

30. Принцип действия тензометрического датчика, оптического инкрементного датчика.
Оптический инкрементный датчик.

Тензодатчик – это датчик силы, крутящего моменты и сжатия.

31. Автоматическая система регулирования (аср), контур управления, математическое описание контура управления.
“АСР” бывают двух типов: замкнутые и разомкнутые.
Разомкнутая система “acp”

ЗУ – задающее устройство (задает сигнал управления)
УУ – управляющее устройство (измеряет и преобразует управляемый сигнал)
ИУ – исполнительное устройство
УО – управляемый объект
Замкнутая система “АСР”

Д – датчик
СУ – сравнивающее устройство
ОР – объект регулирования
Принципы регулирования
Регулирование по отклонению
1 – якорь
2 – рычаг
3 – обмотка электромагнита
4 – пружина
Если напряжение генератора возросло, возрастает сила “F” и увеличивается “RB”, ток “IB” падает и “UГ” тоже падает.
UГ↑ → F↑ → RB↑ → IB↓ → UГ↓
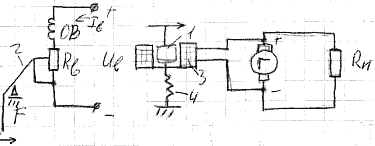
Регулирование по возмущению
В этих “ACP” выходной параметр не измеряется, а ведется “борьба” с нежелательными внешними воздействиями.

В данной схеме предполагается, что основным возмущающим воздействием является изменение частоты вращения ротора генератора, поэтому в цепь возбуждения включен реостат “R”, сопротивление которого изменяет центробежный регулятор “1”.
Если обороты генератора увеличатся, то под действием центробежной силы грузы регулятора будут перемещаться в направлении, показанном стрелками, движок реостата передвинется влево, ток возбуждения уменьшается, напряжение генератора уменьшается.
Комбинированное регулирование
При комбинированном регулировании используют регуляторы по отклонению и возмущению одновременно, это повышает точность регулировок и быстродействие.
Классификация автоматических регуляторов
В зависимости от значения регулируемого параметра различают регуляторы:
1.Стабилизирующие – они поддерживают постоянным регулируемый параметр.
2.Програмые – обеспечивают изменение регулируемого параметра по программе.
3.Следящие – обеспечивают закономерное изменение регулируемого параметра в зависимости от изменения внешних условий.
Системы управления разделяют на два больших класса:
Автоматизированные системы управления (АСУ) — с участием человека в контуре управления;
Системы автоматического управления (САУ) — без участия человека в контуре управления.
Есть 3 вида контура управления:
Контур регулирования (входит или не входит ЛПР)
Контур адаптации
Контур обучения
32. Основные свойства объекта регулирования
Автоматическая система с замкнутой цепью воздействия, в которой управляющее (регулирующее) воздействие вырабатывается в результате сравнения истинного значения управляемой (регулируемой) величины с заданным (предписанным) ее значением, называется АСР.
Поскольку объект регулирования является элементом или звеном АСР, то свойства АСР зависят прежде всего от свойств объекта регулирования. Поэтому для создания работоспособной АСР обеспечивающей требуемое качество регулирования, необходимо прежде всего, знать свойства объекта регулирования (стастические и динамические).
Статические характеристики определяют расчетным или экспериментальным путем.
Динамической характеристикой объекта регулирования называется зависимость выходной величины от входной величины в переходном режиме.