

Составление уравнений кинетостатики
Кинетостатический анализ начинается с последней группы.
Последняя группа (ВВП)
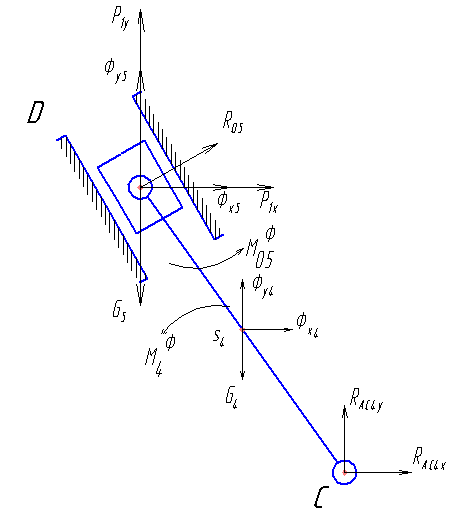
Рис.4.1. Группа ВВП
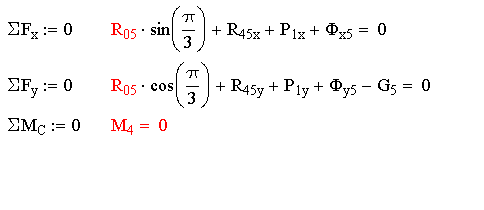
Уравнения равновесия:

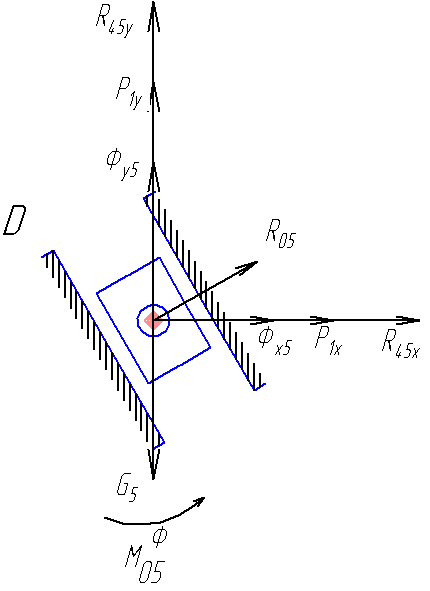
Рис.4.2. Поступательная пара
Уравнения
равновесия:
Предпоследняя группа (ВВП)
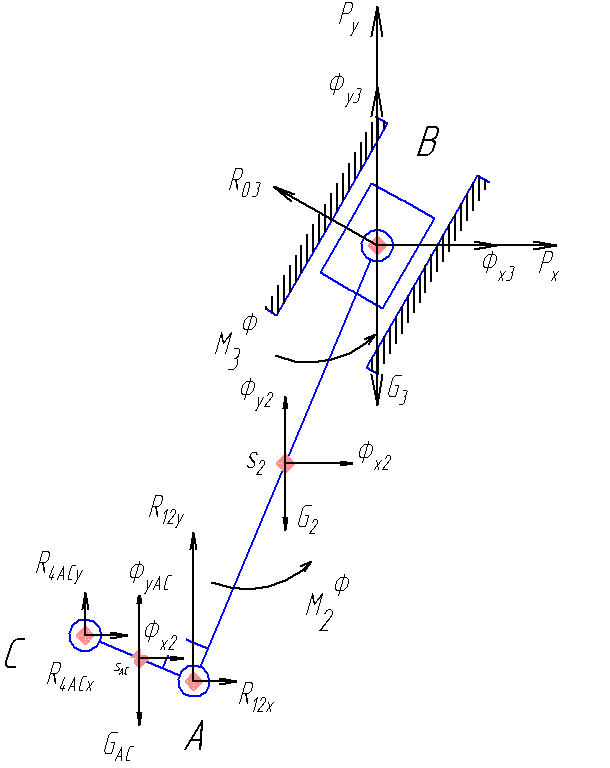
Рис.4.3. Группа ВВП
Уравнения равновесия:
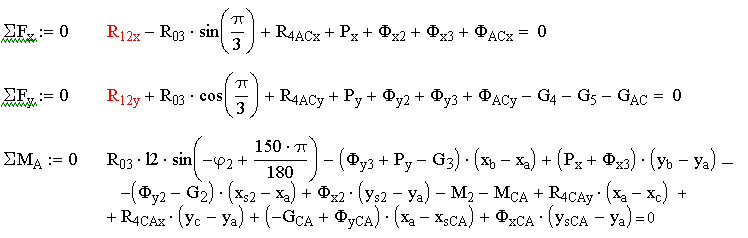
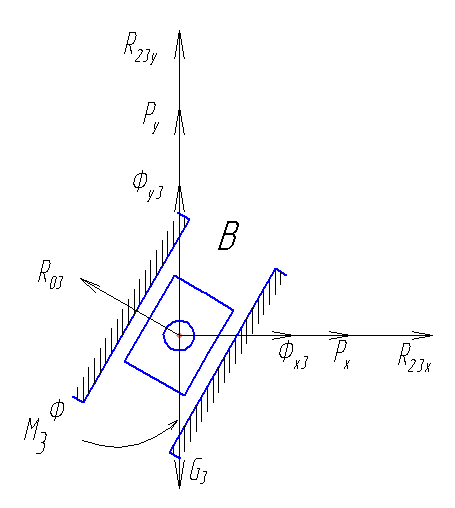
Рис.4.4. Поступательная пара
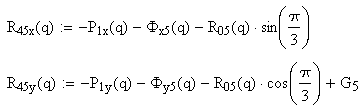
Уравнения равновесия:
Также учитывается, что
![]()
![]()
Первая группа (кривошип)
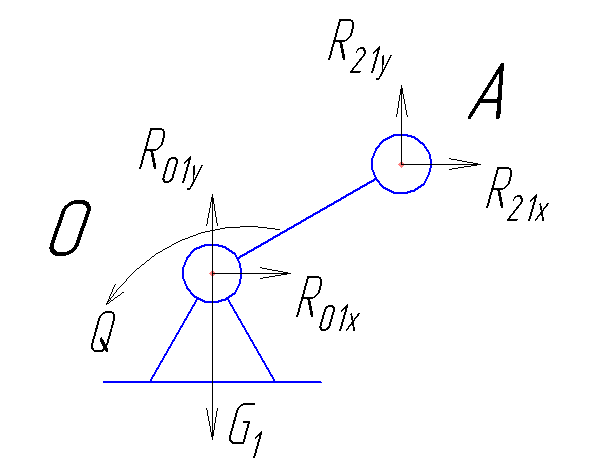
Рис.4.5. Кривошип
Уравнения равновесия:

Также учитывается, что
![]()
![]()
5. Аналитическое решение уравнений кинетостатики
5.1.Решение систем уравнений методом Крамера.
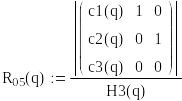
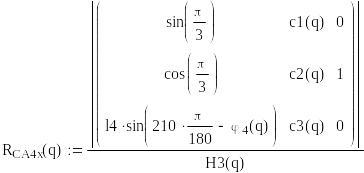
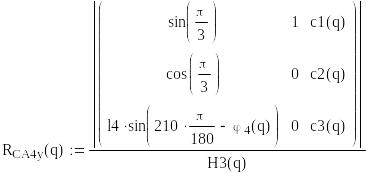
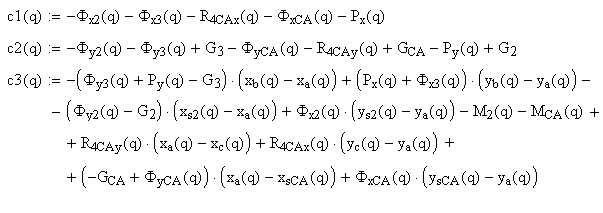
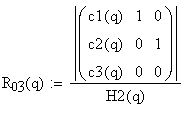
1)Нахождение неизвестных R05, RCA4x, RCA4y, R45x, R45y.
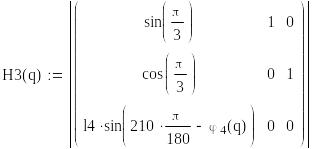
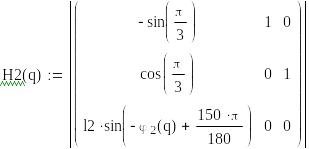
Определитель системы:

Полная реакция
![]() .
.
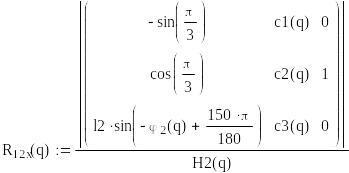
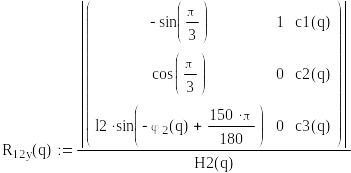
2)Нахождение неизвестных R03, R23x, R23y, R12x, R12y.
Определитель системы:
Полная реакция
![]() .
.
3)Нахождение неизвестных R01х, R01у, Q.
![]()
![]()
Обобщённая движущая сила
![]()
5.2 Проверка аналитического решения.
Проверка аналитического решения производится составлением уравнения Д’Аламбера-Лагранжа.
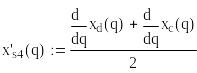
Скорости центров тяжести:
![]()
![]()
![]()
![]()
Уравнение Д’Аламбера-Лагранжа относительно Q:

5.3 Сравнение методов.
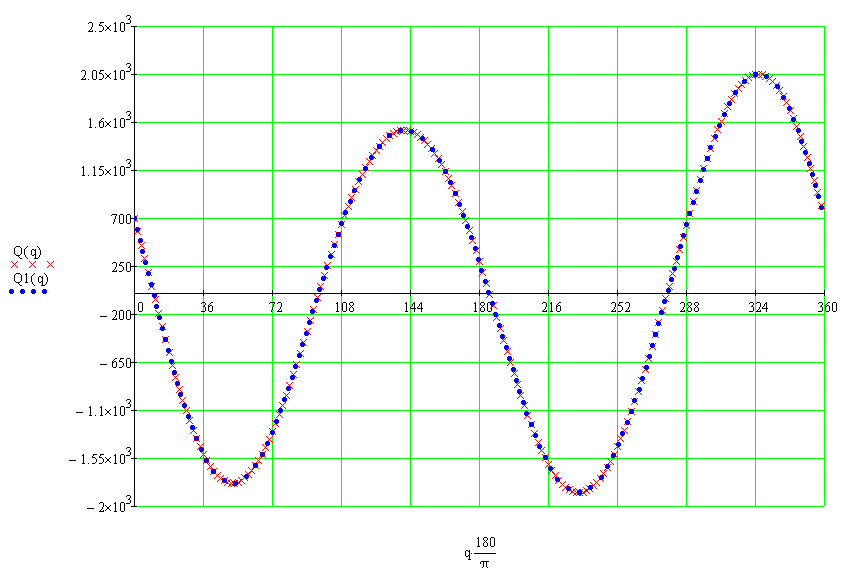
Рис.5.1. График зависимости обобщённой движущей силы от обобщённой координаты
6. Графическое решение уравнений кинетостатики
Графоаналитический способ силового расчёта включает в себя построение плана сил для каждой группы, начиная с последней. Для каждой группы составляется векторное уравнение равновесия приложенных к ней сил и на основе анализа направления каждого вектора строится план сил.
Крайняя группа.
![]()
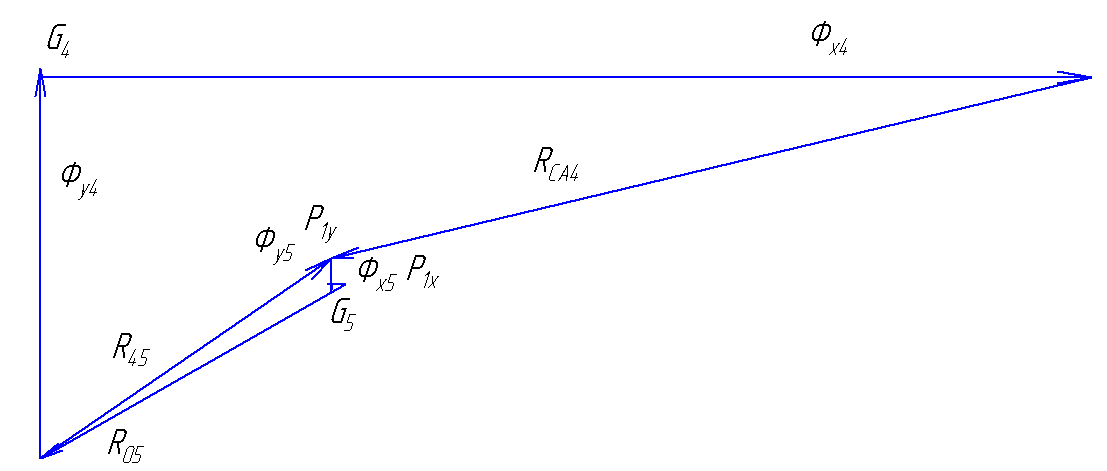
Рис.6.1. План сил для крайней группы
![]()
![]()
Предпоследняя группа.
![]()
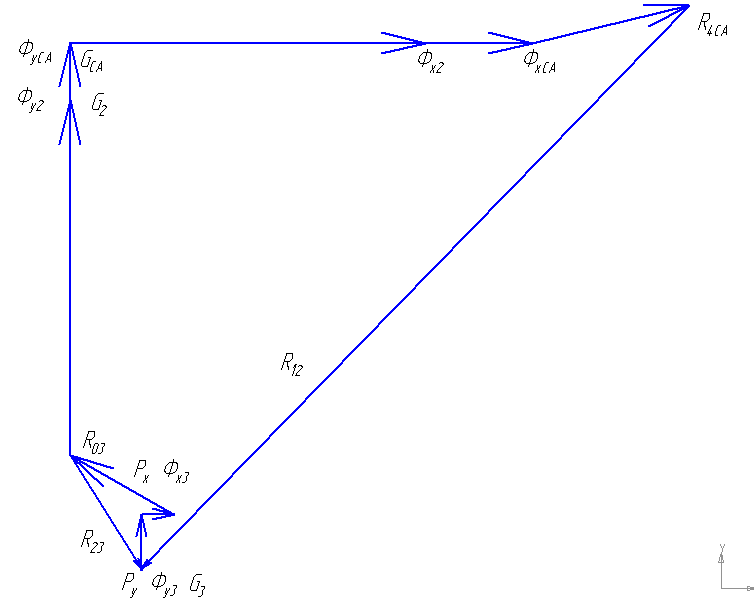
Рис.6.2. План сил для предпоследней группы
Первая группа.
![]()
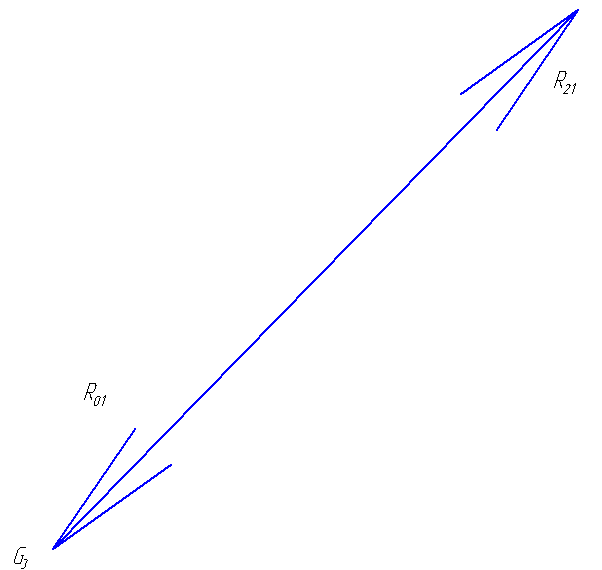
Рис.6.2. План сил для предпоследней группы
![]()
7. Сравнение результатов расчётов, полученных разыми методами
В таблице
Реакции |
Графический метод, Н |
Аналитический метод, Н |
Погрешность, % |
|
4293 |
4295 |
4,6∙10-4 |
|
9508 |
9512 |
4∙10-4 |
|
7910 |
7917 |
9∙10-4 |
|
46282 |
46290 |
17∙10-5 |
|
46261 |
46260 |
2∙10-5 |
8. Выводы
В данной курсовой работе, в первой её части, был проделан полный геометрический анализ механизма, в ходе которого были решены групповые уравнения, определены все функции положения механизма, построены: план 12-ти положений механизма, а также графики зависимостей функций положения от обобщённой координаты. Для одного положения было приведено численное решение групповых уравнений.
После этого в результате кинематического анализа были аналитически определены аналоги скоростей и ускорений, построены: планы скоростей и ускорений для одного положения, а также графики производных функций положения по обобщённой координате.
Также было сделано сравнение двух методов (аналитического и графоаналитического). Были сделаны выводы о достоверности полученных результатов.
Во второй части курсовой работы сначала были определены массы звеньев механизма, силы (тяжести, инерции), моменты. Затем путём составления и аналитического решения уравнений кинетостатики были определены все реакции, а также обобщённая движущая сила. Последняя также была найдена при помощи уравнения Д’Аламбера-Лагранжа, после чего путём анализа совмещённых графиков обобщённых движущих сил, полученных разными методами, был сделан вывод о правильности решения.
После аналитического решения кинетостатических уравнений, было сделано аналитическое решение уравнений статики. После этого было сделано сравнение реакций, полученных двумя методами, на данном этапе также был сделан вывод о правильности решения и точности обоих методов.
Большая часть вычислений была сделана с использование программы MathCad, построение же чертежей и создание механизма было выполнено в Kompas 3D, оформление пояснительной записки было сделано при помощи MS Word.