

7. Основные методы радиолокации, их принципиальные отличия.
П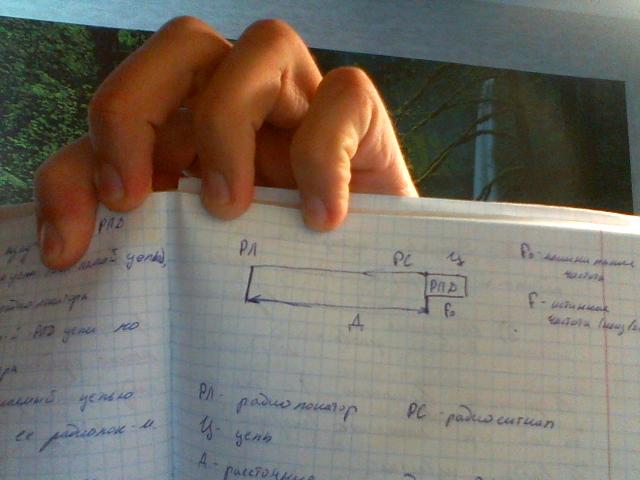 о
своей физической природе радиолокационный
сигнал может быть 3-х видов: радиосигнал,
излучаемый РПД, устройством на цели не
зависимо от РЛ, радиосигнал, излучаемый
РПД цели по запросу РЛ(ответный),
радиосигнал, отражаемый целью при
облучении её РЛ(отраженный). В зависимости
от типа используемого радиосигнала
различают пассивные метод РЛ, метод
активного ответа (по ответному сигналу),
метод активного ответа(по отраженному
сигналу).
о
своей физической природе радиолокационный
сигнал может быть 3-х видов: радиосигнал,
излучаемый РПД, устройством на цели не
зависимо от РЛ, радиосигнал, излучаемый
РПД цели по запросу РЛ(ответный),
радиосигнал, отражаемый целью при
облучении её РЛ(отраженный). В зависимости
от типа используемого радиосигнала
различают пассивные метод РЛ, метод
активного ответа (по ответному сигналу),
метод активного ответа(по отраженному
сигналу).
8. Пассивный метод рл и его возможности.
Радиосигнал, излучаемый РПД, устройством на цели не зависимо от РЛ.
1 – измерение Д. Д=c*t, в данной формуле за место t записывается , при этом методе измерение Д невозможно т.к. не известно время излучения.
2 – Измерение
скорости
![]() измерение радиальной скорости таким
методом не возможно т.к. не известна
частота излучения.
измерение радиальной скорости таким
методом не возможно т.к. не известна
частота излучения.
3- Измерение угловых
координат. В принципе возможно, т.к. для
оценки
![]() начальное
(опорное) значение
начальное
(опорное) значение
![]() всегда известно(=0)
всегда известно(=0)
![]()
9 . Активные метод рл по ответному сигналу и его возможности.
1- Измерение Д.
Возможно. Д=c*t,
в данной формуле за место t
записывается
![]() ,
,
![]() - известно(время прохождения запр-го
сигнала по цепям самолетного ответчика.
- известно(время прохождения запр-го
сигнала по цепям самолетного ответчика.
2 – измерение радиальной скорости.
![]() ;частота
излучения известна. Измерение доплеровской
частоты возможно, если частота запросного
сигнала в ответчике не изменяется.
;частота
излучения известна. Измерение доплеровской
частоты возможно, если частота запросного
сигнала в ответчике не изменяется.
![]()
![]()
3 – измерение угловых координат производится путем реализации принципа измерения как в предыдущем методе(пассивный).
1 0. Активный метод рл по отраженному сигналу и его возможности(основной метод рл).
1- Измерение Д.
Возможно. Д=c*t,
в данной формуле за место t
записывается
![]() ,
,
![]()
![]() ;
Где
;
Где
![]() - время запаздывания отр-го относительно
зондирующего.
- время запаздывания отр-го относительно
зондирующего.
2 – измерение радиальной скорости.
![]() ;
;
3 – измерение угловых координат производится путем реализации принципа измерения как в предыдущем методе(пассивный).
11. Физические причины, порождающие задачу обнаружения рл сигнала.
В большинстве практических случаев в пределах рабочей зоны РЛС находятся большое количество целей или цели и объекты, создающие пассивную помеху.
12. Постановка задачи обнаружения сигнала: используемые модели рл сигнала и действующей помехи.
Согласно принципу
обнаружения необходимо обнаружить
сигнал со
случайной амплитудой и фазой(начальными)
и неизвестными параметрами:
![]() ,
особенность обнаружения радиолокационной
цели по рл сигналу состоит в следующем:
,
особенность обнаружения радиолокационной
цели по рл сигналу состоит в следующем:
1 – РЛ сигнал всегда принимается совместно с помехой. 2 – РЛ сигнал часто очень мал и соизмерим с мощностью помехи. Это приводит к ошибкам обнаружения цели. Принято считать, что обнаружитель является оптимальным, если он работает с мин. вероятностями ошибок. В радиолокации обнаружитель считается оптимальным, если он обеспечивает макс. вероятность обнаружения при допустимой вероятности ложной тревоги. Помеха принимается в виде белого шума.
Обнаружитель:
Работа обнаружителя:
1) U(t)
– входной сигнал. 2)
![]() 3)
3)
![]()
4)![]()
1 3.
Критерий эффективности обнаружителя
РЛ сигнала.
3.
Критерий эффективности обнаружителя
РЛ сигнала.
Эффективность
обнаружения цели(сигнала) оценивается
количественно следующими характеристиками:
1) Вероятность обнаружения
![]() ,
где
,
где
![]() некоторое пороговое значение.
2)Дальность обнаружения.
некоторое пороговое значение.
2)Дальность обнаружения.
14. Алгоритм функционирования оптимального обнаружителя РЛ сигнала.
Работа обнаружителя: 1) U(t) – входной сигнал. 2) 3)
4)
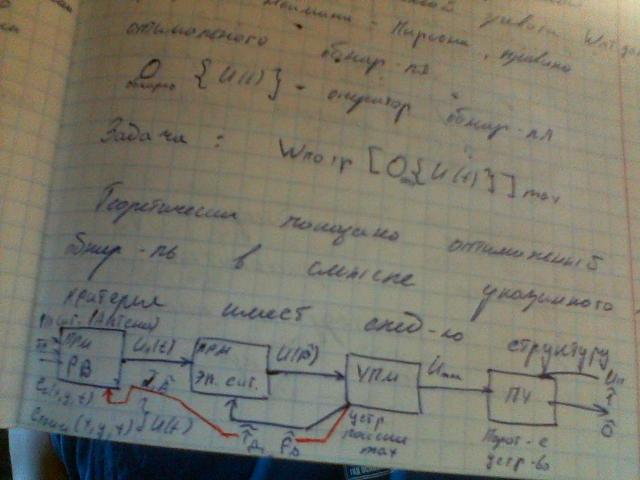
15. Структурная схема и принцип действия обнаружителя РЛ сигнала.
П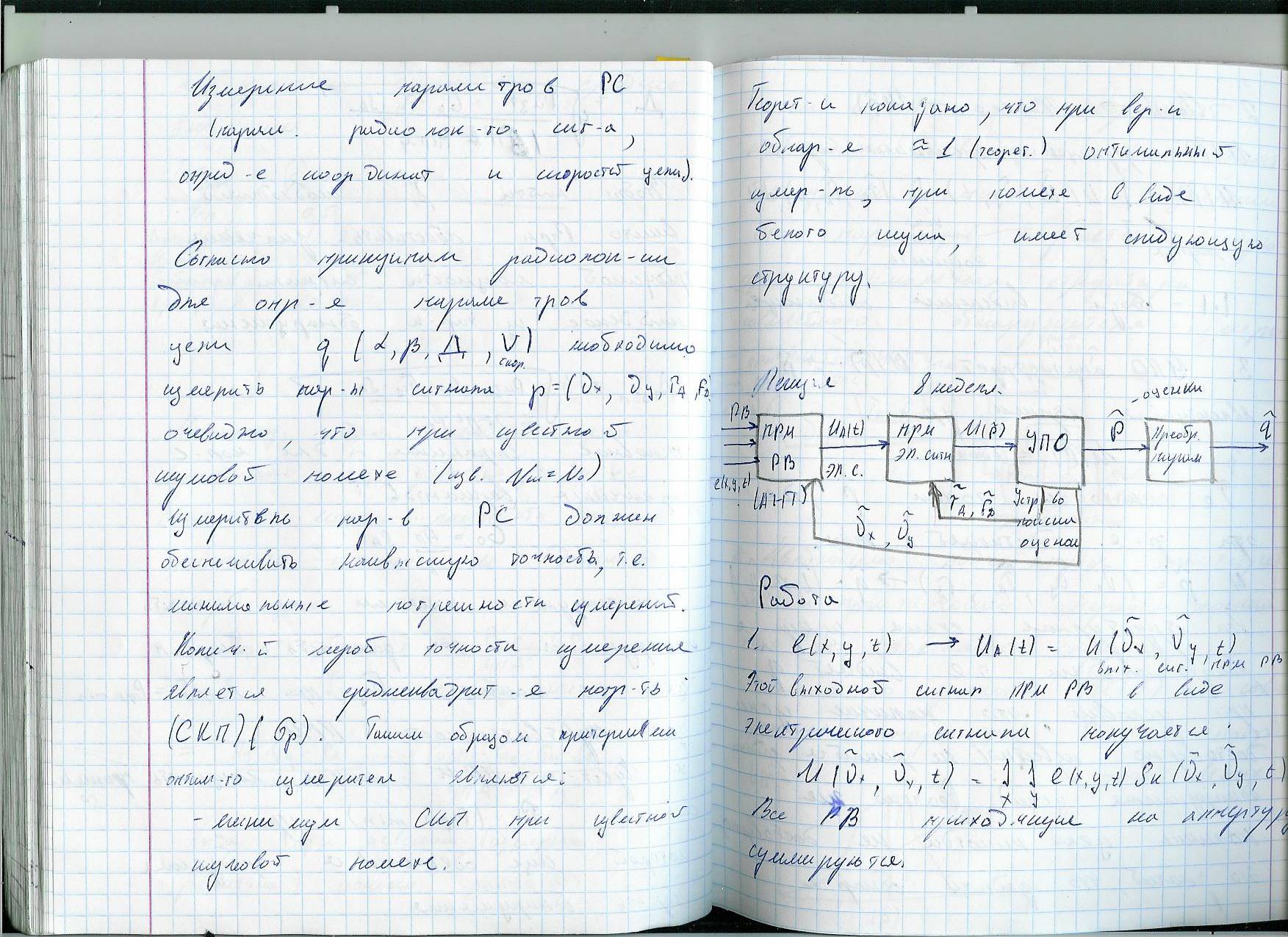 ри
вероятности обнаружения =1, оптимальный
измеритель, при помехе в виде белого
шума, имеет следующую структуру:
ри
вероятности обнаружения =1, оптимальный
измеритель, при помехе в виде белого
шума, имеет следующую структуру:
Работа:
1)
![]()
![]()
![]()
Все радиоволны приходящие на апертуру антенны суммируются, на выходе ПРМ РВ получаем электрический сигнал.
2) Далее сигнал
преобразуется в
![]()
3)УПО анализирует
![]() и находит точку
и находит точку
![]() где
функция достигает максимума.
где
функция достигает максимума.
4)
![]()
16. Зависимость вероятностей обнаружения и ложной тревоги от параметров обнаружителя.
Вероятность обнаружения:
, где некоторое пороговое значение.
Вероятность ложной тревоги:
![]() спектральная
плотность мощности помехи
спектральная
плотность мощности помехи
17. Рабочие характеристики обнаружителя: определение и применение.
Д альность обнаружения, мощность излучения, плотность потока мощности
![]() ;
G0 – коэффициент
направленного действия антенны (отношение
квадрата напряженности поля, создаваемого
антенной в данном направлении, к среднему
значению квадрата напряженности поля
по всем направлениям)
;
G0 – коэффициент
направленного действия антенны (отношение
квадрата напряженности поля, создаваемого
антенной в данном направлении, к среднему
значению квадрата напряженности поля
по всем направлениям)
Вероятность обнаружения:
, где некоторое пороговое значение.
Вероятность ложной тревоги:
спектральная плотность мощности помехи