5. Кинематический анализ.
Целью кинематического анализа является определение скоростей и ускорений отдельных точек и звеньев рычажного механизма по известному закону входного звена.
Путём дифференцируя уравнения дважды по q уравнения геометрического анализа, находятся аналоги скоростей и ускорений данного механизма.
5.1 План скоростей и ускорений
Рис.5.1. Положение механизма при 30°
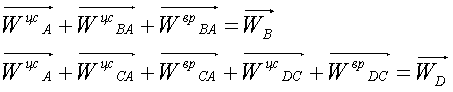
Сумму векторов можно представить как :
![]()
Производная по времени от каждого полученного векторного уравнения:

Полученные выражения можно представить в виде:
![]()
4. Построение плана скоростей:
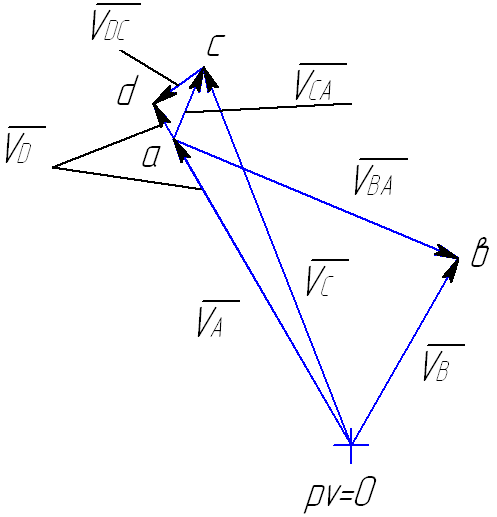
Рис.5.2. План скоростей для положения 30°
Производную по времени от каждого полученного векторного уравнения:
Полученные выражения можно представить в виде:
4. Построение плана ускорений:
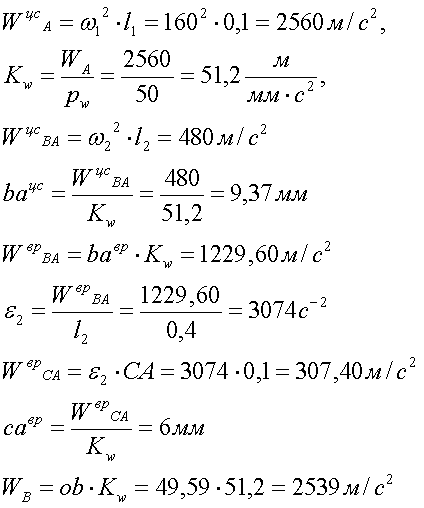
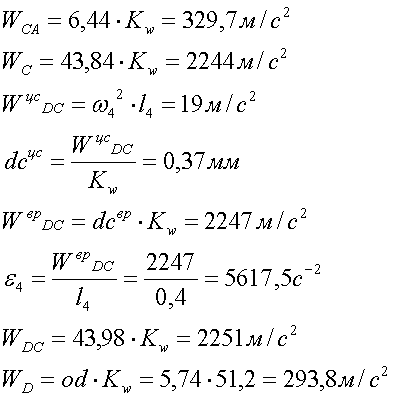
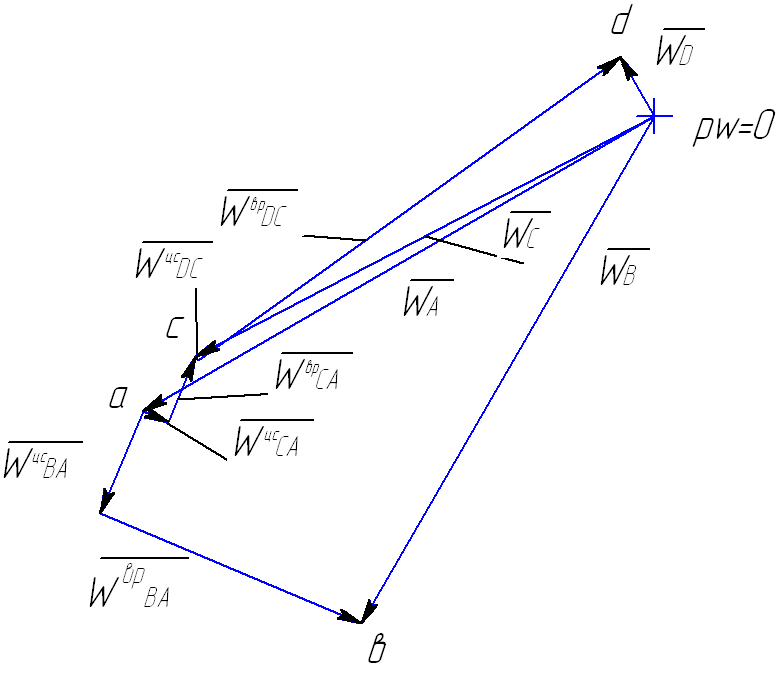
Рис.5.3. План ускорений для положения 30°
Аналогично для крайнего положения.
Построение плана скоростей:
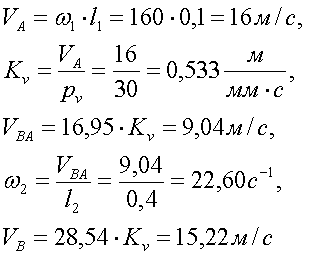
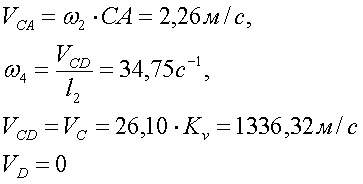
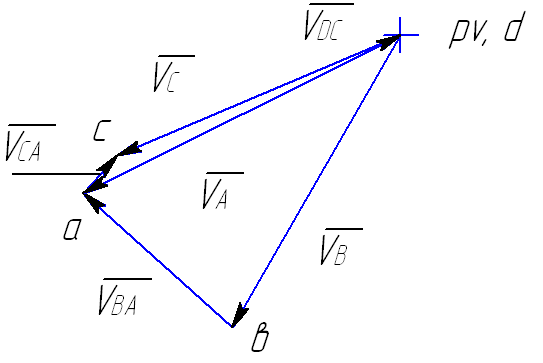
Рис.5.4. План скоростей для крайнего положения
Построение плана ускорений для крайнего положения:
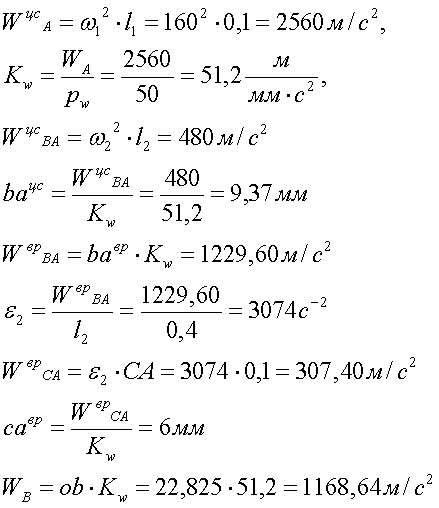
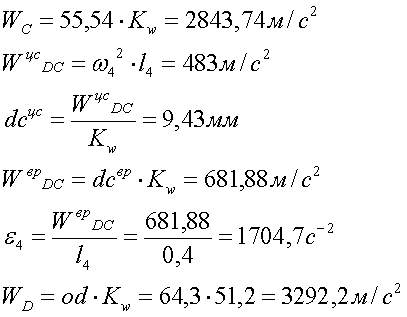
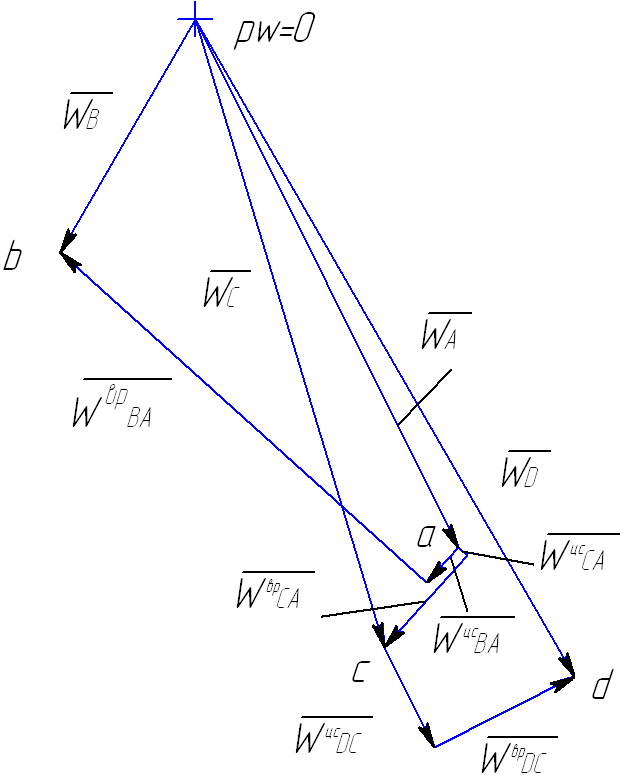
Рис.5.5. План ускорений для крайнего положения
5.2 Аналитическое определение аналогов скоростей и ускорений.
А) Для определения аналогов скоростей берутся первые производные от групповых уравнений по обобщённой координате (q), для первой группы:
![]() , (5.1)
, (5.1)
Корни уравнений находятся по метод Крамера:
 , (5.2)
, (5.2)
 . (5.3)
. (5.3)
Решение в общем виде:
![]() – аналог скорости точки В, (5.4)
– аналог скорости точки В, (5.4)
![]() – аналог угловой скорости звена 2. (5.5)
– аналог угловой скорости звена 2. (5.5)
Значение аналога скорости точки В и аналога угловой скорости звена 2 при входной координате q=30°:
x`в= 0,03 ,
φ`2= – 0,218 .
Б) Аналогичный расчёт производится для второй группы:
![]() , (5.6)
, (5.6)
Корни уравнений находятся по метод Крамера:
 , (5.7)
, (5.7)
 . (5.8)
. (5.8)
Решение в общем виде:
![]() – аналог скорости точки D,
(5.9)
– аналог скорости точки D,
(5.9)
![]() – аналог угловой скорости звена 4.
(5.10)
– аналог угловой скорости звена 4.
(5.10)
Значение аналога скорости точки В и аналога угловой скорости звена 2 при входной координате q=30°:
x`D= –0,056 ,
φ`4= 0,044 .
В) Для определения аналогов ускорений берутся вторые производные от групповых уравнений по обобщённой координате (q), для первой группы:
![]() , (5.11)
, (5.11)
Корни уравнений находятся по метод Крамера:
![]() , (5.12)
, (5.12)
![]() . (5.13)
. (5.13)
Решение в общем виде:
![]() – аналог ускорения точки В, (5.14)
– аналог ускорения точки В, (5.14)
![]() – аналог углового ускорения звена
2. (5.15)
– аналог углового ускорения звена
2. (5.15)
Значение аналога ускорения точки В и аналога углового ускорения звена 2 при входной координате q=30°:
x``в= -0,05 ,
φ``2= – 0,12 .
Г) Аналогичный расчёт производится для второй группы:
![]() ,(5.16)
,(5.16)
Корни уравнений находятся по метод Крамера:
![]() , (5.17)
, (5.17)
![]() . (5.18)
. (5.18)
Решение в общем виде:
![]()
– аналог ускорения точки D, (5.19)
![]() – аналог углового ускорения звена
4. (5.20)
– аналог углового ускорения звена
4. (5.20)
Значение аналога ускорения точки D и аналога углового ускорения звена 4 при входной координате q=30°:
x``D= 5697 ,
φ``4= – 5627 .
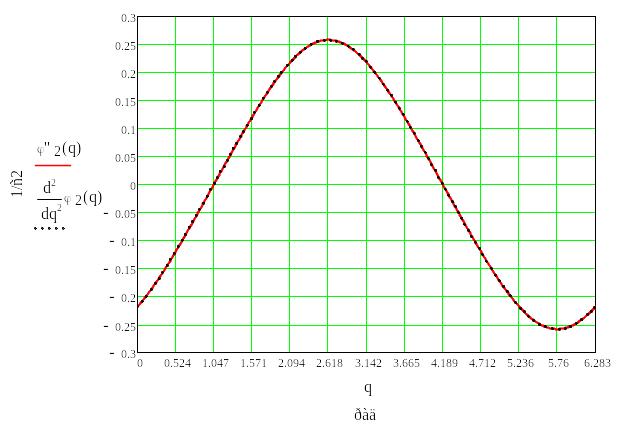
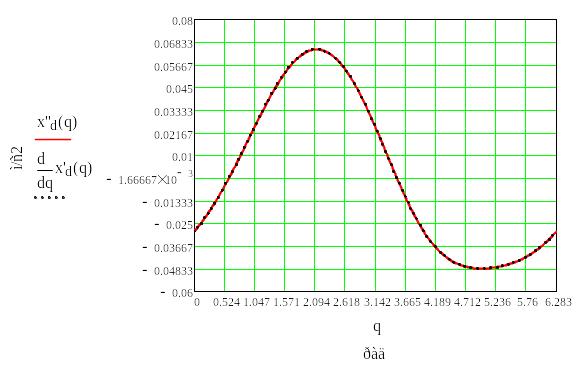
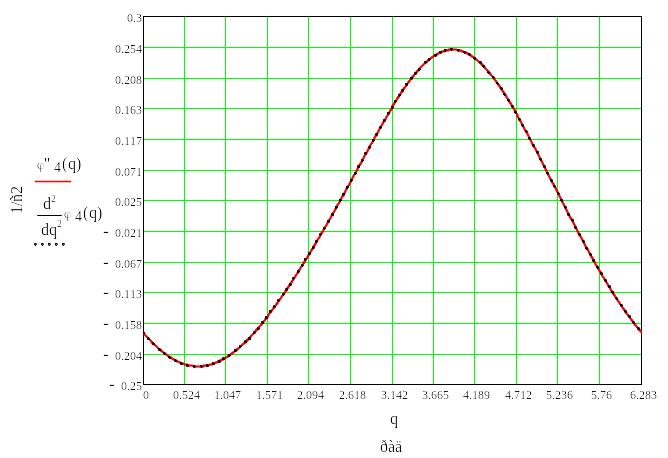
6. Графики функции положеия и её производных по обощённой координате.
Полученные графики являются совмещенными графики производных функций положения и функций, полученных раскрытием определителей.
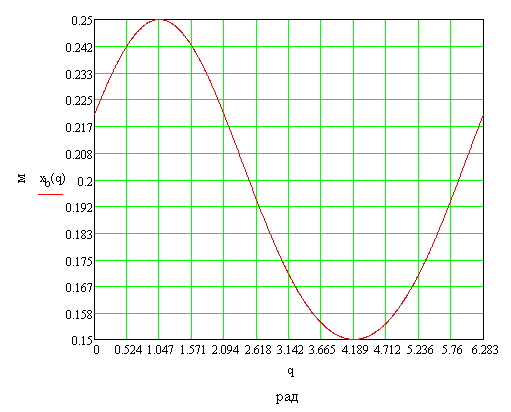
Рис.6.1. График функции положения хв
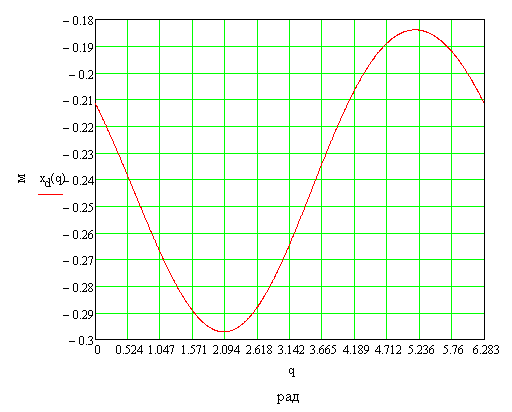
Рис.6.2. График функции положения xD
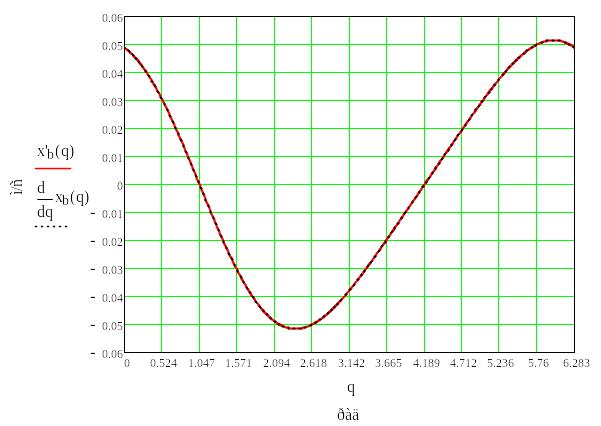
Рис.6.3. График производной функции положения точки В
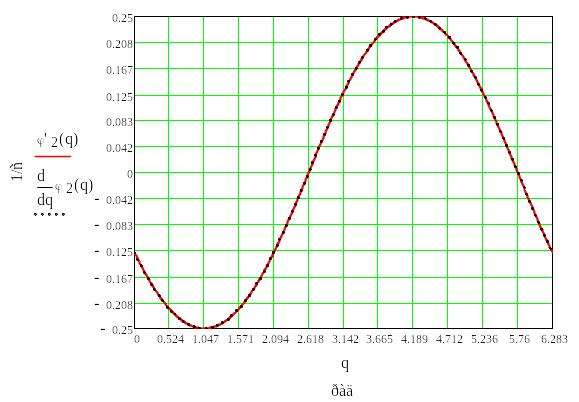
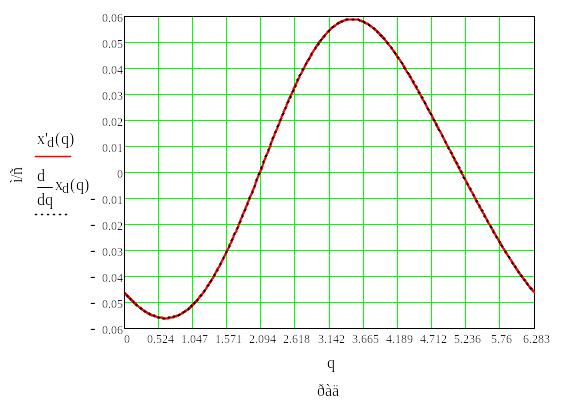
Рис.6.5. График производной функции положения точки D
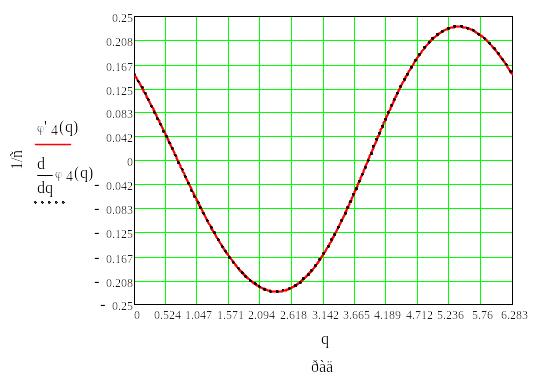
Рис.6.6. График угловой скорости звена 4
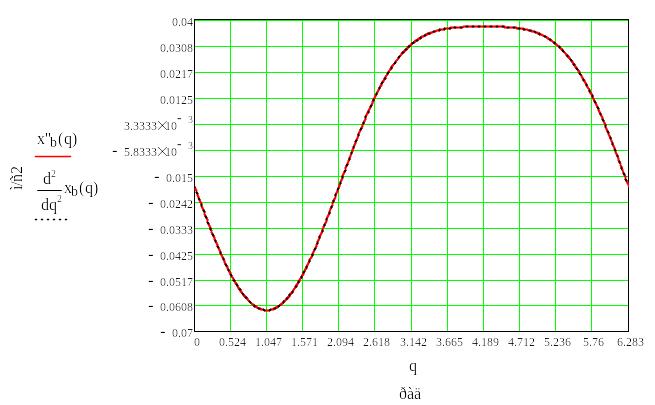
Рис.6.7. График второй производной функции положения точки В