

2.5. Порядок выполнения работы
Массив данных, из которого производится чтение в Блоке 1 (рис. 2.3), был сформирован при стендовых испытаниях ИБ на ЛГ (ИБ находился на румбе 71 град., запись осуществлялась в течение 6 ч с частотой 200 Гц, dt=dT=0.005 c).
Начальная выставка и формирование режима пространственного гироазимута
Для реализации режима начальной выставки,
используя информацию от GPS, в Блоке6
(рис. 2.3) организуются скоростные и
позиционные измерения (Z_gps=[![]() ],
согласно (2.2), (2.3)), а также позиционные
измерения (по высоте) (Z_h, согласно
(2.6)). После этого, согласно выражению
(2.7), формируются сигналы демпфирования
(KFOr=[
],
согласно (2.2), (2.3)), а также позиционные
измерения (по высоте) (Z_h, согласно
(2.6)). После этого, согласно выражению
(2.7), формируются сигналы демпфирования
(KFOr=[![]() ],
KFDV=[
],
KFDV=[![]() ])
и коррекции (KFDFDL=[
])
и коррекции (KFDFDL=[![]() ],
KFDh=
],
KFDh=![]() ).
).
Для реализации режима пространственного гироазимута происходит “разрыв” внутренних связей алгоритма БИНС, используя переключатели в Блоках 4, 5 (рис. 2.3).
Действия оператора:
Запустить программу Matlab (ярлык программы находится на «Панели задач»), в окне «Current Directory» указать путь к рабочей папке d:\student\Emlib\Prog_Lab_EP_1\.
Открыть файл read_1.m (для этого нажать ) и задать 2-х часовой массив данных.
n=1440000;
Загрузить файл read_1.m в рабочую область Workspace Matlab, нажав кнопки DebugRun.
Открыть файл BINS_LG_SRdr_o_Br_Vidat_kz.m и обнулить начальные значения погрешностей БИНС (2.9) в момент времени t=0:
погрешности моделировании горизонтной системы координат с географической ориентацией осей (
 )
)
Alphao=0*0.3*pi/180;
Betao=0*0.1*pi/180;
Gammao=0*-0.1*pi/180;
погрешности в выработке составляющих вектора линейной скорости (
 )
)
DVEo=0*0.2;
DVNo=0*-0.2;
DVHo=0*0.1;
погрешности в выработке географических широты, долготы и высоты места (
 );
);
DFio=0*30*5e-6/30;
DLamo=0*-30*5e-6/30;
Dho=0*1;
Согласно выражению (2.8) задать значения
коэффициентов
![]() (k1),
(k1),
![]() (k2) и
(k2) и
![]() (kz) для демпфирующих и корректирующих
сигналов в обратных связях:
(kz) для демпфирующих и корректирующих
сигналов в обратных связях:
k1=(Om_v^2-(go/R))/go; Znu=1.1;
k2=2*Znu*Om_v;
kz=0.1;
где
Om_v
частота
колебаний в демпфируемом контуре
вертикали
![]() ;
Znu
относительный
коэффициент демпфирования
;
Znu
относительный
коэффициент демпфирования
![]() .
.
Загрузить файл BINS_LG_SRdr_o_Br_Vidat_kz.m в рабочую область Workspace Matlab, нажав кнопки DebugRun.
Загрузить Simulink (для этого на панели инструментов Matlab нажать
 ).
Открыть файл BINS_LG_SRdr_o_Br_Vi_kz1.mdl
(для этого
на панели
инструментов Simulink
Library
Browser
нажать
).
).
Открыть файл BINS_LG_SRdr_o_Br_Vi_kz1.mdl
(для этого
на панели
инструментов Simulink
Library
Browser
нажать
).Настроить алгоритм для реализации режима начальной выставки:
Подключить ключами №1 и №5 (рис. 2.3) демпфирующие (FKDV; FKOr) и ключами №2 и №3 корректирующие (FKDFDL; FKDh) сигналы в обратных связях;
Переключить формирование вектора Omh=[OmE;OmN;OmH] для задачи ориентации по данным БИНС (задачи преобразования сигналов акселерометров на навигационные оси и первого их интегрирования). Для этого установить ключ №4 (рис. 2.3) в ВЕРХНЕЕ!!! положение.
В Блоке 8.1 и 8.2 (рис. 2.3) изменить названия file**.mat (в блоке “To File” задать имя файла Or3a.mat, при этом в нем установить значение параметра Decimation=1;, в “To File 1” DV3a.mat и в “To File 2” DS3a.mat).
Указать в меню настроек Simulation Simulation Parameters (рис.2.4) значение параметра stop time равное 5400 с, а также дискретность (dt) и численный алгоритм (Euler) интегрирования.
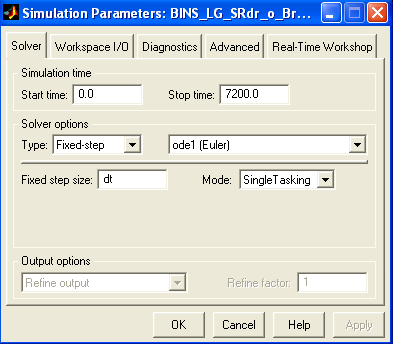
Рис. 2.4.
Запустить процесс обработки массива данных, нажав кнопки SimulationStart (или кнопку
 на панели инструментов).
на панели инструментов).
Через 1800 секунд (время отображается в правом нижнем углу), НЕ ОСТАНАВЛИВАЯ работы алгоритма, перейти в режим пространственного гироазимута:
Отключить ключами №1 и №5 (рис. 2.3) демпфирующие (FKDV; FKOr) и ключом №2 корректирующий сигнал в обратной связи (FKDFDL).
ВНИМАНИЕ! Сигнал FKDh в обратной связи НЕ ОТКЛЮЧАТЬ;
Переключить формирование вектора Omh=[OmE;OmN;OmH] для задачи ориентации по данным эталонной информации (GPS) о составляющих вектора линейной скорости и широте места (подать выходной сигнал Блока 5 на вход Блока 2.1 (рис. 2.3), для этого установить ключ №4 в НИЖНЕЕ!!! положение).
После окончания моделирования построить с использованием программы plot_Or_a.m по значениям, записанным в file: Or3a.mat, графики погрешностей вычисления параметров ориентации объекта и провести их анализ.
Загрузить в рабочую область Workspace Matlab файл Or_dat1.m и оценить смещения нулей дрейфов ИБ на ЛГ, как коэффициентов при линейных членах аппроксимирующего полинома на интервале времени 3600 с .
Примечание (Or_dat1.m):
В программе используются функции
pi=polyfit(t',yi,2); (i=1…7)
fi=polyval(pi,t');
plot(t,yi,t, fi');
пакета Matlab для аппроксимации yi (Δz (1.3)). Функция polyfit(t',yi,2) возвращает вектор коэффициентов аппроксимирующего полинома 2-й степени (1.3) (при аппроксимации используется метод наименьших квадратов). Результатом является вектор-строка pi, содержащий три коэффициента полинома в порядке уменьшения степеней.
Поэтому, если в качестве Δz принять изменения погрешностей ΔK, ΔA(Δθ), ΔB(Δψ) параметров ориентации, то вторые коэффициенты полученных полиномов pi будут характеризовать смещения нулей дрейфов ИБ на ЛГ.
Функция polyval(pi,t') вместе с функцией plot(t,yi,t, fi') обеспечивают построение графика исходных данных и аппроксимирующей кривой.
Оценка
дрейфов ИБ
(размерность
в
![]() или
или
![]() )
осуществляется на интервале времени
проведения режима
пространственного гироазимута
(1-го часа). Поэтому в тексте программы
Or_dat1.m
значения переменных DK,
DTeta,
DPsi
надо умножить на 60
(т.к. в f.mat
запись погрешностей производится в
угл. мин) и установить следующее значение
параметра
)
осуществляется на интервале времени
проведения режима
пространственного гироазимута
(1-го часа). Поэтому в тексте программы
Or_dat1.m
значения переменных DK,
DTeta,
DPsi
надо умножить на 60
(т.к. в f.mat
запись погрешностей производится в
угл. мин) и установить следующее значение
параметра
n0=360000;
(если режим начальной выставки происходил в течение 1800 c, то установить в программе Or_dat1.m: - значение параметра no=(1800с/0.005с)=360000;. если режим начальной выставки происходил в течение m cек, то значение параметра no=m/dT).