

2.2. Графики движения ро механизма по расчетной траектории (дуги окружности)
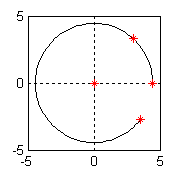
Рисунок 2.2- Траектория движения РО механизма в плоскости в ОСК промышленного механизма ПМ ( =0).
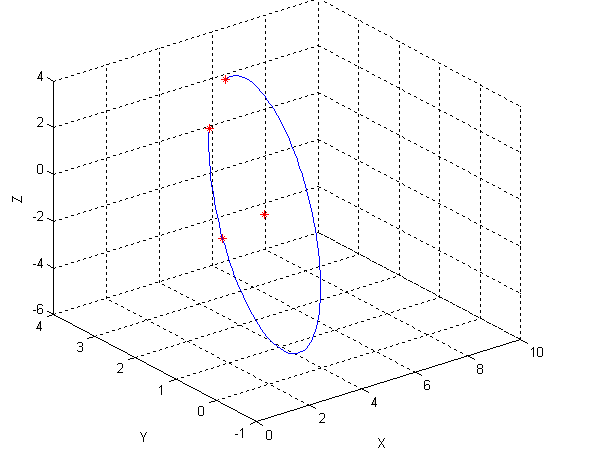
Рисунок 2.3 – Траектория движения РО механизма в пространстве зоны обслуживания ПМ в АСК OXYZ .
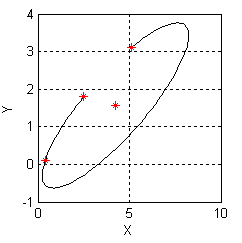
Рисунок 2.4- Проекция траектории движения РО механизма в пространстве зоны обслуживания ПМ на плоскость XOY ACK OXYZ .
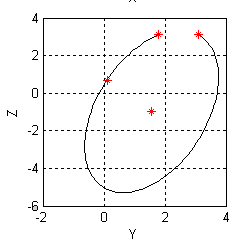
Рисунок2.5- Проекция траектории движения РО механизма в пространстве зоны обслуживания ПМ на плоскость YOX ACK OXYZ .
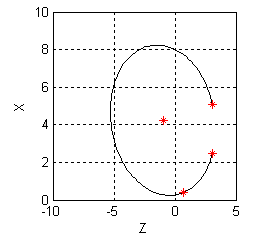
Рисунок 2.6- Проекция траектории движения РО механизма в пространстве зоны обслуживания ПМ на плоскость ZOX ACK OXYZ .
Случай 3
Исходные данные :
ПЗ : «П1»; ВД=2; N= =8
Интерфейс ввода исходных данных представлен на рисунке 3.1
`
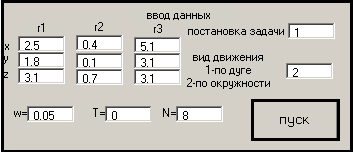
Рисунок 3.1 – Интерфейс ввода исходных данных для случая 3
3.2 Результат расчета траектории движения РО механизма
1 Координаты исходных точек к дуге окружности см :
(2,5 ;1,8; 3,1)
(0,4 ; 0,1; 0,7)
(5,1; 3,1 ;3,1)
2. Координаты центра дуги окружности в АСК OXYZ см
r0 =
4.2419
1.5661
-0.9794
3. Матрица преобразования прямоугольных координат из ОСК в АСК OXYZ см
4. Координаты радиус векторов исходных точек в ОСК ; ; :
ro1 =
4.4419
-0.0000
0
1.0000
ro2 =
2.9718
3.3013
0.0000
1.0000
ro3 =
3.4907
-2.7469
-0.0000
1.0000
5. Радиус дуги окружности R см :
ro0 = 0
0
0.0000
1.0000
6. Координаты центральных углов и сами центральные углы образованные радиус векторами углы должны быть выражены в радианах и угловых градусах
cno12 =
0.6690
cno13 =
0.7859
n12 =
0.8379
n12g =
47.9879
n13 =
5.6190
n13g =
321.8159
7. Угловая скорость движения рабочего органа по дуге окружности
8. Количество точек дискретизации N=8
9. Время прохождения РО в дуге окружности ТО= 125.7143
10. Линейная скорость движения РО по дуге окружности V = speed = 0.2221cм/c
11. Рассчетные дискретные
шаги движения РО по дуге окружности
![]() с
с
![]() рад
рад
12. Таблица рассчета текущих координат движения РО механизма по дуге окружности (абсолютных и относительных )
, с |
|
|
|
|
|
|
|
0 0 2.5000 1.8000 3.1000 4.4419 0 0 15.7143 45.0000 0.4634 0.1872 0.9051 3.1399 3.1419 0 31.4286 90.0000 0.6418 -0.6172 -2.3945 -0.0028 4.4419 0 47.1429 135.0000 2.9308 -0.1417 -4.8646 -3.1439 3.1379 0 62.8571 180.0000 5.9884 1.3350 -5.0570 -4.4419 -0.0056 0 78.5714 225.0000 8.0222 2.9472 -2.8589 -3.1359 -3.1458 0 94.2857 270.0000 7.8398 3.7498 0.4410 0.0084 -4.4419 0 110.0000 315.0000 5.5483 3.2722 2.9082 3.1478 -3.1339 0 125.7143 360.0000 2.4909 1.7945 3.0964 4.4419 0.0112 0 |
|||||||
3.2. Графики движения РО механизма по расчетной траектории (дуги окружности)
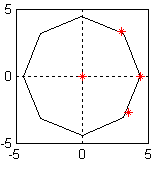
Рисунок3.2- Траектория движения РО механизма в плоскости в ОСК промышленного механизма ПМ ( =0).
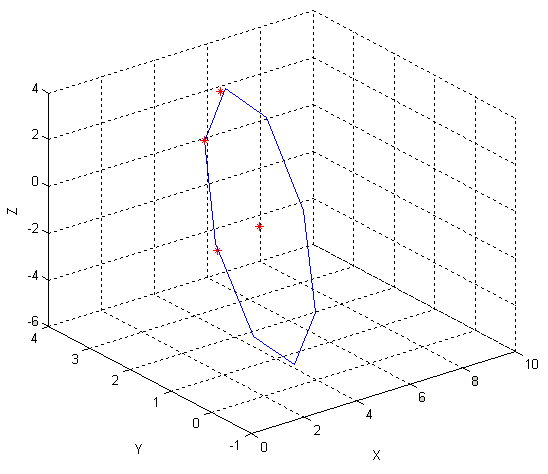
Рисунок 3.3 – Траектория движения РО механизма в пространстве зоны обслуживания ПМ в АСК OXYZ .
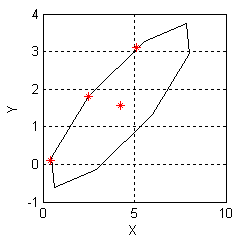
Рисунок 3.4- Проекция траектории движения РО механизма в пространстве зоны обслуживания ПМ на плоскость XOY ACK OXYZ .
Рисунок 3.5- Проекция траектории движения РО механизма в пространстве зоны обслуживания ПМ на плоскость YOX ACK OXYZ .

Рисунок 3.6- Проекция траектории движения РО механизма в пространстве зоны обслуживания ПМ на плоскость ZOX ACK OXYZ .