

7. Сравнение результатов расчётов, полученных разными методами.
Таблица сравнения выражений для аналогов скоростей, полученных двумя методами:
|
Аналитический метод |
Графоаналитический метод |
||
30° |
Крайнее положение |
30° |
Крайнее положение |
|
|
-34.915 |
-22,596 |
-34,67 |
-22,6 |
|
6.989 |
-34,616 |
6,9 |
-34,75 |
|
9.746 |
-15,22 |
9,68 |
-15,22 |
|
-17.833 |
-0,83 |
-17,7 |
0 |
Таблица сравнения выражений для аналогов ускорений, полученных двумя методами:
|
Аналитический метод |
Графоаналитический метод |
||
30° |
Крайнее положение |
30° |
Крайнее положение |
|
|
-3072 |
5345 |
-3074 |
5345,25 |
|
-5627 |
-1704 |
-5617.5 |
1704,7 |
|
-2547 |
-1169 |
-2539 |
1168,64 |
|
-2547 |
3289 |
-293,8 |
3292,2 |
Часть II
Введение.
Вторая часть включает в себя:
• определение масс звеньев, сил тяжести и сил инерции;
• составление и решение уравнений кинетостатики;
• графоаналитическое решение уравнений кинетостатики;
• нахождение обобщённой движущей силы двумя способами и проверка
• а также: сравнение реакций, полученных разными методами
2. Исходные данные
Рис. 2.1 Схема V-образного двигателя
ОА = 0,1 м;
АВ = 0,4 м;
АС = 0,1 м;
CD = 0,4 м;
ω = 160 с-1.
3. Определение задаваемых сил и сил инерции
Задачей кинетостатического расчета механизма является определение реакций в кинематических парах и движущего момента Q с учетом сил инерции подвижных звеньев.
3.1 Массы звеньев, входящих в механизм.
Массы рассчитываются по формуле:
![]() (3.1)
(3.1)
где
μ = 30 кг/м – погонная масса;
![]() длина
звена.
длина
звена.
Для кривошипа и шатунов:
![]()
![]()
![]()
![]()
Для ползунов:
![]()
![]()
Силы тяжести.
Силы тяжести, действующие на каждое звено, вычисляются по формуле:
![]() (3.2)
где
(3.2)
где
![]() ускорение
свободного падения, м/с2
ускорение
свободного падения, м/с2
![]()
![]()
![]()
![]()
![]()
![]()
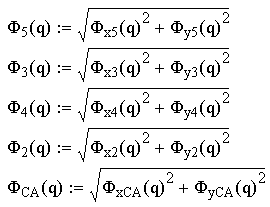
3.3 Определение координат центров тяжести звеньев.
Допущение: массы распределены в звеньях равномерно, центры тяжести находятся посередине звеньев.
![]()
![]()
![]()
![]()
![]()
![]()
где
![]()
![]()
![]()
![]()
– функции положения точек А и С.
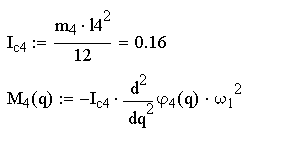
3.4 Ускорения центров тяжести.
Для их определения дважды дифференцируются выражения для координат центров тяжести по обобщённой координате.
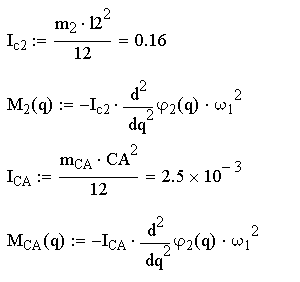
3.5 Силы инерции, действующие на подвижные звенья механизма

Полные выражения для сил инерции:
Выражения для моментов инерции
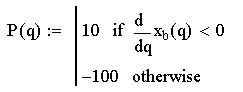
3.7 Задание рабочей нагрузки.
При задании рабочей нагрузки необходимо учитывать следующие условия:
Мощность выходного звена должна быть отрицательна (т.е. знак рабочей нагрузки должен быть противоположен скорости выходного звена (в данном случае ползуна, 5-го звена)).
По заданию во время холостого хода нагрузка должна быть - 10 (Н), во время рабочего хода – 100 (Н).
Программа для определения и построения зависимости P(q):
 –
для
ползуна 3;
–
для
ползуна 3;
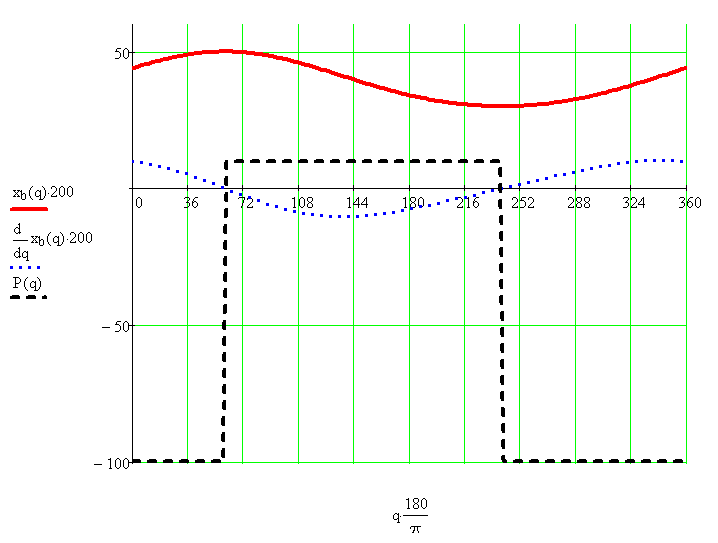
Рис.3.1. График зависимости рабочей нагрузки от обобщённой координаты для звена 3
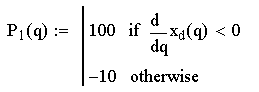 –
для
ползуна 5;
–
для
ползуна 5;
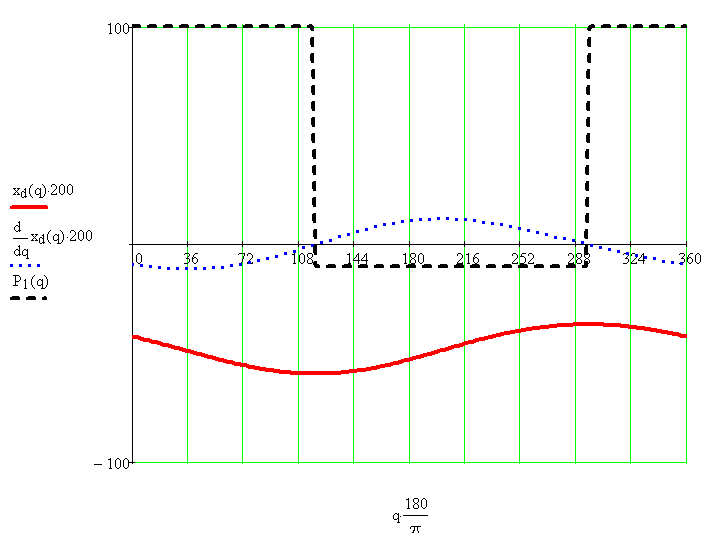
Рис.3.2. График зависимости рабочей нагрузки от обобщённой координаты для звена 5
![]()
![]()
![]()
![]()
На основе анализа построенных зависимостей видно, что учтены все требования к рабочей нагрузке.