

14 Алгоритмы формирования псевдослучайных чисел на эвм.
Программнный
датчик СВ-программа, служащая для
имитации на ЭВМ реализаций
![]() базовой СВ. В общем виде функционирование
датчика СВ описывается
базовой СВ. В общем виде функционирование
датчика СВ описывается
формулой:
![]() (1)
(1)
где
![]() -
выходная величина датчика в момент
времени t
(случайное число),
-
выходная величина датчика в момент
времени t
(случайное число),
![]() - используемые при формировании
предыдущие
значения СВ.
- используемые при формировании
предыдущие
значения СВ.
Значение
![]() фиксируется
заранее и называется стартовым числом
(возможно случайным).Формула (1)
рекуррентная, позволяет получить
последовательность псевдослучайных
чисел. Использован термин «псевдослучайные
числа», такими могут быть:
фиксируется
заранее и называется стартовым числом
(возможно случайным).Формула (1)
рекуррентная, позволяет получить
последовательность псевдослучайных
чисел. Использован термин «псевдослучайные
числа», такими могут быть:
1)числа получены по известному детерминированному закону;Методы построения програмнных датчиков СВ:
1.Мультипликативный конгруэнтный метод (метод вычетов).
Согласно
этому методу псевдослучайная
последовательность вычисляется по
рекуррентным формулам :![]()
где
![]() -параметры
програмнного датчика(натуральные
числа),
-параметры
програмнного датчика(натуральные
числа),
![]() -
начальный элемент последовательности,М-сколь
угодно большое число,
-
начальный элемент последовательности,М-сколь
угодно большое число,
![]() -стартовое
значение.Операция у=(z)mod
M
означает вычет числа z
по модулю М: у= z-М[z/M],
где [.]-операция целой части числа.
-стартовое
значение.Операция у=(z)mod
M
означает вычет числа z
по модулю М: у= z-М[z/M],
где [.]-операция целой части числа.
Параметры могут быть выбраны в соответствии со значениями в таблице.
q |
M |
|
|
32 |
|
|
65539 |
где q-разрядность ЭВМ.
1.Метод
использующий линейные смешанные
формулы:![]()
![]()
Параметры датчика:р-порядок,
![]() -стартовое
значение
-стартовое
значение
![]() -множители,с-приращение,М-достаточно
большое число.
-множители,с-приращение,М-достаточно
большое число.
1.Метод
использующий линейные рекуррентные
формулы:
![]() ,
,
где М- достаточно большое число(М=29)
![]() -задаваемые
значения.
-задаваемые
значения.
17).Понятие модельного времени при имитационном моделировании. Способы формирования модельного времени. Принцип ∆t и ∆z.
Принцип Δt
1.Ось времени разбывается на равные временные интервалы (такты) длительностью Δt. МВ может принимать только дискретные значения, кратные Δt: Δt, 2Δt, 3Δt, … т.о. моделирующая программа формирует модельное время в соответствивии с формулой:
![]() Реальный
объект прогнозирования событияначинается
Δt
Реальный
объект прогнозирования событияначинается
Δt
Для управления модельным временем в программе создается переменная – счетчик модельного времени Т. который считает количество вынашенных тактов (в начале моделирования Т=0; затем Т=Т+1) При этом Т изменяется от 0 до Т max
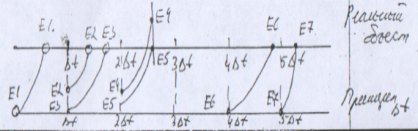
Временные отметки (моменты времени моделирования) не привязаны к появлению реальных событий на объекте. Реальные события сдвигается к левой границе такта, в пределах которого оно поделено. Схема приязывания событий к началу тактов
Схема привязывания собития к началу тактов
Принцип Δz
Особенность – прогнозирования момента времени наступления некоторого события в системе.
1.Перед началом моделирования счетчик модельного времени сбрасывается в 0 (tm=0), задается начальное состояние системы (z0)
2.Затем прогнозируется появление следующего события z1 и определения момента времени tm, для этого события
3.Текущему времени присваивается значение tm1 (tm =tm1)
4.Имитируется реакция системы на событие Е1 (появление новых событий (события Е2 и tm =tm2))
5.Шкала модельного времени получается неравномерной
т. е. в методе Δz на основе текущего события прогнозируется следующее возможные (прогнозируется появление одного из слудеющих возможных событий)
схема моделирования (определение модельного времени)
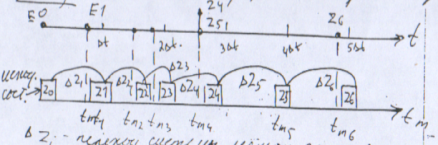
Δz- переход системы между состояниями