

Задача о назначениях
Пусть имеется n видов станков различных типов, которые требуется распределить между n видами работ. Известен ожидаемый эффект су от использования i-го вида оборудования наj-м виде работ, измеряемый, например, количеством обрабатываемых деталей. Задача состоит в таком назначении станков на виды работ (по одному станку на каждый вид работы), чтобы суммарный эффект от использования всех станков был максимален (например, число обрабатываемых деталей).
Математическая модель. Введем переменные ху, определяемые формулой
Г 1, если -ijй станок предназначен для-го вида работ; х.. = <
10 — в противном случае.
14
Необходимо найти такие значения переменных xij, которые будут мак-
п п
симизировать суммарный эффект, т. е. max ^ c ijxij при условиях:
i=i j=\
1) ∑x: = 1 (для каждого вида работы предназначен только один станок);
2) ∑ xij = 1 (каждый станок предназначается только на одну работу).
К рассмотренным выше основным типам задач линейного программирования можно свести многие их разновидности.
Постановка задачи и основные определения злп
В общем виде задачу линейного программирования (ЗЛП) можно записать следующим образом: найти
max / (jcj, .. .,хп ) = max ctjc = max ^ CjXj = max^JCj + c2x2 н 1- cnxn)
или
п
j = min()c1x1 + c2x2

 при
ограничениях Ax
= ∑ aijxj
где
n
1 ≤n.
при
ограничениях Ax
= ∑ aijxj
где
n
1 ≤n.
bt i = \,m, x>0 j =
Здесь
xт= (x1, x2 , … , xn) — n-мерный вектор переменных (план задачи),
cт= (c1, c2 ,…, cn) — n-мерный вектор коэффициентов целевой функции,
А = {aij } \ — матрица коэффициентов левой части системы
ограничений,
15
bт= (b1,b2 ,…, bm) — вектор коэффициентов правой части системы ограничений.
Формы записи общей злп
Различают две основные формы записи ЗЛП: стандартная и каноническая. Будем рассматривать в качестве стандартной ЗЛП
m ax
∑ CjXj
,
при
ограничениях ∑ aijxj
≤bi,
i = 1,m, хj ≥ 0,
j=
1,
n,
ax
∑ CjXj
,
при
ограничениях ∑ aijxj
≤bi,
i = 1,m, хj ≥ 0,
j=
1,
n,
каноническая ЗЛП записывается так:
п п
max∑ cjxj , при ограничениях ∑a ijxj =bi,i = 1,m, хj ≥ 0, j = 1,n.
От задачи на максимум можно всегда осуществить переход к задаче на минимум и наоборот. Если целевая функция сводится к нахождению
minf= c1x1 + c2x2 + …+ cnxn, то можно перейти к задаче нахождения
maxf1 = -f= -c1x1- c2x2 - –… - cnxn, поскольку
minf= -max (-f).
Переход от общей ЗЛП к стандартной осуществляется следующим образом.
Ограничение-неравенство ЗЛП, имеющее вид «≥», можно преобразо вать к неравенству вида «≤», умножив обе части исходного неравенст ва на «-1».
Ограничение-равенство
16
ai1x1 + ai2x2 +…+ ainxn=bi можно записать в виде двух неравенств:
паХ2
3. Если переменная хk не удовлетворяет условию неотрицательности, т. е.:
а) хk≤ 0, то заменим ее на переменную yk≥ 0 такую, что хk= —y k;
б) хk — не определена, то заменим ее на разность двух переменных
Щ > О и vk ≥ 0, приняв xk = Щ - vk .
Переход от стандартной ЗЛП к канонической осуществляется путем преобразования ограничений — неравенства вида «≤» к строгим равенствам добавлением к левой части неравенства дополнительной переменной, т. е.
ai1x1 + ai2x2 +... + ainxn ≤ bi преобразуется в неравенство
ai1x1 + ai2x2 +... + ainxn + xn+1 = b{ (xn+l ≥ 0).
Число вводимых дополнительных неотрицательных переменных при преобразовании ограничений-неравенств в ограничения-равенства равно числу преобразуемых неравенств.
Вводимые дополнительные переменные имеют вполне определенный экономический смысл. Так, если в ограничениях исходной стандартной ЗЛП отражается расход и наличие производственных ресурсов, то числовое значение дополнительной переменной в плане задачи, записанной в канонической форме, равно объему используемого соответствующего ресурса. Обратный переход от канонической к стандартной форме записи ЗЛП проводится по правилам перехода от общей ЗЛП к стандартной.
Данные формы записи ЗЛП и правила перехода от одной формы к другой имеют практическое значение при решении ЗЛП различными методами, рассматриваемыми ниже. Далее введем основные определения, связанные с решением ЗЛП.
Всякое неотрицательное решение системы ограничений задачи линейного программирования называется планом.
17
Будем называть любой план задачи линейного программирования допустимым, если он удовлетворяет условиям ограничений задачи.
Допустимый план будем называть опорным, если в нем отличны от нуля не более m+n-1 компонент, а остальные —равны нулю.
Если в опорном плане число отличных от нуля компонент равно в точности n+m-1, то план является невырожденным, иначе — вырожденным.
Допустимый план, при котором целевая функция задачи линейного программирования принимает свое минимальное значение, называется оптимальным планом.
18
Лекция 1.1.3. Графический метод нахождения решения линейных
моделей. Геометрическая интерпретация решения.
Метод прямого перебора
Графический метод решения ЗЛП
Когда ЗЛП содержит всего две переменные, нетрудно получить ее геометрическую интерпретацию и решить задачу графически. Случай двух переменных не имеет особого практического значения, однако его рассмотрение делает ясными отдельные свойства задачи ЛП, а также геометрический смысл методов ее решения.
Найдем решение задачи, состоящей в определении максимального значения функции
f= c1x1 + c2x2 →max (1.1)
при условиях
a i1x 1+ ai2x2≤bi, i = 1,m, {i.2)
x ≥
0
/ = 1,2. Г1
34»
≥
0
/ = 1,2. Г1
34»
Каждое из неравенств системы ограничений (1.2) геометрически определяет полуплоскость, граница которой задается прямой ац х\ + ai2 x2 = bi (i = 1,m). Чтобы найти, какую именно из двух полуплоскостей определяет
д анное неравенство апхх + ai2x2 ≤ bi (i = 1,m), достаточно подставить в него координаты любой точки, не лежащей на граничной прямой. Если при этом неравенство будет выполняться, то искомая полуплоскость та, в которой лежит взятая точка, а если нет, то противоположная ей.
В том случае, если система неравенств (1.2), (1.3) совместна, область ее решений есть множество точек, принадлежащих всем указанным полуплоскостям. Так как множество точек пересечения данных полуплоскостей — выпуклое, то областью допустимых решений задачи (1.1)—(1.3) является выпуклое множество, которое называется многоугольником решений.
ЗЛП состоит в нахождении такой точки многоугольника решений, где целевая функция принимает максимальное решение. Эта точка существует
19
тогда, когда многоугольник решений не пуст и на нем целевая функция ограничена сверху (для задачи на максимум). Тогда необходимо построить линию уровня c1x1 + c2x2 = h (где h — произвольная константа), затем эта линия передвигается в направлении вектора ст ={с\, c2).
Вектор сТ =(cj; c2) называется градиентом целевой функции или вектором роста функции, и показывает направление ее роста (соответственно, вектор сТ = (- Си - c2) показывает направление уменьшения значений целевой функции). Перемещение осуществляется до тех пор, пока линия не пройдет через последнюю ее общую точку с многоугольником решений. Координаты указанной точки и определяют оптимальный план данной задачи.
При нахождении решения задачи ЛП графически могут встретиться случаи, когда:
а) целевая функция принимает максимальное значение в единственной точке допустимого множества (единственное решение);
б) целевая функция принимает максимальное значение в любой точке от резка (если линия уровня совпадает с ограничением, тогда имеем слу чай бесконечного множества решений);
в) целевая функция может быть не ограничена на множестве допустимых решений (т. е.fmax = +∞ — это также случай бесконечного множества решений);
г) решения задачи (1.1)—(1.3) не существует, поскольку система ограни чений этой задачи несовместна.
Нахождение минимального значения линейной функции при данной системе ограничений отличается от нахождения ее максимального значения при тех же ограничениях лишь тем, что линия уровня c1 x1 +c2 x2 = h пере-
-*-Т
двигается не в направлении вектора с =(cl; c2), а в противоположном.
Алгоритм графического метода решения ЗЛП включает в себя, таким образом, следующие этапы.
Построение прямых, уравнения которых получаются путем замены в ограничениях (1.2), (1.3) знаков на равенства.
Нахождение полуплоскостей, определяемых каждым ограничением за дачи.
20
Определение многоугольника решений.
Построение вектора ст ={с\, c2).
Построение прямой c1x1 +c2x2 = h.
Перемещение прямой c1 x1 +c2x2 = h в направлении роста вектора с , в результате этого либо определяется точка (точки), в которой целевая функция принимает максимальное значение, либо устанавливается не ограниченность функции сверху на множестве допустимых решений.
Определение координат точки максимума функции и значения в этой
точке.
Пример. Для производства двух видов изделий А и В предприятие использует сырье двух видов. Нормы расхода сырья каждого вида на изготовление единицы продукции данного вида, прибыль от реализации одного изделия каждого вида и общее количество сырья каждого вида приведены в табл. 1.1.
Таблица 1.1
Вид сырья |
Нормы расхода сырья на одно изделие, кг |
Общее количество сырья, кг |
|
А |
В |
||
I II |
1 1 |
1 4 |
30 84 |
Прибыль от реализации одного изделия, руб. |
3 |
4 |
— |
Решение. Построим экономико-математическую модель задачи. Пусть jci — количество изделий типа А, х2 — количество изделий типа В. Тогда прибыль от реализации можно записать как 3 х1 + 4 х2 —→ max. Ограничения по использованию сырья будут выглядеть следующим образом:
![]()
21
> 0, х2 ≥ 0, так как объем производства не может быть отрицательным. Строим график (рис. 1.1).
 О
О
10 20
^0^
405060 70 80
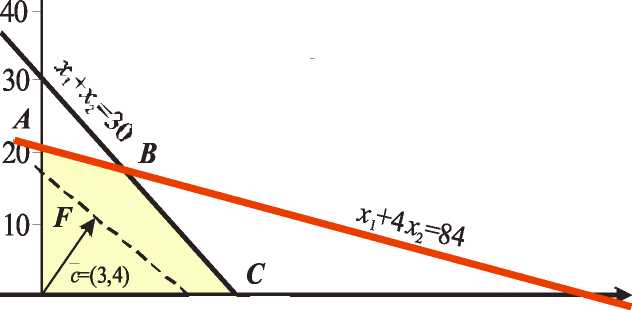
Рис. 1.1. Графическое решение к примеру
Прямая х1 + х2 = 30 проходит через точки (0; 30) и (30; 0). Прямая jci + 4 х2 = 84 проходит через точки (0; 21) и (84; 0).
Полуплоскости, определяемые неравенствами задачи, находят путем подстановки произвольной точки плоскости, например точки (0; 0) в неравенства. В данной задаче точка (0; 0) удовлетворяет обоим нера венствам, следовательно, полуплоскости лежат в той стороне от гра ничных прямых, где находится точка (0; 0). Ограничения х1 ≥ 0, х2 ≥ 0 определяют первый координатный угол в декартовой системе коорди нат.
Многоугольником допустимых решений является четырехугольник О АВС. Строим вектор ст=(3; 4) или совпадающий с ним по направле нию ст=(30;40).
Строим прямую 3 х1 + 4х2= 12, которая проходит через точки (0; 3) и (4; 0).
Передвигаем прямую F в направлении вектора с. Последней общей точкой с многоугольником решений является точка В, значит, это и есть точка максимума.
22
6. Определяем координаты точки В. Для этого необходимо решить систему из двух уравнений
х\ 12+ = 30, 484.
Решением системы является точка х1* =12, х2 = 18. Следовательно, если предприятие изготовит 12 изделий типа А и 18 изделий типа В, то получит прибыль, равную 3·12 + 4·18 = 108 (руб.).