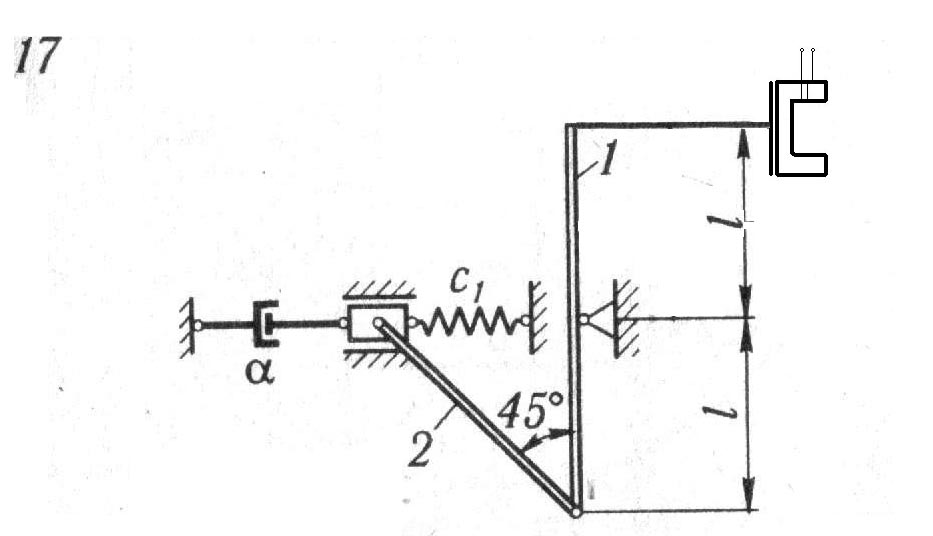
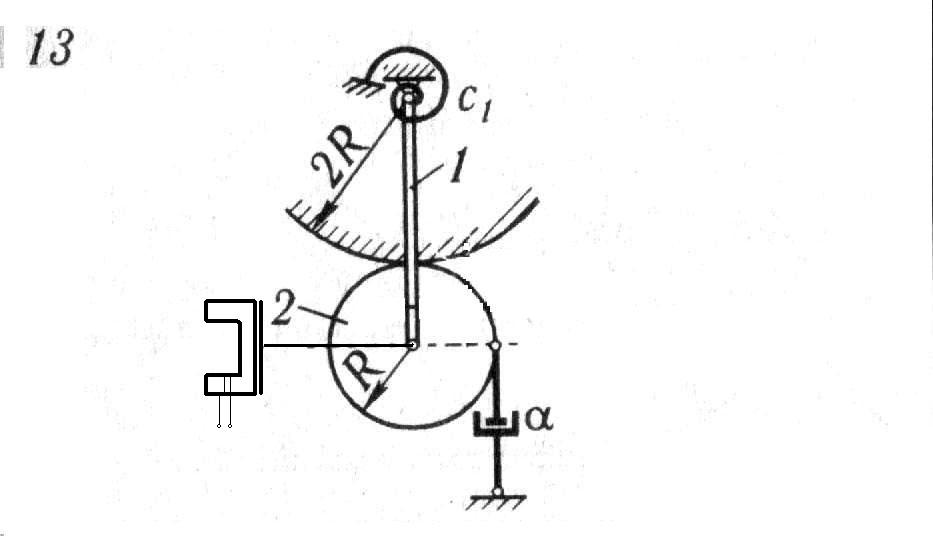

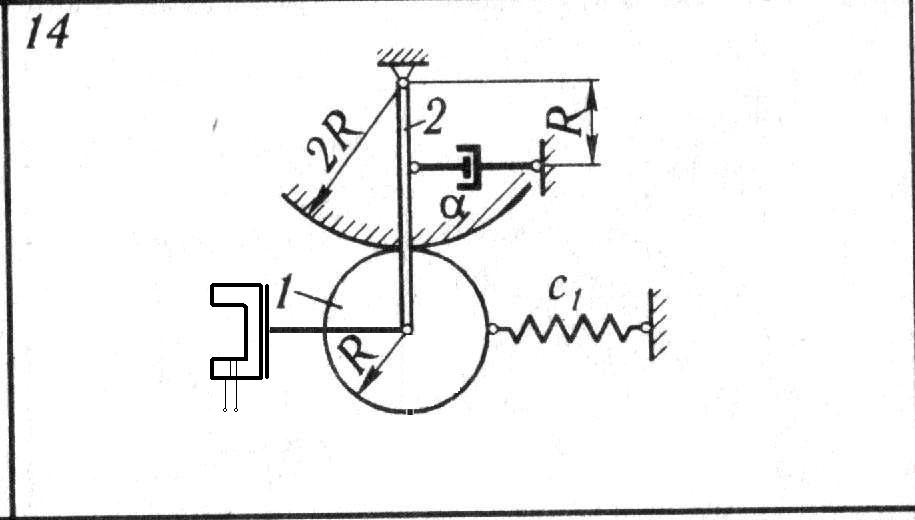
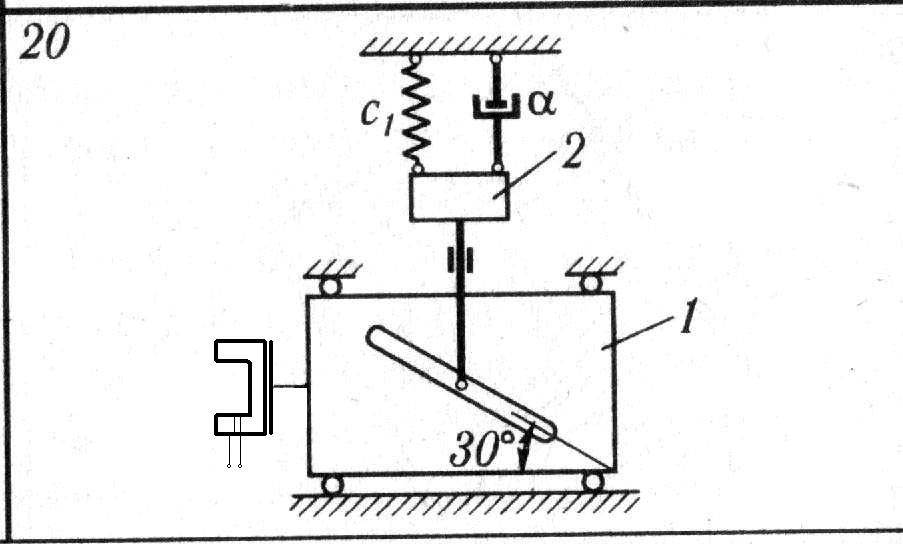
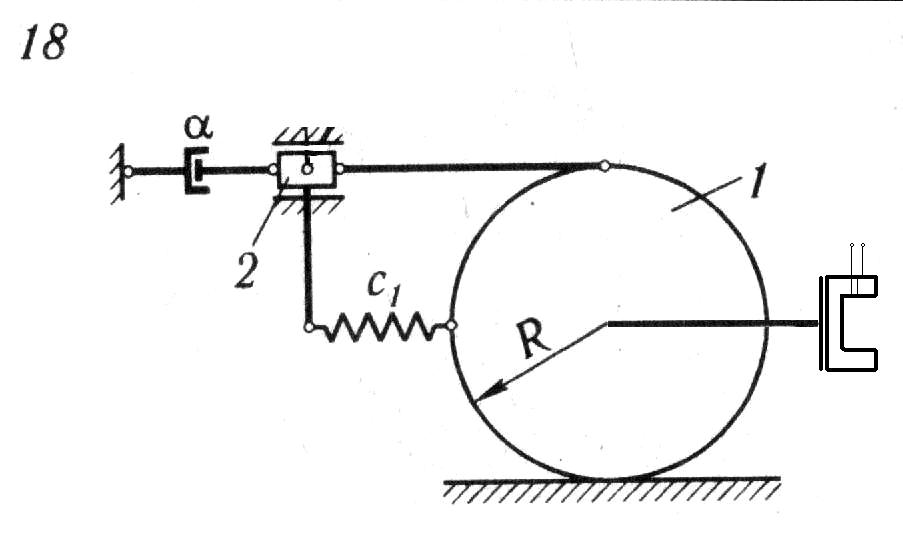
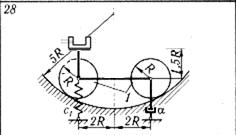
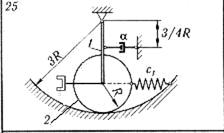
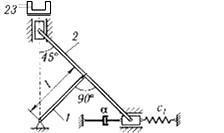
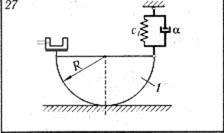
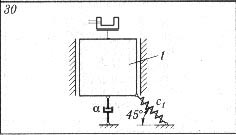

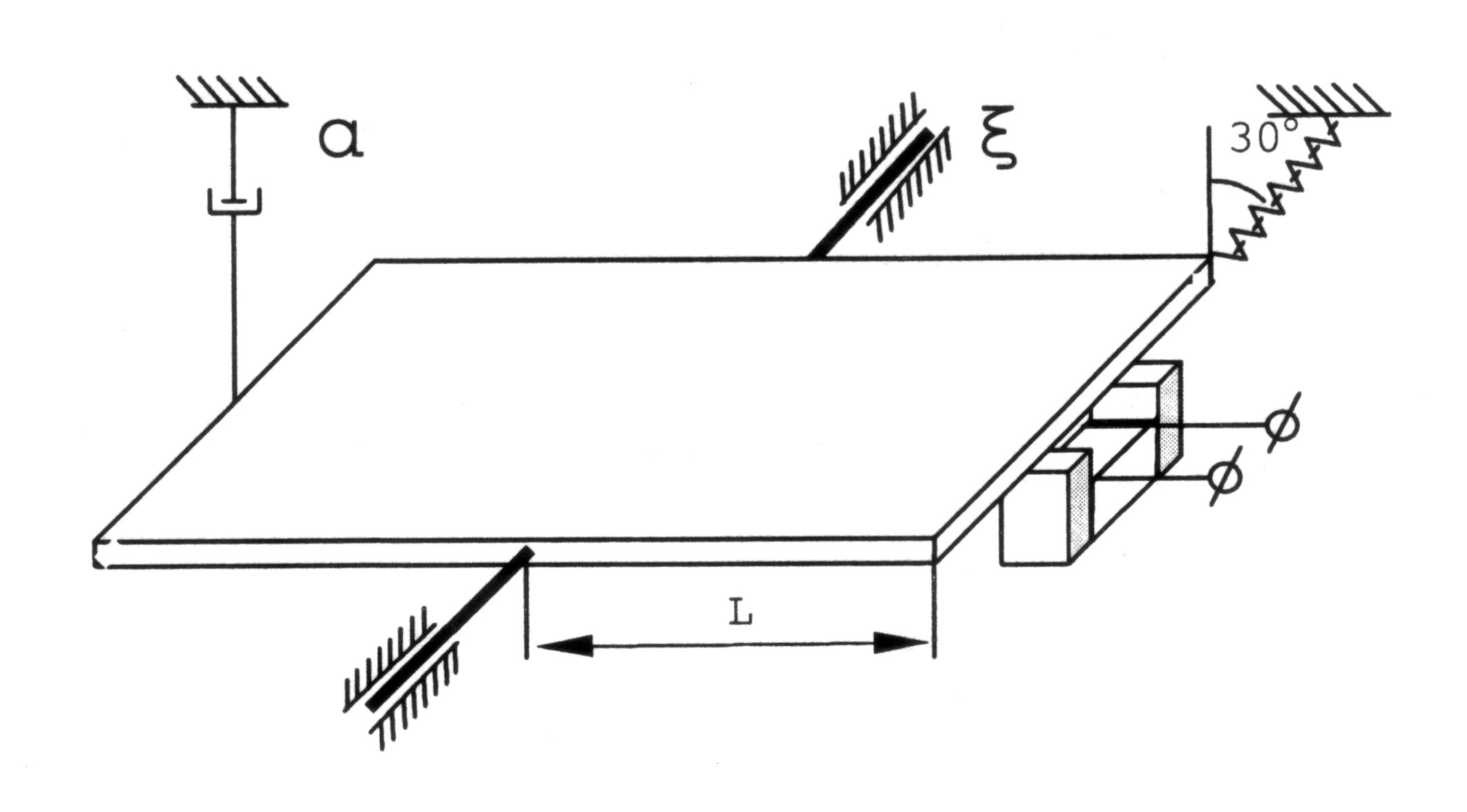
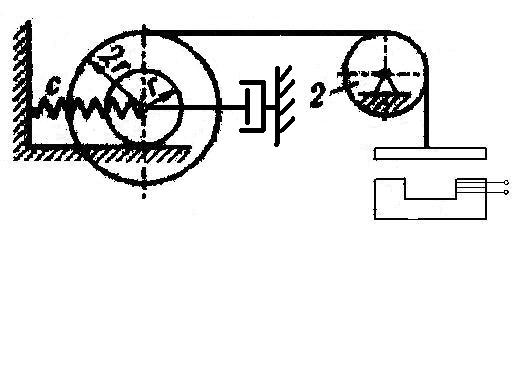
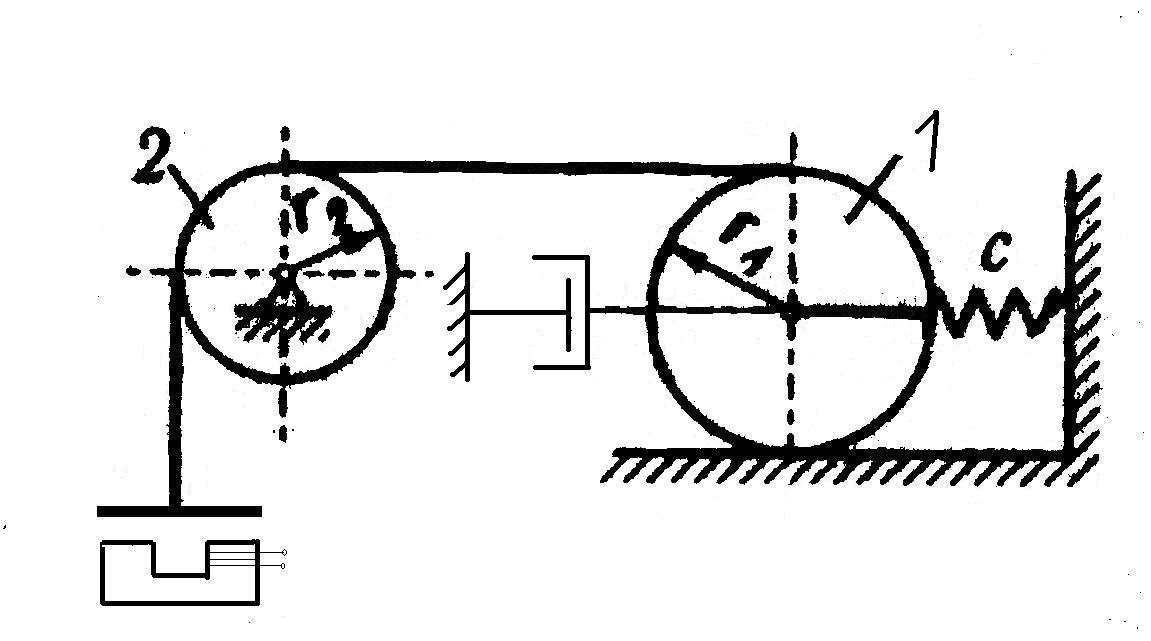
Рис. 1 Схемы электромеханических систем