

Оглавление
Часть I 4
1. Введение 4
2. Исходные данные 5
3. Структурный анализ 6
3.1 Структурная схема механизма 6
3.2 Состав механизма 7
3.3 Число степеней подвижности 7
3.4 Граф механизма, выявление структурных групп и граф структуры 8
4. Геометрический анализ 9
4.1 План 12-ти положений механизма 9
4.2 Групповые уравнения и их решение 10
5. Кинематический анализ. 13
5.1 План скоростей и ускорений 13
5.2 Аналитическое определение аналогов скоростей и ускорений. 21
6. Графики функции положеия и её производных по обощённой координате. 24
7. Сравнение результатов расчётов, полученных разными методами. 29
Часть II 31
1. Введение. 31
2. Исходные данные 31
3. Определение задаваемых сил и сил инерции 32
3.1 Массы звеньев, входящих в механизм. 32
3.3 Определение координат центров тяжести звеньев. 34
3.4 Ускорения центров тяжести. 34
3.5 Силы инерции, действующие на подвижные звенья механизма 36
3.6 Выражения для моментов инерции 37
3.7 Задание рабочей нагрузки. 37
4. Составление уравнений кинетостатики 40
5. Аналитическое решение уравнений кинетостатики 46
5.1.Решение систем уравнений методом Крамера. 46
5.2 Проверка аналитического решения. 49
6. Графическое решение уравнений кинетостатики 52
7. Сравнение результатов расчётов, полученных разыми методами 55
8. Выводы 56
Часть I
1. Введение
Целью данной курсовой работы является изучение принципов работы заданного механизма, а также определение некоторых его характеристик и параметров.
Данный курсовой проект делится на две части. Первая часть включает в себя:
структурный анализ (вычисление степень подвижности механизма; составление его графов; выделение структурных групп; введение функции положения и т.д.);
геометрический анализ (план 12-ти положений механизма в масштабе; составление и решение групповых уравнений, для одного положения - численное);
кинематический анализ (план скоростей и ускорений для двух положений, включая одно крайнее; аналитическое определение аналогов ускорений и скоростей, для одного положения - численное);
а также: построение графиков функций положения и их производных по обобщенной координате и сравнение результатов, полученных разными методами;
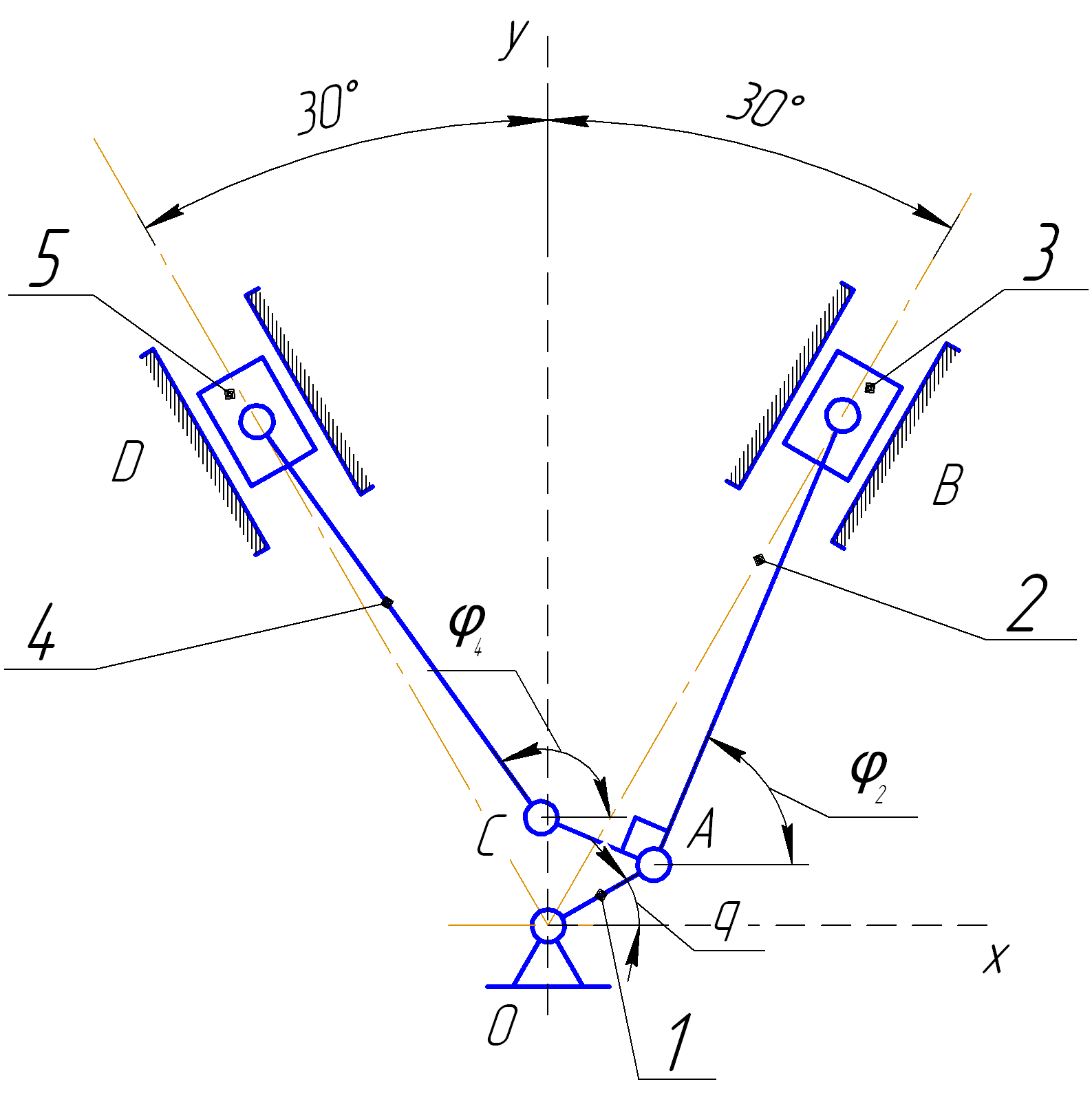
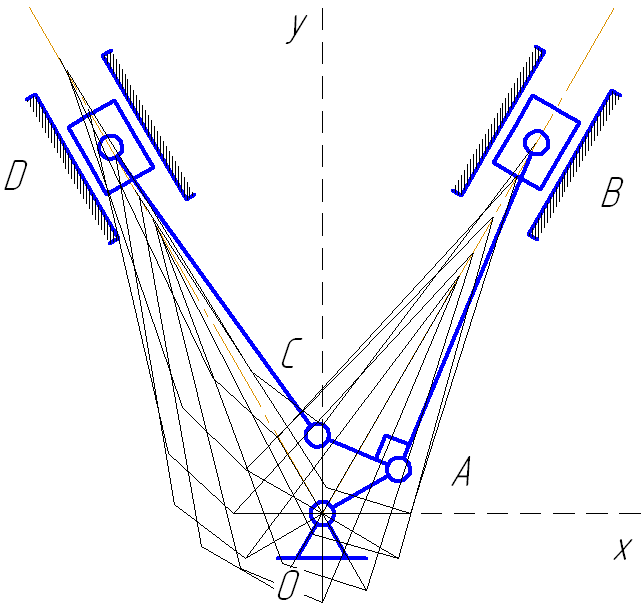
2. Исходные данные
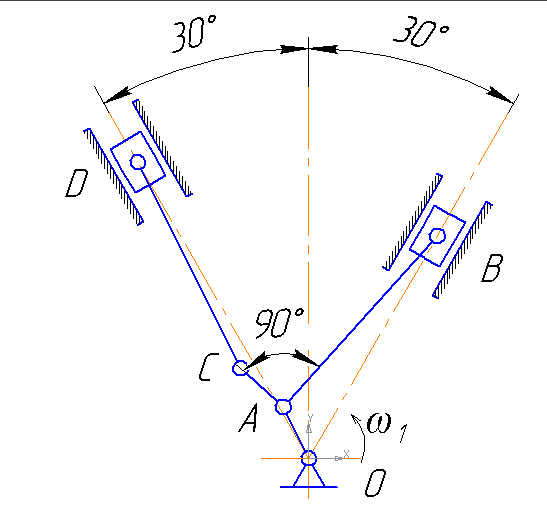
Рис. 2.1 Схема V-образного двигателя
ОА = 0,1 м;
АВ = 0,4 м;
АС = 0,1 м;
CD = 0,4 м;
ω = 160 с-1.
3. Структурный анализ
Целью структурного анализа механизма является определение количества звеньев и кинематических пар, классификация кинематических пар, определение их подвижности и степени подвижности механизма, а также выделение в нем структурных групп – кинематических цепей, у которых число входов совпадает с числом степеней подвижности.
3.1 Структурная схема механизма
3.2 Состав механизма
Механизм состоит из шести звеньев:
0 – стоика и направляющие – неподвижное звено;
1 – кривошип, совершающий вращение вокруг неподвижной оси;
2,4 – шатуны, совершающие плоское движение;
3,5 – ползуны, совершающие возвратно-поступательное движение.
Количество подвижных звеньев N = 5.
Количество входов n = 1.
3.3 Число степеней подвижности
Число степеней подвижности Wп определяется по формуле Чебышёва (3.1):
![]() (3.1)
(3.1)
![]()
где:
N=5 – число подвижных звеньев механизма;
pН=7 – число низших кинематических пар;
рВ=0 – число высших кинематических пар.
Таким образом, рассматриваемый механизм нормальный, поскольку число входов совпадает с числом степеней подвижности (Wп=n), что позволяет провести геометрический анализ.
3.4 Граф механизма, выявление структурных групп и граф структуры
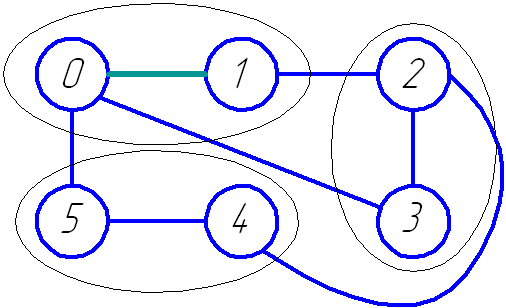
Рис. 3.1 Граф механизма
В ходе анализа механизм был разбит на структурные группы. Граф структуры изображён на рисунке 3.2.

Рис. 3.2 Граф механизма
Выявлено 3 структурные группы:
0-1 – однозвенная одноподвижная группа;
2-3 – ВВП, двухзвенная 0-подвижная группа;
4-5 – ВВП, двухзвенная 0-подвижная группа.
4. Геометрический анализ
Задачами геометрического анализа механизма являются: построение функции положения выходных звеньев, исследование функции положения и построение графиков.
4.1 План 12-ти положений механизма
4.2 Групповые уравнения и их решение
Для первой группы:
![]() (4.1)
(4.1)
Решение системы в общем виде. Формулы (4.2) были выведены в результате решения системы уравнений:
 ,
,
![]()
![]() ,
,
 , (4.1)
, (4.1)
где:
xB – функция положения выходного звена 3,
φ2 – угол, определяющий положение звена 2.
Значение функции положения и угла наклона звена при входной координате q=30°:
хв=0,242м,
φ2=1,173рад.
Для второй группы:
![]() , (4.3)
, (4.3)
где:
![]() координаты
движения точки С.
координаты
движения точки С.
или
![]()
Решение системы в общем виде. Формулы (4.4) были выведены в результате решения системы уравнений:
![]()
![]()
![]()
где:
 ’
’
![]()
![]() ,
,
 , (4.4)
, (4.4)
где:
xD – функция положения выходного звена 5,
φ4 – угол, определяющий положение звена 4.
Значение функции положения и угла наклона звена при входной координате q=30°:
xD = – 0,239м,
φ4=2,193рад.