Лекция № 13 нелинейное программирование
Рассматриваемые вопросы
1. Постановка задачи нелинейного программирования.
2. Составление математической модели.
3. Графический метод решения задачи линейного программирования.
13.1. Постановка задачи нелинейного программирования
В общем виде задача нелинейного программирования (ЗНП) формулируется следующим образом:
![]() (13.1)
(13.1)
 (13.2)
(13.2)
где
хj
– управляющие переменные или решения
ЗНП,
![]() ;
;
bi
– фиксированные параметры,
![]() ;
;
f,gi,![]() – заданные функции от п
переменных.
– заданные функции от п
переменных.
Если f и gi линейны, то уравнения (13.1) и (13.2) переходят в задачу линейного программирования.
Решить
задачу нелинейного программирования
– это значит найти такие значения
управляющих переменных xj,
которые удовлетворяют системе ограничений
(13.2) и доставляют максимум или минимум
функции
![]() .
.
Для задачи нелинейного программирования, в отличие от линейных задач, нет единого метода решения. В зависимости от вида целевой функции (13.1) и ограничений (13.2) разработано несколько специальных методов решения, к которым относятся методы множителей Лагранжа, квадратичное и выпуклое программирование, градиентные методы, ряд приближенных методов решения, графический метод.
Заметим, что нелинейное моделирование технических и экономических задач часто бывает искусственным. Большая часть проблем сводится к линейным моделям, поэтому в данном пособии нелинейные модели и методы расчета рассмотрены достаточно кратко.
13.2. Геометрическая интерпретация задачи нелинейного программирования. Графический метод решения
Рассмотрим задачу нелинейного программирования, содержащую две переменные.
![]() (13.3)
(13.3)
 (13.4)
(13.4)
Система ограничений (3.4) определяет в n-мерном пространстве некоторую область, которая является областью допустимых решений задачи.
Решить
ЗНП графически – это значит найти точку
в области допустимых решений (13.4), через
которую проходит линия
![]() наивысшего (наинизшего) уровня.
наивысшего (наинизшего) уровня.
Указанная точка может находиться как на границе, так и внутри области допустимых решений (13.4), в отличие от задач линейного программирования.
Так же, как и для линейных задач, ЗНП удобно решать графически, когда функция и ограничения содержат две переменные.
13.3. Алгоритм решения знп графическим методом
Шаг 1. На плоскости x10x2 строят область допустимых решений, определенную ограничениями (13.4). Если она пуста, т. е. ограничения несовместны, то задача (13.3)–(13.4) не имеет решения. В противном случае переходят к шагу 2.
Шаг 2. Строят линию уровня функции , где С – некоторая константа. Переход к шагу 3.
Шаг 3. Определяют направление возрастания (при максимизации), убывания (при минимизации) функции .
Шаг 4. Находят точку области допустимых решений, через которую проходит линия уровня с наибольшим (при максимизации), наименьшим (при минимизации) значением С или устанавливают неограниченность функции на области допустимых решений.
Шаг 5. Определяют значения x1, x2 для точки, найденной на шаге 4, и величину функции в этой точке.
Пример решения знп графическим методом
![]()
В соответствии с алгоритмом построим на плоскости x10x2 область допустимых решений (рис. 13.1).
Ограничения
![]() ,
,
![]() выделяют на плоскости x10x2
первую четверть. Границей полуплоскости,
соответствующей первому ограничению,
является гипербола:
выделяют на плоскости x10x2
первую четверть. Границей полуплоскости,
соответствующей первому ограничению,
является гипербола:
 .
.
Неравенство выполняется для точек, лежащих выше гиперболы. Границей полуплоскости, определяемой вторым ограничением, является окружность с центром в точке (0,0) и радиусом, равным 4. Искомая полуплоскость заштрихована вертикальной штриховкой. Область допустимых решений выделена горизонтальной штриховкой.
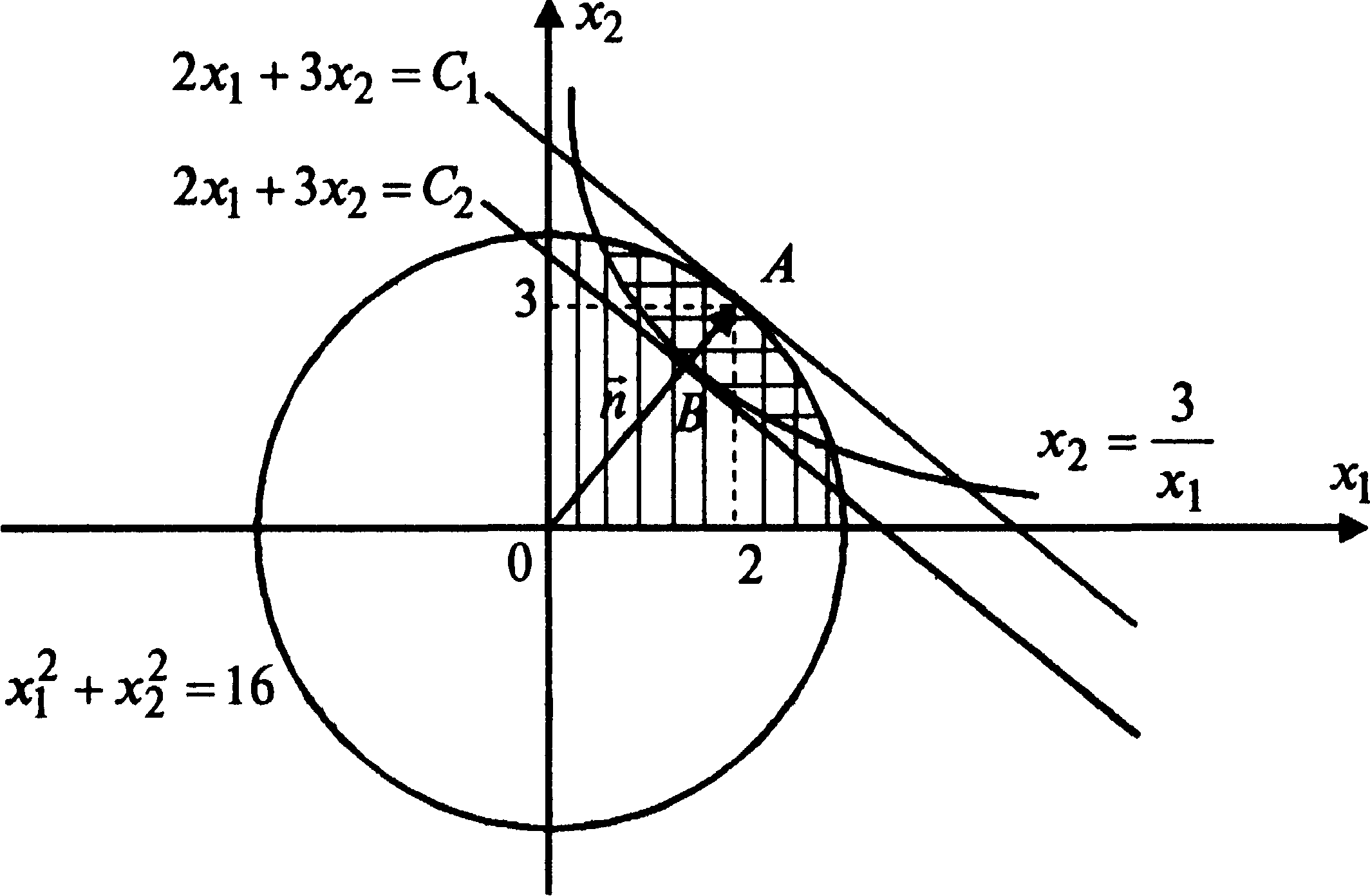
Рис. 13.1. Область допустимых решений
Функция
возрастает в направлении вектора-нормали
![]() с координатами (2,3), и ее линии уровня
расположены перпендикулярно вектору-нормали
.
Таким
образом, максимум достигается в точке
A,
а минимум – в точке B.
с координатами (2,3), и ее линии уровня
расположены перпендикулярно вектору-нормали
.
Таким
образом, максимум достигается в точке
A,
а минимум – в точке B.
Заметим,
что в точке A
совпадают тангенсы углов наклона
касательной к окружности
![]() и прямой
и прямой
![]() к оси 0x1.
Тангенсы углов наклона касательной и
прямой к оси 0x1
определяются значениями производных
по x1
соответствующих функций. Для прямой
к оси 0x1.
Тангенсы углов наклона касательной и
прямой к оси 0x1
определяются значениями производных
по x1
соответствующих функций. Для прямой
![]() тангенс равен
тангенс равен
![]() .
.
Продифференцируем выражение как неявную функцию от x1. Получаем:
![]()
Приравниваем значения тангенсов, получаем:
 ;
;
![]() .
.
К этому уравнению добавим уравнение окружности, которой принадлежит точка A. Получаем систему:
Решив ее, найдем оптимальное решение
Аналогично
определим координату точки B,
в которой тангенс угла наклона к оси
0х1
прямой
![]() совпадает с тангенсом угла наклона
касательной к функции
совпадает с тангенсом угла наклона
касательной к функции
![]() .
.
Получаем уравнение
Вторым для нахождения координат точки является уравнение гиперболы, которой принадлежит точка B:
Из
последней системы найдем оптимальное
решение, соответствующее минимальному
значению
![]() :
: