

Пункт 14.
Для увеличения быстродействия системы
скомпенсируем самую медленную составляющую
системы. Самой медленной составляющей
системы является постоянная времени
исполнительного механизма
![]() .
Для ее компенсации воспользуемся
корректирующим идеальным
пропорционально-дифференцирующим
звеном с особо подобранной передаточной
функцией:
.
Для ее компенсации воспользуемся
корректирующим идеальным
пропорционально-дифференцирующим
звеном с особо подобранной передаточной
функцией:
Kп




Kп/p



![]()
Подбираем
![]() и
и
![]() так,
чтобы
так,
чтобы
![]() .
.
Так как мы уже использовали идеальное интегрирующее звено в астатическом управлении, то можем ввести параллельно ему пропорциональное звено, чтобы получить в качестве корректирующего звена пропорционально-интегрирующее звено.
Тогда структурно-алгоритмическая схема нашей САУ примет следующий вид:

W12
= Wп
=![]()
W11
= Wи
=![]()
Рассмотрим эквивалентную передаточную функцию данной САУ, эквивалентированную относительно :

Из знаменателя:
![]()
при замене р на получаем характеристический полином
![]() ,
,
с коэффициентами

Для определения области устойчивости воспользуемся критерием Гурвица.

Для построения границ областей устойчивости используем следующие уравнения:
1.
Т.е. = 0
![]() или
или
![]()
2.
Т.о. область устойчивости не изменилась при введении идеального пропорционального звена в схему САУ.
Подбираем и так, чтобы максимальная постоянная времени .
У нас
![]() ,
=2.3,
поэтому берем
,
=2.3,
поэтому берем
![]() .
.
Т.о. процесс включения системы питания с получением установившегося режима и последующий переходный процесс, обусловленный аварией с получением дальнейшего установившегося режима, при выборе вышеперечисленных настроек, имеет следующий вид:
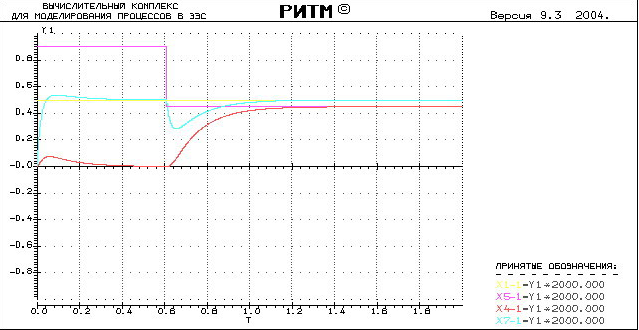
Из полученной осциллограммы видно, что длительность переходного процесса практически не изменилась, следовательно изменим настройки системы с целью получения лучшего быстродействия.
Найдем корни характеристического
полинома при
=2.3
и
![]() :
:
,
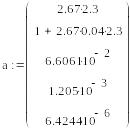

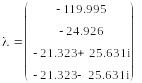
коэффициенты полинома
корни полинома
Длительность переходного процесса
![]()
Для того чтобы добиться достаточного
быстродействия САУ, будем изменять
значения
,
фиксируя
.
Наилучшее быстродействие получаем при
=
8 и
![]()

коэффициенты характеристического полинома данной САУ.
корни полинома
Длительность переходного процесса
![]()
Применяя данные настройки, получаем следующий график.
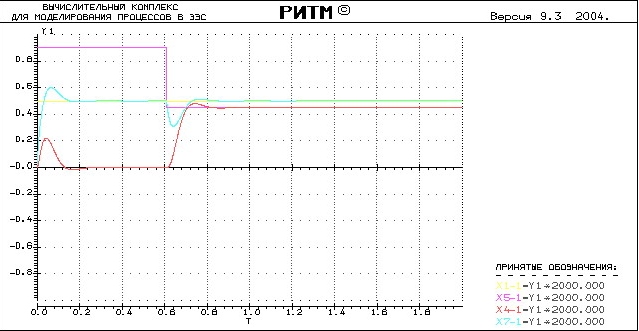
Из графика, полученного в ходе расчета, мы видим, что введение пропорционально-дифференцирующего звена позволило ускорить работу нашей системы.
Показатели качества
1.опытные
![]()

2.теоретические
![]()
![]()
=8.9%

Максимальное значение на нагрузке из данных табулятора равен 2243В, что не превышает 2Е0 = 3600В.
Вывод: в данной курсовой работе были исследованы системы электропитания и способы оптимизации параметров системы электропитания с целью повышения качества регулирования и улучшения характеристик переходных процессов в стационарных режимах. В ходе выполнения данного курсового проекта мы разработали систему автоматического регулирования, позволяющую при потере Э.Д.С. основного источника сохранять свою работоспособность. Для улучшения показателей качества системы использовали астатическое управление для улучшения перерегулирования, и далее, по заданию преподавателя, мы ускорили быстродействие нашей системы с помощью введения корректирующего звена. Из окончательного графика видно, что после проведения данных мероприятий максимальное напряжение на нагрузке не превышает двукратного значения Е0, а значит изоляция нашей системы выдержит напряжение на нагрузке, таким образом проведенные мероприятия привели к полной работоспособности нашей системы.