

Цель работы
1.Исследование системы электропитания с регулируемым источником.
2.Оптимизация параметров системы электропитания с целью повышения качества регулирования и улучшения характеристик переходных процессов и стационарных режимов.
Описание системы
Принципиальная схема системы электропитания приведена на рис.1. Ее образуют:
- основной источник ЕО ;
- регулируемый источник ЕР ;
- датчик Д текущего значения регулируемой переменной;
- регулятор Р с уставкой Xуст номинального значения регулируемой переменной;
- исполнительный механизм ИМ , обеспечивающий изменение ЭДС ЕР.
Рис.1. Принципиальная схема системы питания
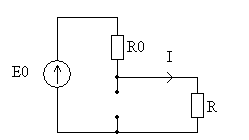
Эквивалентная схема замещения нагрузки приведена на рис.2. Регулируемой переменной является ток i , протекающий через резистор R.
Параметры нагрузки: RO=1.5 Ом, R=1.0 Ом, С=1000 мкФ.
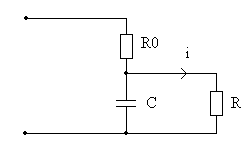
Рис.2.Схема замещения нагрузки
Для элементов цепи регулирования используются следующие эквиваленты:
датчик – пропорциональное звено с коэффициентом усиления КД;
регулятор – инерционное звено первого порядка с коэффициентом усиления КР и постоянной временя ТР;
исполнительный механизм – инерционное звено первого порядка с коэффициентом усиления Ким и постоянной времени Тим.
Параметры цепи регулирования: Ким=0.9 , Тим=0.002 с , Тр=0.001 с .
Номинальное значение регулируемой переменной в установившемся режиме: 100А.
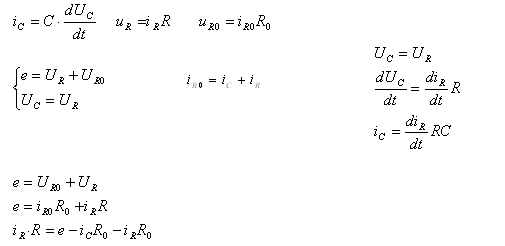
Расчет параметров звена, эквивалентирующего нагрузку.
Операторный метод

Физическое пространство
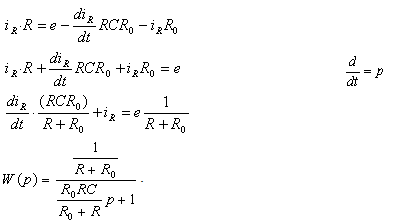
По передаточной функции видно, что это инерционное звено 1 порядка. Найдем численное значение его параметров.
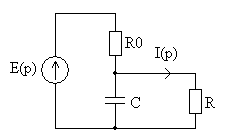
Расчет величины эдс Ео основного источника
методом расчета расчета установившегося режима системы питания и нагрузки
ЕР=0 I=100 А Rэ=Ro+R=2.5 Ом
Ео=I*Rэ=250 В
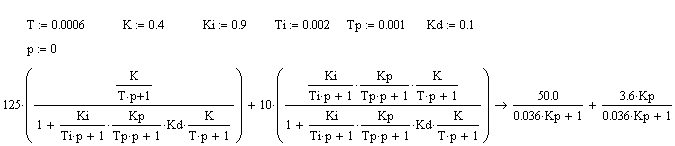
используя передаточную функцию звена нагрузки
![]()
![]()
![]()
Теоретическая и экспериментальная переходные характеристики звена нагрузки
Теоретическая переходная характеристика:
![]()
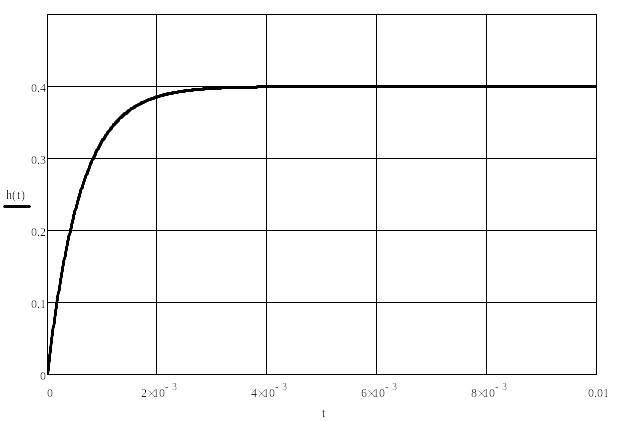
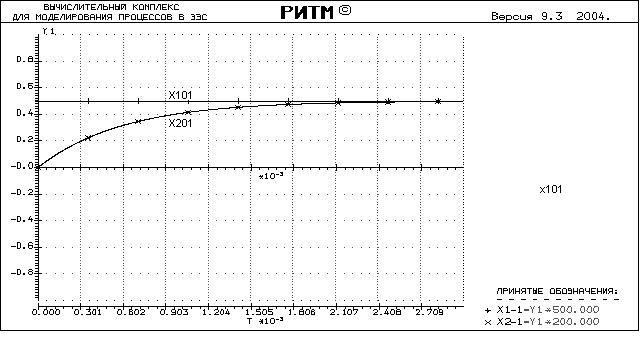
Экспериментальная переходная характеристика:
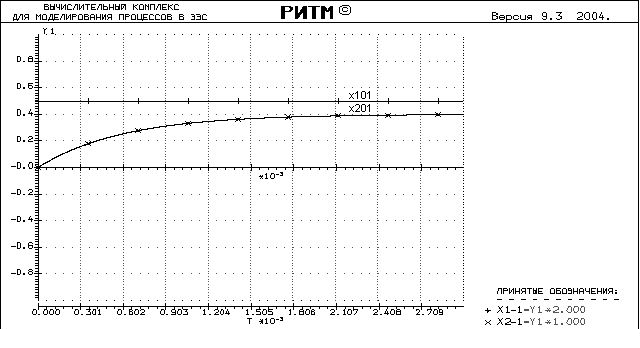
Определение параметров звена по экспериментальной переходной характеристике
K=h(![]() =0.4
=0.4
![]()
![]()
Тестовый расчет, подтверждающий правильность определения величины ЭДС Ео
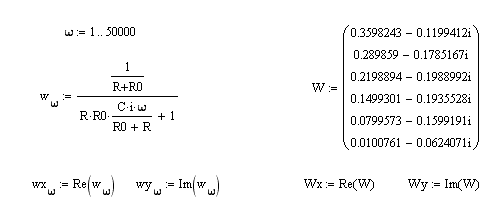
Построение аналитической амплитудно-фазовой частотной характеристики звена, эквивалентирующего нагрузку.
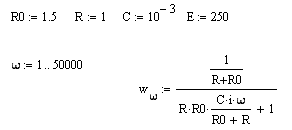
![]()
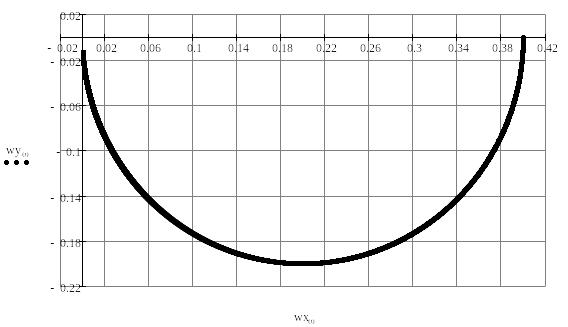
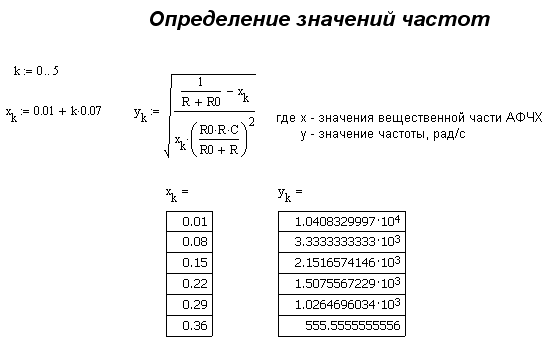
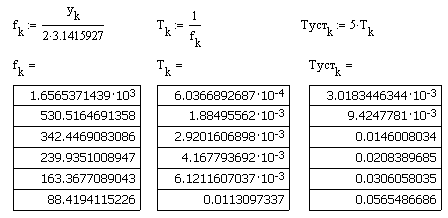
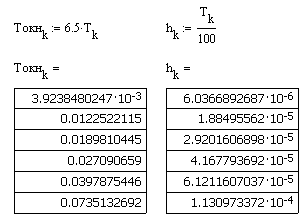
Таблица значений, необходимых для проведения серии расчетов, позволяющих построить экспериментальную амплитудно-фазовую частотную характеристику звена, эквивалентирующего нагрузку.
ω, рад/с |
f, Гц |
T, мс |
Tуст, мс |
Tокн, мс |
h,мкс |
555.5555556 |
88.4194115 |
11.3097337 |
56.5486686 |
73.5132692 |
113.0973372 |
1026.4696034 |
163.3677089 |
6.1211607 |
30.6058035 |
39.7875446 |
61.21160703 |
1507.5567229 |
239.9351009 |
4.1677937 |
20.8389685 |
27.090659 |
41.67793692 |
2151.6574146 |
342.4469083 |
2.9201607 |
14.6008034 |
18.9810445 |
29.20160689 |
3333.3333333 |
530.5164691 |
1.8849556 |
9.4247781 |
12.2522115 |
18.8495562 |
10408.329997 |
1656.5371439 |
0.6036689 |
3.0183446 |
3.92384802 |
6.036689268 |
где ω – частота гармонического сигнала (рад/с)
f – частота гармонического сигнала (Гц)
Т – период колебаний
Tуст – время окончания переходного процесса
Tокн – время окончания расчета
h – шаг расчета
Экспериментальная амплитудно-фазовая частотная характеристика
Схема имитационной модели:
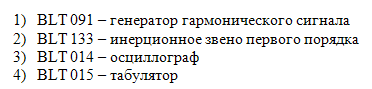
Осциллограмма выходного и входного сигнала при частоте f=1656.5371 Гц
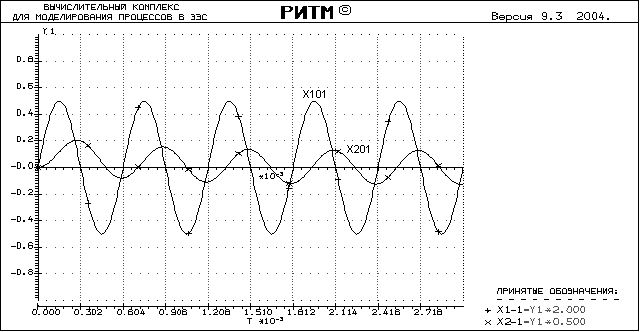
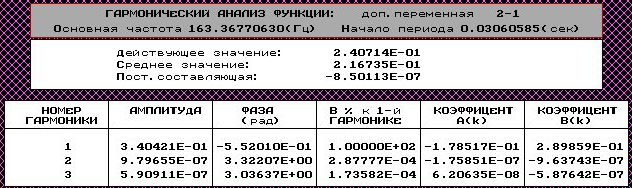
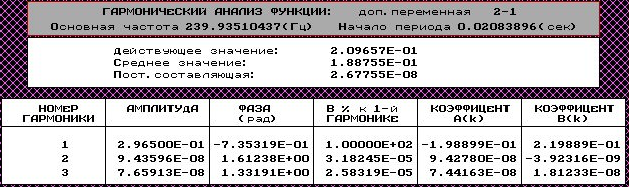
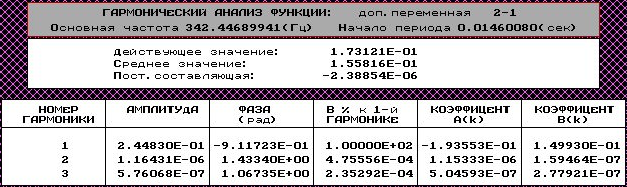
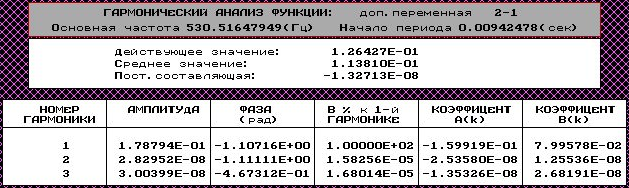
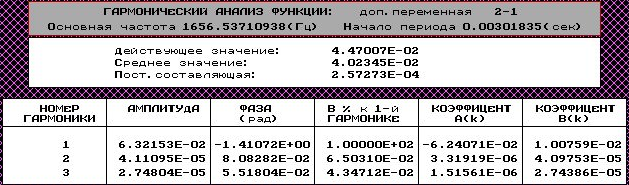
Значения полученные экспериментально:
Xmi |
|
w` |
w`` |
0.379288 |
-0.32175 |
0.3598243 |
-0.1199412 |
0.340421 |
-0.55201 |
0.289859 |
-0.1785167 |
0.2965 |
-0.735319 |
0.2198894 |
-0.1988992 |
0.24483 |
-0.911723 |
0.1499301 |
-0.1935528 |
0.178794 |
-1.10716 |
0.0799573 |
-0.1599191 |
0.0632153 |
-1.41072 |
0.0100761 |
-0.0624071 |
Пример расчета для первой строки
![]()
где Xmi – амплитуда выходного сигнала
![]() i
– фаза выходного сигнала
i
– фаза выходного сигнала
w` - вещественная часть АФЧХ
w`` - мнимая часть АФЧХ
Сравнение аналитической и экспериментально полученной АФЧХ.
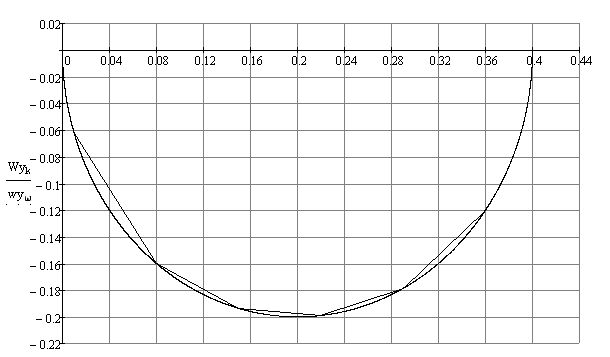
Аналитически и экспериментально полученные АФЧХ совпадают, что свидетельствует о правильности сделанных расчетов.
Структурная алгоритмическая схема системы автоматического управления
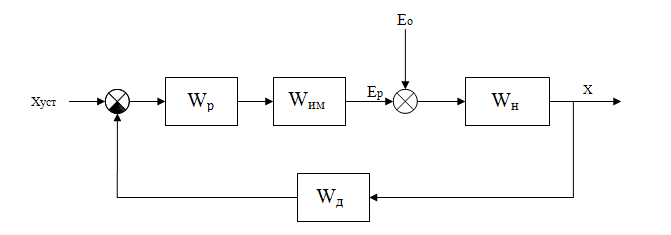
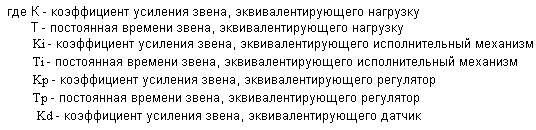
где WР – передаточная функция звена, эквивалентирующего регулятор
WИМ – передаточная функция звена, эквивалентирующего исполнительный механизм
WН – передаточная функция звена, эквивалентирующего нагрузку
WД – передаточная функция звена, эквивалентирующего датчик текущего значения регулируемой переменной
Область устойчивости системы
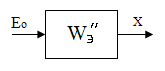
Найдем эквивалентную передаточную функцию САУ относительно ЕО и XУСТ
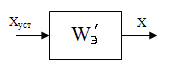
1) 2)
Преобразуем схему:
П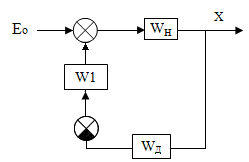 реобразуем
схему:
реобразуем
схему:
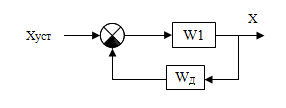
где W1=WPWИМ WН
![]()
![]()

![]()
![]()
Возьмем передаточную функцию относительно ЕО и подставим все передаточные функции, входящие в нее.
После упрощения получаем выражение:

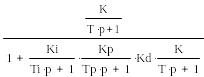
Характеристическое уравнение является знаменателем передаточной функции
![]()
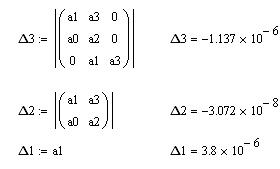
Зная характеристическое уравнение найдем область устойчивости
3 причины нарушения устойчивости:
аn=0
ao=0
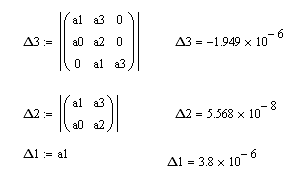
Δn-1=0
где ao – коэффициент при высшей степени полинома
аn - свободный член полинома
Δn-1 – предпоследний определитель Гурвица
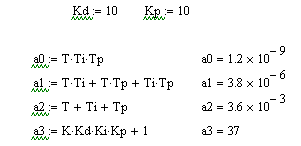
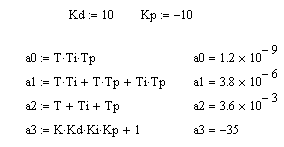
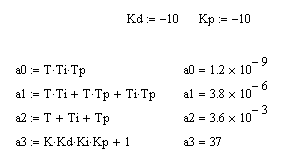
В нашем случае аn= K*Kd*Ki*Kp+1
ao= T*Ti*Tp
Подставим известные значения:

Полученные выражения приравниваем к нулю и таким образом получаем два уравнения связывающие коэффициенты Kр и Kd.
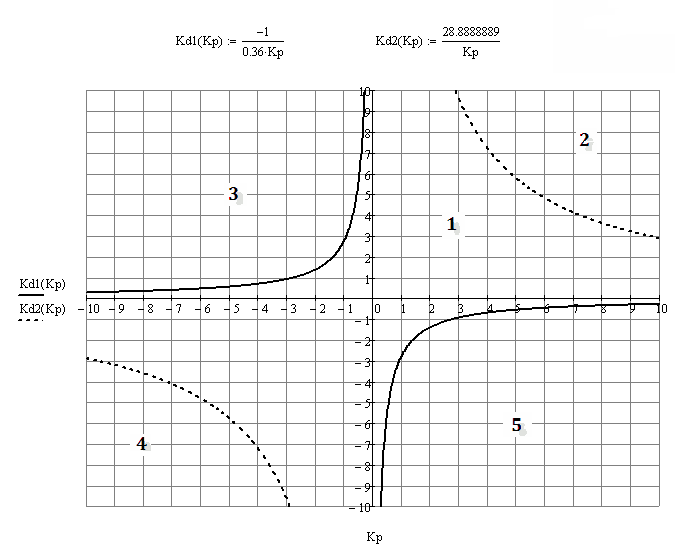
Таким образом получили 5 областей. Найдем в каких областях САУ устойчиво: для этого из каждой области возьмем по одной точке и воспользовавшись критерием устойчивости Гурвица проверим каждую область.
Критерий устойчивости Гурвица:
Необходимым и достаточным условием устойчивости является положительность определителя Гурвица и всех его диагональных миноров.
1область Кр=1 , Кд=1
Получаем следующие значения коэффициентов
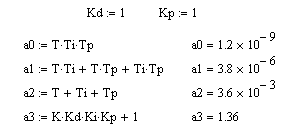
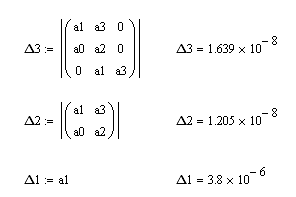
Все коэффициенты больше нуля, что говорит о том, что данная область устойчива.
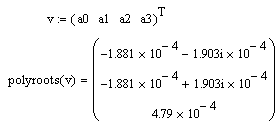
Для проверки найдем корни уравнения:
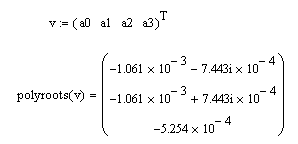
Вещественные части всех корней получились отритцательными, что подтверждает устойчивость.
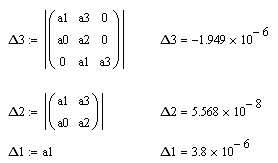
2область Кр=10 , Кд=10
Не все определители положительны, поэтому система в этой области неустойчива
К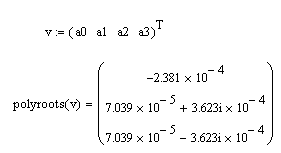 орни
уравнения:
орни
уравнения:
Есть корни с положительной вещественной частью, что говорит о том, что система в данной области неустойчива.
3 область
Кр=![]() 10
, Кд=10
10
, Кд=10
Не все определители положительны, поэтому система в этой области неустойчива
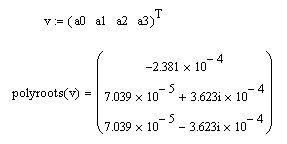
Корни уравнения:

Есть корень с положительной вещественной частью, что говорит о том, что система в данной области неустойчива.
4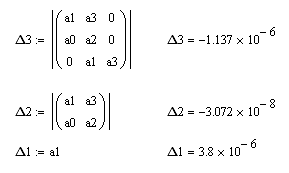 область Кр=
10
, Кд=
10
область Кр=
10
, Кд=
10
Не все определители положительны, поэтому система в этой области неустойчива
Корни уравнения:
Есть корни с положительной вещественной частью, что говорит о том, что система в данной области неустойчива.
5 область Кр=10 , Кд= 10
Не все определители положительны, поэтому система в этой области неустойчива
Корни уравнения:
Есть корень с положительной вещественной частью, что говорит о том, что система в данной области неустойчива.
Таким образом единственной устойчивой областью является первая.
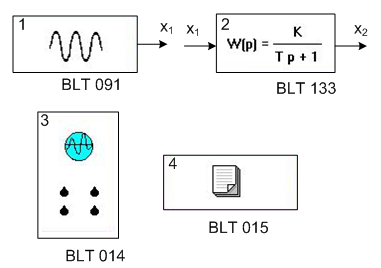
Имитационная модель системы автоматического управления
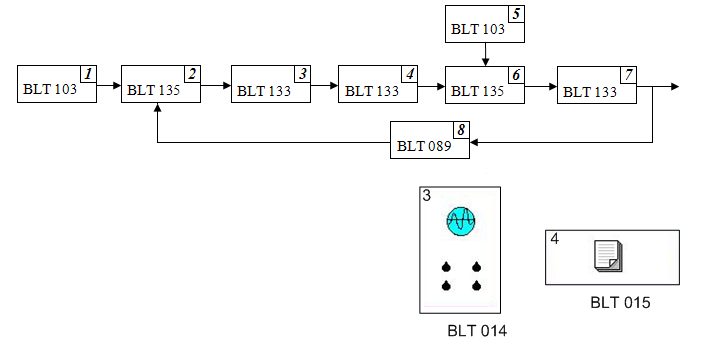
Используемые блоки:
BLT089 – пропорциональное звено;
BLT103 – источник кусочно-постоянного сигнала;
BLT133 – инерционное звено первого порядка;
BLT135 – сумматор;
BLT014 – осциллограф;
BLT015 – табулятор.
Из первой устойчивой области берем точку КД=0,1 , КР=1
Таким образом параметры блоков имеют следующие значения
3 К=1 Т=0,001
4 К=0,9 Т=0,002
7 К=0,4 Т=0,0006
8 К=0,1
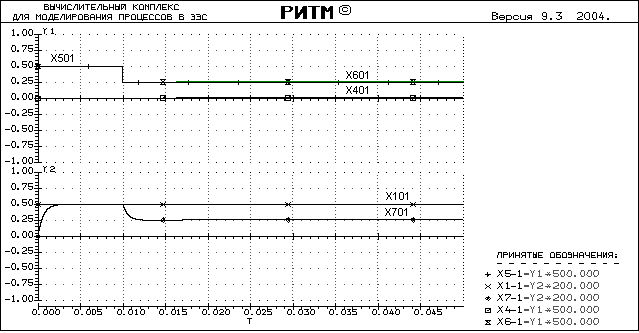
Полученная осциллограмма:
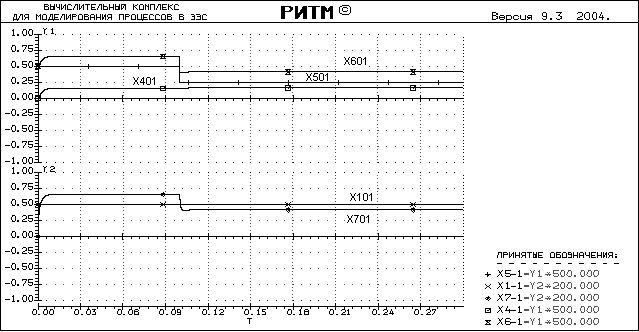
Видно, что при данных настройках системы требуемое условие ЕР=0 в установившемся режиме не выполняется. Внесем некоторые изменения в структуру системы. После 1 блока поставим пропорциональное звено с коэффициентом усиления равным коэффициенту усиления звена, эквивалентирующего датчик.
Таким образом получаем новую имитационную модель САУ.

.
Параметры блоков:
3 К=1 Т=0,001
4 К=0,9 Т=0,002
7 К=0,4 Т=0,0006
8 К=0,1
9 К=0,1
Полученная осциллограмма:
Из осциллограммы видно, что величина ЭДС ЕР регулируемого источника в статическом режиме уходит в ноль, но статизм системы очень плохой.
Подберем такой коэффициент КР( при фиксированном КД=0,1), при котором обеспечивается 5% статизм системы.
![]()
где ![]() – статизм
– статизм
![]() - изменение выходной величины
- изменение выходной величины
![]() - изменение внешнего воздействия
- изменение внешнего воздействия
В нашем случае ![]() ( после потери 50% ЭДС основного источника
Е=250 В)
( после потери 50% ЭДС основного источника
Е=250 В)
![]()
Тогда ![]()
Т.е. для обеспечения 5% статизма выходная величина ( переменная X701) должна в установившемся режиме выйти на значение 100-100*0,0625=93,75 ( при номинальном значение = 100)
Теоретическое определение коэффициента Кр , обеспечивающего 5% статизм.
![]()
x=w*f
где x – выходная величина
f – внешнее воздействие
w – передаточная функция
Поскольку у нас 2 передаточных функции воспользуемся методом наложения
Упрощаем выражение и приравниваем его к 93,75
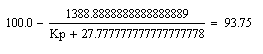
Отсюда находим что КР=194,444 .
Это значение попадает в область устойчивости
Имитационная модель
Параметры блоков:
3 К=194,444 Т=0,001
4 К=0,9 Т=0,002
7 К=0,4 Т=0,0006
8 К=0,1
9 К=0,1
Полученная осциллограмма:
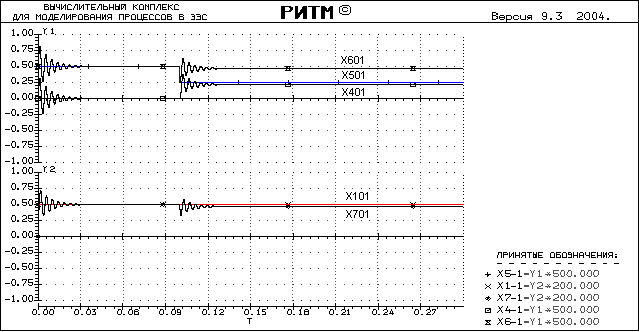
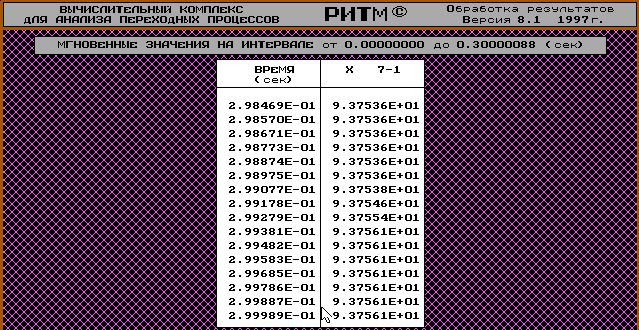
Видно что теоретически найденное значение КР обеспечивает нужный статизм с хорошей точностью.
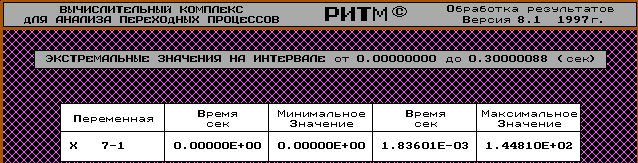
Но при данном значении параметра плохое перерегулирование σ=44,81 %
Подберем такое значение КР при котором перерегулирование будет 25 %.