

В общем виде погрешности чэ могут быть описаны следующими выражениями:
![]() (1.1)
(1.1)
где
![]() выходные сигналы
ЧЭ, [В];
выходные сигналы
ЧЭ, [В];
![]() масштабные
коэффициенты (
масштабные
коэффициенты (![]() );
);![]()
погрешности смещения нулей ЧЭ.
погрешности смещения нулей ЧЭ.
Способ оценки смещений нулей (калибровка) ЧЭ ИБ БИИМ в общепринятом понимании (по величине вектора ускорения силы тяжести для акселерометров и значениям вектора угловой скорости вращения ИБ в соответствующем диапазоне, формируемым с помощью специальных стендов для ДУС) предполагает использование как делительной головки с специальным кронштейном, так и динамических стендов, позволяющих производить последовательные развороты ИБ БИИМ вокруг трех взаимно ортогональных осей. Это позволяет оценить не только , но и погрешности их масштабных коэффициентов и неортогональности измерительных осей ИБ.
В
данной работе рассматриваются способы
оценки
![]() и
и
![]() ,
где в качестве эталонных данных
используются значения вектора угловой
скорости суточного вращения Земли и
ускорения силы тяжести. Для этого систему
координат, связанную с ИБ (Oxbybzb)
совмещают с географическим сопровождающим
трехгранником (OENH),
т.е. углы ориентации: курс K,
дифферент ψ и крен θ равны нулю. Для
этого случая справедливы следующие
системы уравнений, описывающие проекции
вектора абсолютной угловой скорости и
ускорения на оси Oxyz
,
где в качестве эталонных данных
используются значения вектора угловой
скорости суточного вращения Земли и
ускорения силы тяжести. Для этого систему
координат, связанную с ИБ (Oxbybzb)
совмещают с географическим сопровождающим
трехгранником (OENH),
т.е. углы ориентации: курс K,
дифферент ψ и крен θ равны нулю. Для
этого случая справедливы следующие
системы уравнений, описывающие проекции
вектора абсолютной угловой скорости и
ускорения на оси Oxyz
![]()
![]() (1.2)
(1.2)
где Ω угловая скорость вращения Земли; φ широта места; g величина вектора ускорения силы тяжести (g = 9.78 м/с2)
Соответственно,
если из показаний ЧЭ ИБ исключить
составляющие, обусловленные проекциями
вектора
![]() (для акселерометров) и вектора
(для акселерометров) и вектора
![]() (для ДУСов), то становится возможной
оценка погрешностей нулей. При длительности
реализации, не превышающей 1 часа,
погрешность ЧЭ ИБ может быть аппроксимирована
полиномом 2-й степени
(для ДУСов), то становится возможной
оценка погрешностей нулей. При длительности
реализации, не превышающей 1 часа,
погрешность ЧЭ ИБ может быть аппроксимирована
полиномом 2-й степени
![]() , (1.3)
, (1.3)
где
под
![]() имеются ввиду производимые измерения
согласно (1.1);
имеются ввиду производимые измерения
согласно (1.1);
![]()
оценка величины смещения нуля ЧЭ, а
оценка величины смещения нуля ЧЭ, а
![]() и
и
![]() характеризуют изменчивость результатов
измерения
и
на интервале записи данных, обусловленную
шумами ЧЭ (т.к. ИБ неподвижен во время
записи данных).
характеризуют изменчивость результатов
измерения
и
на интервале записи данных, обусловленную
шумами ЧЭ (т.к. ИБ неподвижен во время
записи данных).
Алгоритм задачи «грубой» начальной выставки реализуется в случае неподвижного объекта. Тогда угловое положение объекта относительно горизонта может быть получено по показаниям акселерометров, которые описываются следующей системой уравнений
![]()
откуда
![]() . (1.4.)
. (1.4.)
Информация
об углах ψ и θ дает возможность сформировать
матрицу
![]() перехода от осей объекта к горизонтной
системе координат, связанной с курсом
объекта (EkNkHk)
перехода от осей объекта к горизонтной
системе координат, связанной с курсом
объекта (EkNkHk)
![]() ,
,
где

В результате становится возможным определение проекций вектора абсолютной угловой скорости ИБ на оси EkNkHk
 .
.
Так как для неподвижного (относительно Земли) основания
![]()
то величина курса составит
 (1.5.)
(1.5.)
Описание лабораторной установки
Описание измерительного модуля на ДНГ
ИМ выполнен в виде блока (рис. 1.1), включающего в себя набор миниатюрных гироскопов и акселерометров с обеспечивающей аналоговой электроникой. На выходе ИМ вырабатываются информационные сигналы в виде напряжения постоянного тока, которые соответствуют трем составляющим угловой скорости и трем составляющим линейного ускорения.
К онструкция
ИМ на ДНГ, представленного на рис. 1.1,
состоит из двух корпусов
внешнего и внутреннего, выполненных
из алюминиевого сплава.
онструкция
ИМ на ДНГ, представленного на рис. 1.1,
состоит из двух корпусов
внешнего и внутреннего, выполненных
из алюминиевого сплава.
На внутреннем корпусе размещены: два роторных вибрационных гироскопа РВГ (поз.1), три акселерометра АК-5 (поз.2), два устройства обратной связи УОС РВГ, плата питания и управления ППУ.
Крутизна выходного сигнала:
по угловой скорости 88,9 мВ/град./с;
по линейному ускорению 1600 мВ/g.
Диапазон измерения:
угловой скорости +90 град./с;
линейного ускорения +5 g.
На внешнем корпусе ИМ установлены два разъема: вилка СНЦ23-19/22В-1-В, предназначенная для подключения источников питания, и вилка DS37L, предназначенная для передачи выходных сигналов в вычислитель БИИМ.
Внутренний корпус соединен с внешним через три теплоизоляционные шайбы. Взаимная выставка корпусов производится с помощью двух штифтов, запрессованных в наружный корпус, и отверстия и паза во внутреннем корпусе.
Наружный корпус закрывается кожухом.
Измерительный модуль спроектирован в объеме 1620 см3 . При этом объем датчиков (РВГ, АК5) не превышает 72 см3, объем электронных устройств ДУС РВГ-503 см3, объем системы термостатирования СТС - 175см3, объем корпусных элементов (в том числе разводка жгутов, разъемы) - 870 см3.
Электропитание ИМ осуществляется:
1) от двух гальванически не связанных источников постоянного тока напряжением +15 В относительно средней точки;
2) постоянным током напряжением 12 В.
Кинематические схемы и принципы работы РВГ и капиллярного акселерометра АК-5 изложены в [3].
Описание программы сбора данных с ЧЭ ИБ БИИМ (stand.exe)
Программа stand.exe предназначена для записи данных с инерциальных датчиков и приемника GPS на жесткий диск. Результаты работы программы выводятся в виде графиков на панели управления программой, а также записываются в текстовый файл на жесткий диск.
Панель управления программы stand.exe (рис. 1.2) условно можно разделить на две части – панель настроек и панель отображения данных
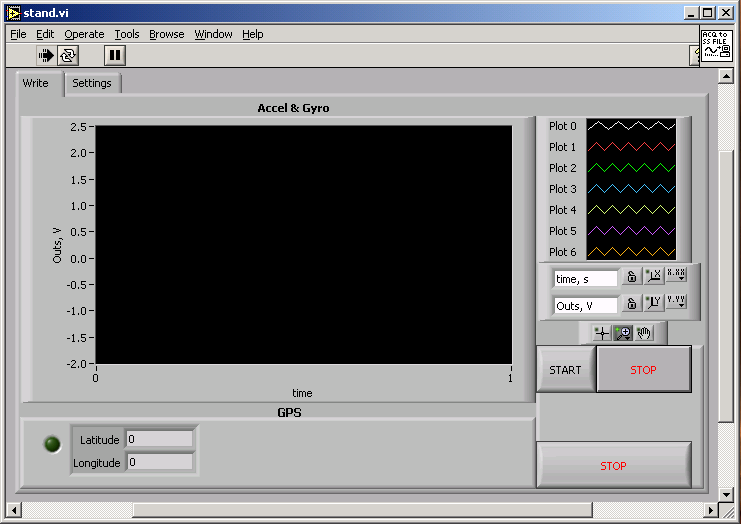
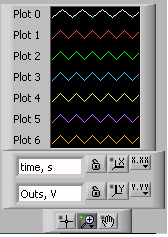
Рис. 1.2.Панель управления программы stand.exe Рис.1.3. Панель настроек графиков сигналов
Панель настроек (рис. 1.3) находится на панели управления программой справа. На ней отображается информация о том, какие каналы включены (Plot 0, Plot 1 и т.д.). Можно изменять настройки графиков: тип и толщину линии, цвет и вид графика.
Ниже находится панель управления параметрами осей. На ней располагаются два окна с названиями параметров, а также кнопки изменения настроек для каждой оси.
в
 ыравнивание
графика по соответствующей оси
ыравнивание
графика по соответствующей оси
м
 еню,
позволяющее изменять настройки
соответствующей оси (рис. 1.4): формат,
точность шкалы (количество знаков после
запятой), масштаб и цвет линий сетки по
оси.
еню,
позволяющее изменять настройки
соответствующей оси (рис. 1.4): формат,
точность шкалы (количество знаков после
запятой), масштаб и цвет линий сетки по
оси.
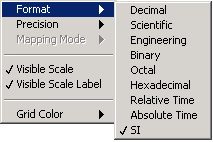

Рис. 1.4. Меню настроек оси Рис. 1.5. Меню настроек масштаба изображения
Ниже располагаются кнопки, общие для всех графиков:
в

 озможность
передвигать изображение с помощью
мышки
озможность
передвигать изображение с помощью
мышкименю, позволяющее изменять масштаб изображения (рис. 1.5)
При нажатии кнопки «START» появляется окно (рис. 1.6), в котором требуется указать путь и название файла, в который будут записываться данные (файл должен быть с расширением *.txt). Если данный файл уже существует, появится окно с предложением заменить уже существующий файл (рис. 1.7).

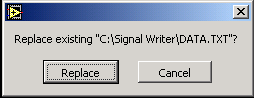
Рис. 1.6. Окно для указания пути или Рис. 1.7. Окно замены существующего файла
оздания файла с данными
П осле
указания названия или пути к файлу
начинается запись данных. Запись данных
заканчивается с нажатием кнопки «STOP».
осле
указания названия или пути к файлу
начинается запись данных. Запись данных
заканчивается с нажатием кнопки «STOP».
В левой части панели управления программой отображаются результаты измерений (рис. 1.8). Вверху расположен осциллограф, отображающий сигналы с акселерометров и гироскопов.
Ниже расположено поле, на котором выводятся значения широты (Latitude) и долготы (Longitude), снимаемые приемником GPS.
Большая кнопка «STOP» снизу – выход из программы (рис. 1.2).