

Министерство образования Российской Федерации
Санкт-Петербургский Государственный Политехнический Университет
Электромеханический факультет
Кафедра ТВН, Электроснабжение
Курс “Теория автоматического регулирования”
Пояснительная записка
Вариант № 1
Выполнили: студенты группы 3021/3
Забурчик Н. А.,
Невзоров И. В.
Преподаватель: Попков Е. Н.
Санкт-Петербург
2007
Материалы к учебной работе по курсу
"Теория автоматического регулирования"
Вариант: 1
Цель работы
1. Исследование системы электропитания с регулируемым источником.
2. Оптимизация параметров системы электропитания с целью повышения качества регулирования и улучшения характеристик переходных процессов и стационарных режимов.
Описание системы
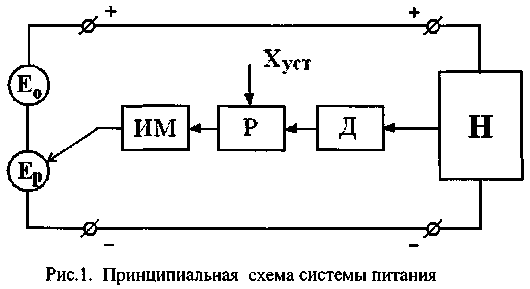
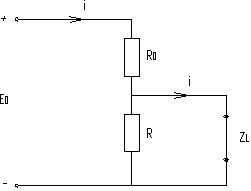
Принципиальная схема системы электропитания приведена на рис.1. Ее образуют:
- основной источник Е0;
- регулируемый источник Ер ;
- датчик Д текущего значения регулируемой переменной;
- регулятор Р с уставкой Хуст номинального значения регулируемой переменной;
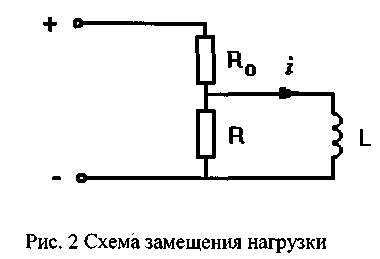
Эквивалентная схема замещения нагрузки приведена на рис.2. Регулируемой переменной является ток i катушки индуктивности L .
Для элементов цепи регулирования использовать следующие эквиваленты:
1) датчик - пропорциональное звено с коэффициентом усиления Кд;
2) регулятор - инерционное звено первого порядка с коэффициентом усиления Кр и постоянной времени Тр;
3) исполнительный механизм - инерционное звено первого порядка с коэффициентом усиления Ким и постоянной времени Тим.
Параметры цепи регулирования: Ким = 0.9 , Тим = 0.04 с. , Тр = 0.01 с .
Номинальное значение регулируемой переменной в установившемся режиме: 1 кА .
Выполнение курсовой работы.
Пункт 1.
Представить нагрузку системы питания в виде звена, для которого входным сигналом является напряжение на зажимах источника питания, а выходным сигналом - указанная регулируемая переменная. Получить описание звена в виде сокращенной записи дифференциального уравнения и передаточной функции. Установить тип звена и рассчитать численные значения параметров.
Физическое пространство:
Составим систему уравнений на основе первого и второго закона Кирхгофа и закона Ома:
![]()
Операторное пространство:

Имеем апериодическое звено 1-го порядка(инерционное звено 1-го порядка).

Пункт 2.
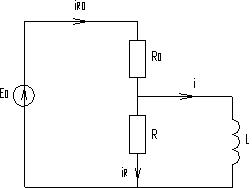
а) Определение величины э.д.с. Е0 основного источника методом расчета установившегося режима системы питания и нагрузки.
![]() ,
,
![]()

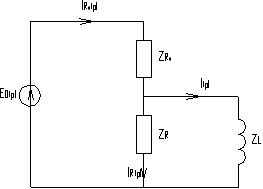
б) Определение величины э.д.с. Е0 основного источника, используя передаточную функцию звена.

Пункт 3.
Построение аналитической переходной характеристики звена, эквивалентирующего нагрузку.
![]()
![]()
![]()

Пункт 4.
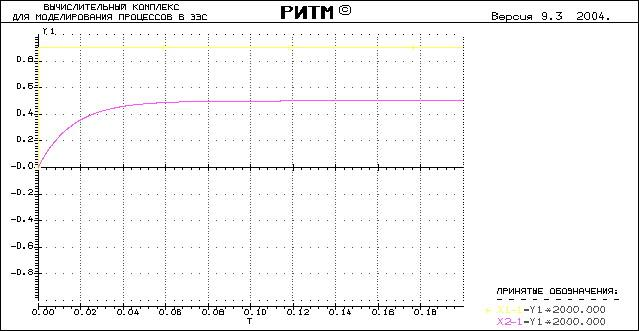
Получение на ЭВМ переходной характеристики звена, эквивалентирующего нагрузку. Используем вычислительный комплекс «РИТМ».
1) BLT 103 – источник кусочно-постоянного сигнала
2) BLT 133 – инерционное звено первого порядка
3) BLT 014 – осциллограф
4) BLT 015 – табулятор

Х1-входной сигнал звена (единичное ступенчатое воздействие)
Х2-сигнал на выходе звена - переходная характеристика звена (реакция звена на единичное ступенчатое воздействие).
Аналитическая переходная характеристика звена и построенная в РИТМе совпадают.
Определение параметров звена по экспериментальной переходной характеристике:
![]()
![]() (совпадает с аналитическим k=0.556)
(совпадает с аналитическим k=0.556)
![]() =0.310742,
=0.310742,
![]() =0.01312
=0.01312
 =
=![]() (отличие
от аналитического значения составляет
0.193%)
(отличие
от аналитического значения составляет
0.193%)
Пункт 5.
Выполнение тестового расчета, подтверждающего правильность определения э.д.с. Е0
Вместо источника единичного ступенчатого сигнала включаем в цепь источник с найденным аналитически значением ЭДС (Е0=1800В).
Х1- входной сигнал звена
Х2-сигнал на выходе звена
При выполнении тестового расчета было
получено значение выходного сигнала,
равное1000,80 А, что отличается от номинального
значения регулируемой величины (![]() )
на 0.08%.
)
на 0.08%.
Пункт 6.
Построение аналитической амплитудно-фазовой частотной характеристики звена, эквивалентирующего нагрузку.

![]()
![]()


Пункт 7.
Построение экспериментальной АФЧХ звена, эквивалентирующего нагрузку.
Схема имитационной модели:

1) BLT 091 – генератор гармонического сигнала
2) BLT 133 – инерционное звено первого порядка
3) BLT 014 – осциллограф
4) BLT 015 – табулятор
Таблица значений для расчетов, необходимых для построения АФЧХ звена, эквивалентирующего нагрузку:
ω, рад/с |
f,Гц |
|
Т,с |
Ток |
Тга |
h |
Xm |
φ,рад |
W' |
W'' |
350.374399 |
55.763817 |
0.016061 |
0.017933 |
0.107597 |
0.089664 |
0.000161 |
0.097282 |
-1.394925 |
0.017021 |
-0.095781 |
167.965088 |
26.732474 |
0.016061 |
0.037408 |
0.224446 |
0.187038 |
0.000161 |
0.19326 |
-1.215803 |
0.067174 |
-0.18121 |
105.296616 |
16.758477 |
0.016061 |
0.059671 |
0.358028 |
0.298356 |
0.000161 |
0.28299 |
-1.036783 |
0.14404 |
-0.24359 |
61.468104 |
9.782953 |
0.016061 |
0.102219 |
0.613312 |
0.511093 |
0.000161 |
0.395677 |
-0.778965 |
0.28158 |
-0.27798 |
36.362805 |
5.78732 |
0.016061 |
0.172792 |
1.036749 |
0.863958 |
0.000161 |
0.480125 |
-0.528578 |
0.4146 |
-0.24213 |
19.127184 |
3.044186 |
0.016061 |
0.328495 |
1.97097 |
1.642475 |
0.000161 |
0.531482 |
-0.298044 |
0.50805 |
-0.15607 |
7.372086 |
1.173304 |
0.016061 |
0.852294 |
5.113764 |
4.26147 |
0.000161 |
0.55214 |
-0.117852 |
0.54831 |
-0.06492 |
![]() ,
,![]() ,
,![]() ,
,
![]() ,
Tок=6Т, Тга=5Т, h=
,
Tок=6Т, Тга=5Т, h=![]()
Tок – время окончания расчета,
Тга – время гармонического анализа
h – шаг расчета.
![]() находим с помощью трассировки аналитической
АФЧХ(значения А и В).
находим с помощью трассировки аналитической
АФЧХ(значения А и В).

Результаты, полученные в программе РИТМ:
В РИТМе были получены значения для действительной Wr1 и мнимой Wr2 частей АФЧХ. По этим значениям были выставлены 7 точек, которые лежат на аналитической АФЧХ.
Красный цвет – аналитически построенная АФЧХ.
Синий цвет – экспериментально построенная АФЧХ.
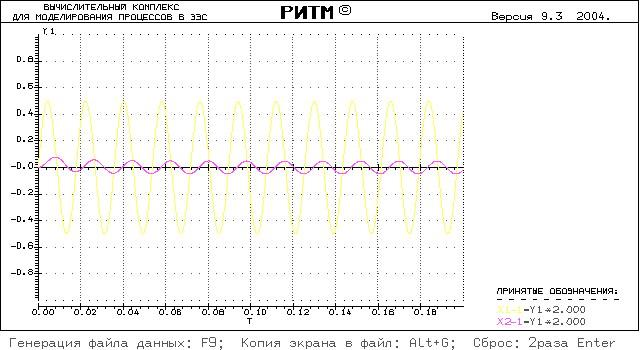
Гармонический анализ.
![]()
Пункт 8.
Cтруктурная алгоритмическая схема САУ.


Далее преобразуем схему.
1.Объеденяем последовательно соединенные звенья W3 ,W4

2.Переносим вперед через сумматор 6 звено с передаточной функцией W3*W4

3.Объединяем сумматоры 2 и 6. Далее эквивалентируем передаточные функции звеньев W3,W4,W7,W8, объединенных в обратную отрицательную связь, получаем звено W9

4.Эквивалентируем относительно Xуст

Получим эквивалентную передаточную функцию.
![]()

5.Эквивалентируем относительно Eo

Получим эквивалентную передаточную функцию.
Пункт 9.
Построим область устойчивости системы
в плоскости коэффициентов
![]()
Из знаменателя эквивалентной передаточной функции:
![]()
При замене р на
![]() получаем характеристический полином:
получаем характеристический полином:
![]() ,
,
с коэффициентами

Для определения области устойчивости используем критерий устойчивости Гурвица.
Условие устойчивости заключается в требовании положительности определителя Гурвица и всех его диагональных миноров.
Т.о. условия устойчивости:
![]()
 -определитель
Гурвица
-определитель
Гурвица

Для построения границ областей устойчивости используем следующие уравнения
1.![]()
Т.е.
![]() = 0
= 0
![]()
2.
![]()

Таким образом, используя следующие уравнения,
![]()
![]()
строим область устойчивости.
![]()
![]()
![]()
![]()
5
4
3
1
2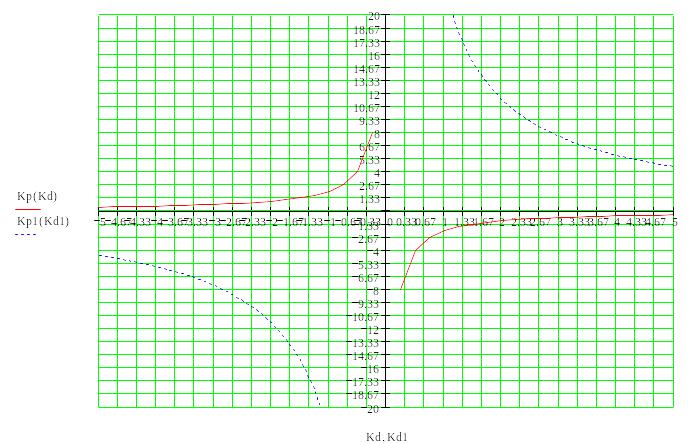
Получаем 5 областей, которые могут быть областями устойчивости. Проверим эти области на устойчивость.
Рассмотрим область 1.
Возьмем
![]()

Область 1 не является устойчивой, т.к.
не выполняется условие
![]() .
.
Рассмотрим область 2.
Возьмем
![]()

Область 2 также не является устойчивой.
Рассмотрим область 3.
Возьмем
![]()

Область 3 является устойчивой, т.к. выполняются условия устойчивости, а именно положительность определителя Гурвица и всех его диагональных миноров.
Области 4,5 аналогично областям 1 и 2 не являются устойчивыми.
Преподавателем были выбраны коэффициенты
![]() из области устойчивости.
из области устойчивости.
Пункт 10.
Далее, после выбора коэффициентов из области устойчивости, подготовим имитационная модель САУ в программе РИТМ, имеющую следующий вид.

1-генератор кусочно-постоянного
сигнала
![]()
2-сумматор
коэффициенты сумматора
k = 1, k = -1
3-инерционное звено первого порядка
![]()
4- инерционное звено первого порядка
![]()
5- генератор кусочно-постоянного
сигнала
![]() =
1800 В.
=
1800 В.
6- сумматор
коэффициенты сумматора
k = 1,k = 1
7- инерционное звено первого порядка
![]()
8-пропорциональное звено
![]()
9-осцилограф
10-табулятор
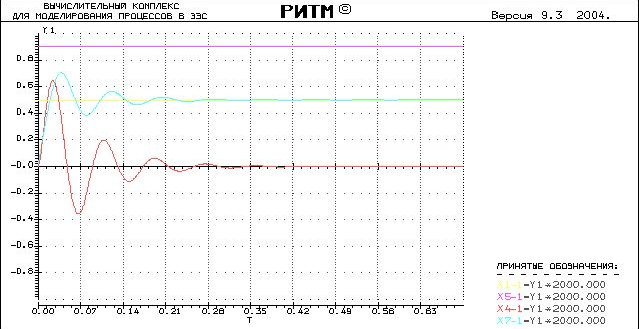
В результате расчета данной имитационной модели был получен график:

Видно,
что при данных настройках системы
требуемое условие
![]() = 0
в установившемся режиме не выполняется.
Внесем некоторые изменения в настройки
системы.
= 0
в установившемся режиме не выполняется.
Внесем некоторые изменения в настройки
системы.
Пункт 11.
Обеспечим нулевую величину э.д.с. регулируемого источника.
Для этого изменим значение коэффициента сумматора у Xуст на k=2.


Т.о. через регулируемый источник пройдет нулевой сигнал, и, следовательно, получаем = 0.
Переходный процесс включения системы питания при нулевых начальных условиях будет иметь следующий вид.
Рассчитаем статизм, перерегулирование и длительность переходного процесса по результатам опыта и теоретически.