

9 .2. Расчетная схема и дифференциальные уравнения
Как
двухфазные, так и трехфазные асинхронные
электродвигатели принято описывать
системой дифференциальных уравнений
в неподвижной системе координат
![]() .
При этом трезхфазные машины
приводят к двухфазным по методике,
изложенной в п.4.3. Расчетная схема АД
представлена
на рис.9.1.
.
При этом трезхфазные машины
приводят к двухфазным по методике,
изложенной в п.4.3. Расчетная схема АД
представлена
на рис.9.1.
Система дифференциальных уравнений имеет вид

ЭДС вращения, вводимые в уравнения обмоток ротора, определяются как
![]()
Потокосцепления обмоток машины

где
![]() ,
,
![]() - коэффициенты
самоиндукции обмоток статора и ротора,
- коэффициенты
самоиндукции обмоток статора и ротора,
![]() - коэффициент взаимоиндукции между
контурами статора и ротора
при совпадении их осей. Уравнение
равновесия моментов
- коэффициент взаимоиндукции между
контурами статора и ротора
при совпадении их осей. Уравнение
равновесия моментов
![]()
При записи через потокосцепления pi токи электромагнитный момент для трехфазного АД
![]()
Нелинейная система уравнений (9.1) - (9.5) может быть решена на ЭВМ численными методами.
9.3. Уравнения состояния и структурная схема асинхронного электродвигателя
Заменяя токи в выражении (9.5) получаем
Систему уравнений АД (9.1) - (9.5) представим записанной в форме Коши, одновременно заменяя токи обмоток через функции потокосцеплений. Из системы уравнений (9.2) находим
![]()
Подставляем полученные значения токов и момента в уравнения (9.1) и (9.3), обозначая
![]()
Получаем
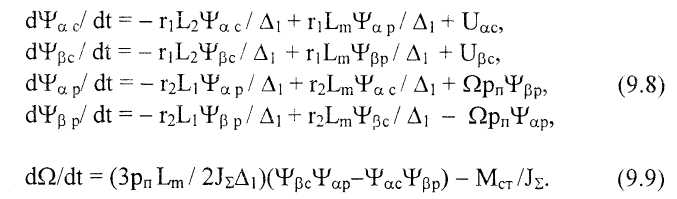
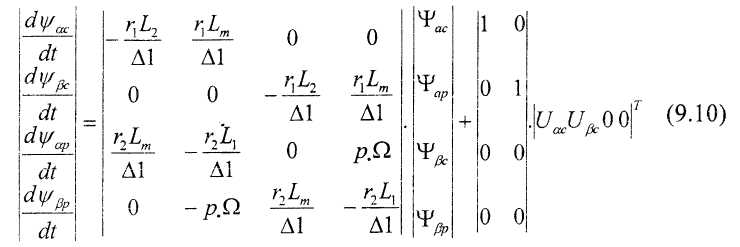
Уравнения (9.8)-(9.9) можно рассматривать как уравнения состояния АД. В качестве переменных состояния здесь выступают проекции потокосцеплений на ортогональные оси и угловая частота вращения ротора. Внешними воздействиями на двигатель являются напряжения статора (образующие вектор управления) и момент сил сопротивления (вектор возмущений). Так как уравнения (9.8) - (9.9) нелинейны (содержат произведения переменных состояния) и решения в общем виде не имеют переходные процессы АД исследуют обычно моделированием на ЭВМ. Для удобства составления алгоритма моделирования уравнения равновесия напряжений можно записать в матричной форме.
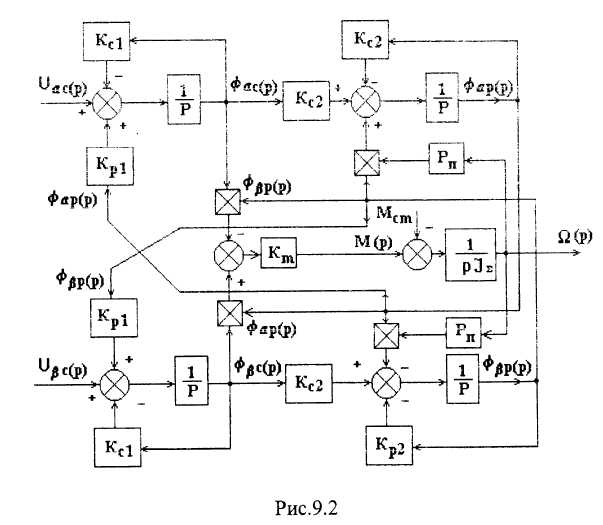
Структурную схему АД можно построить, если перейти от системы дифференциальных уравнения (9.8)-(9.9) к операторным уравнениям. Для удобства изображения структурной схемы вводим следующие обозначения
![]()
Структурная схема АД представлена на рис.9.2,
9.4. Передаточная функция асинхронного электродвигателя
Рассмотрим динамику работы АД при управлении напряжением, подаваемом на обмотку статора. Электромагнитными переходными процессами пренебрегаем и рассматриваем только электромеханический процесс, В общем виде момент вращения электродвигателя является функцией частоты вращения и напряжения на зажимах обмотки статора, а статический момент сопротивления зависит от частоты вращения. Уравнение движения
![]()
Изменение напряжения, подаваемого на обмотку статора, на AU вызывает соответствующие изменения моментов и частоты вращения:
![]()
В этих выражениях
![]()
Подставляем полученные выражения в (9.12),получаем
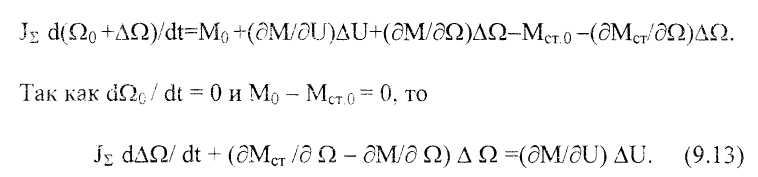
Разделим все члены уравнения (9.13) на множитель (Mст / M/ ) и введем следующие обозначения:
J /(Mст / M/ ) = Тэм - электромеханическая постоянная времени переходных процессов,
(M/U) /(Mст / M/ ) = kдв - коэффициент передачи электродвигателя. Получаем
![]()
Полученное дифференциальное
уравнение движения ротора переводим в
операторную форму заменой мгновенных
значений величин их интегральными
отображениями и оператора
![]() на
оператор Лапласа
.
Получаем
на
оператор Лапласа
.
Получаем
![]()
При единичном сигнале
![]() ,
,
![]() .
Таким образом, передаточная
функция АД при управлении напряжением,
подаваемом на обмотку статора, имеет
вид
.
Таким образом, передаточная
функция АД при управлении напряжением,
подаваемом на обмотку статора, имеет
вид
![]()
Следует иметь в виду, что kдв и Тэм переменные параметры, значения которых зависят от точки на механической характеристике, около которой происходит регулирование.
Передаточная функция АД при частотном регулировании. Получить точное выражение передаточной функции АД, отражающей электромагнитные и механические переходные процессы при частотном регулировании, не представляется возможным, потому что имеют место существенные нелинейности, связанные с преобразованием управляющего сигнала в частоту напряжения, питающего электродвигатель. Вопрос осложняется также наличием двух контуров регулирования по двум взаимосвязанным входам - амплитуде и частоте напряжения. Попытки аналитического выражения процессов при изменении частоты питающего напряжения далеко нельзя считать завершенными и даже полностью разрешимыми /60/. Поэтому для электроприводов с частотным управлением особое значение имеют методы моделирования на ЭВМ.
С перечисленными ниже
допущениями делается вывод передаточной
функции частотно регулируемого
асинхронного электропривода.
Рассматривается ненагруженная машина
с Мст
= 0. Это позволяет принять установившиеся
значения токов ротора равными нулю
![]() ,
,
![]() .
Вводится расчетный намагничивающий
ток
.
Вводится расчетный намагничивающий
ток
![]()
Считают, что намагничивающий
ток, как при холостом ходе, так и под
нагрузкой содержит только реактивную
составляющую. При
малых изменениях частоты напряжения
![]() будет
изменяться только
активная составляющая тока ротора,
реактивной составляющей
пренебрегают. Пренебрегают величинами
второго порядка малости.
Таким образом, исследуется вращение
ротора в магнитном поле
постоянной амплитуды, вращающемся с
заданной частотой при скачкообразном
изменении частоты питающего напряжения.
Передаточная
функция при принятых условиях
будет
изменяться только
активная составляющая тока ротора,
реактивной составляющей
пренебрегают. Пренебрегают величинами
второго порядка малости.
Таким образом, исследуется вращение
ротора в магнитном поле
постоянной амплитуды, вращающемся с
заданной частотой при скачкообразном
изменении частоты питающего напряжения.
Передаточная
функция при принятых условиях
![]()
где a= r2 /L2; b = Lm /L2; d = 2 J/(3 p2 Lm); I0 -установившееся значение тока намагничивания.
Передаточная
функция АИД. Передаточная
функция АИД имеет
вид (9.16) с учетом того, что коэффициент
передачи и электромеханическая
постоянная времени зависят от коэффициента
управления
![]() ,
равного отношению напряжения управления
к напряжению возбуждения (Расчётная
схема АИД приведена на рис. 9,15).
Рекомендуются следующие зависимости
,
равного отношению напряжения управления
к напряжению возбуждения (Расчётная
схема АИД приведена на рис. 9,15).
Рекомендуются следующие зависимости

где Т0
= J0
/ Мп
- электромеханическая постоянная времени
при
коэффициенте управления
![]() .
.