

6.2. Графики движения ро механизма по расчетной траектории (дуги окружности)
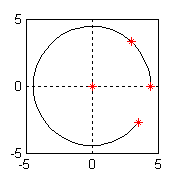
Рисунок 6.2- Траектория движения РО механизма в плоскости в ОСК промышленного механизма ПМ ( =0).
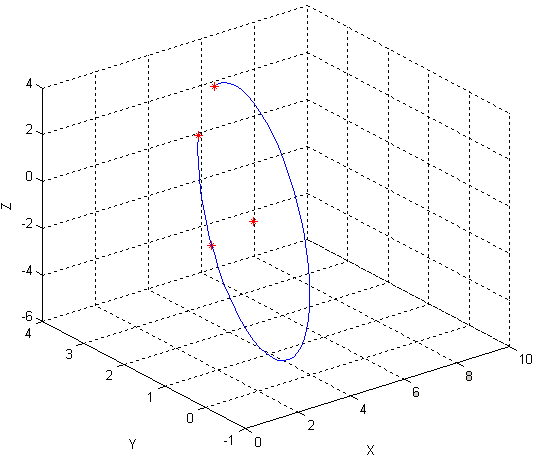
Рисунок 6.3 – Траектория движения РО механизма в пространстве зоны обслуживания ПМ в АСК OXYZ .
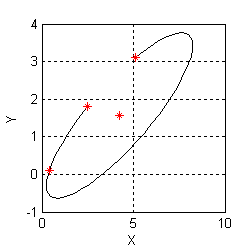
Рисунок 6.4- Проекция траектории движения РО механизма в пространстве зоны обслуживания ПМ на плоскость XOY ACK OXYZ .
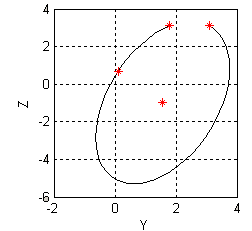
Рисунок 6.5- Проекция траектории движения РО механизма в пространстве зоны обслуживания ПМ на плоскость YOX ACK OXYZ .
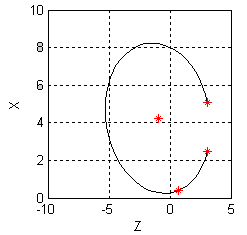
Рисунок 6.6- Проекция траектории движения РО механизма в пространстве зоны обслуживания ПМ на плоскость ZOX ACK OXYZ .
Случай 7
Исходные данные :
ПЗ : «П2»; ВД=2; N= =15
Интерфейс ввода исходных данных представлен на рисунке 7.1
`
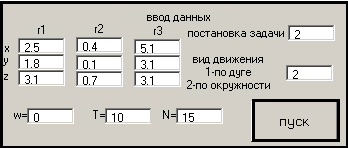
Рисунок 7.1 – Интерфейс ввода исходных данных для случая 7
7.2 Результат расчета траектории движения РО механизма
1 Координаты исходных точек к дуге окружности см :
(2,5 ;1,8; 3,1)
(0,4 ; 0,1; 0,7)
(5,1; 3,1 ;3,1)
2. Координаты центра дуги окружности в АСК OXYZ см
r0 =
4.2419
1.5661
-0.9794
3. Матрица преобразования прямоугольных координат из ОСК в АСК OXYZ см
4. Координаты радиус векторов исходных точек в ОСК ; ; :
ro1 =
4.4419
-0.0000
0
1.0000
ro2 =
2.9718
3.3013
0.0000
1.0000
ro3 =
3.4907
-2.7469
-0.0000
1.0000
5. Радиус дуги окружности R см :
ro0 = 0
0
0.0000
1.0000
6. Координаты центральных углов и сами центральные углы образованные радиус векторами углы должны быть выражены в радианах и угловых градусах
cno12 =
0.6690
cno13 =
0.7859
n12 =
0.8379
n12g =
47.9879
n13 =
5.6190
n13g =
321.8159
7. Угловая скорость движения рабочего
органа по дуге окружности
![]()
8. Количество точек дискретизации N=15
9. Время прохождения РО в дуге окружности ТО= 10
10. Линейная скорость движения РО по дуге окружности V = speed = 2.7920 cм/c
11. Рассчетные дискретные шаги движения РО по дуге окружности с
![]() рад
рад
12. Таблица рассчета текущих координат движения РО механизма по дуге окружности (абсолютных и относительных )
, с |
|
|
|
|
|
|
|
0 0 2.5000 1.8000 3.1000 4.4419 0 0 0.6667 24.0000 1.1854 0.8915 2.1723 4.0576 1.8074 0 1.3333 48.0000 0.3998 0.0997 0.6992 2.9711 3.3020 0 2.0000 72.0000 0.2790 -0.4384 -1.0644 1.3705 4.2252 0 2.6667 96.0000 0.8440 -0.6295 -2.8133 -0.4673 4.4172 0 3.3333 120.0000 1.9970 -0.4407 -4.2448 -2.2242 3.8449 0 4.0000 144.0000 3.5384 0.0953 -5.1112 -3.5962 2.6072 0 4.6667 168.0000 5.2017 0.8859 -5.2627 -4.3459 0.9184 0 5.3333 192.0000 6.6988 1.7942 -4.6729 -4.3436 -0.9294 0 6.0000 216.0000 7.7708 2.6631 -3.4440 -3.5896 -2.6163 0 6.6667 240.0000 8.2321 3.3421 -1.7886 -2.2145 -3.8505 0 7.3333 264.0000 8.0030 3.7138 0.0069 -0.4561 -4.4184 0 8.0000 288.0000 7.1230 3.7138 1.6316 1.3812 -4.2217 0 8.6667 312.0000 5.7444 3.3422 2.8046 2.9794 -3.2944 0 9.3333 336.0000 4.1059 2.6633 3.3227 4.0621 -1.7971 0 10.0000 360.0000 2.4909 1.7945 3.0964 4.4419 0.0112 0 |
|||||||