

Режимы работы и характеристики
В зависимости от частоты подачи импульсов управления различают следующие режимы работы ШД: статический, квазистатический, установившийся и переходные.
Статический режим соответствует протеканию по одной из фазных обмоток постоянного тока, создающего неподвижное магнитное поле и характеризуется статическим синхронизирующим моментом, который в первом приближении можно считать синусоидальным.
Квазистатический режим (режим отработки единичных шагов) характеризуется тем, что переходный процесс (обычно колебательный), к началу следующего шага заканчивается, т. е. угловая скорость ротора в начале каждого следующего шага равна нулю. Он используется в различных стартстопных, лентопротяжных и других механизмах, где требуется фиксация ротора после каждого шага.
Установившийся режим работы ШД соответствует постоянной частоте управляющих импульсов.
Переходные режимы имеют место при пуске, торможении и реверсе ШД.
Обычно пуску ШД соответствует
скачкообразное изменение частоты
импульсов от нуля до рабочей. Переходный
процесс, как правило, идет с перерегулированием
по скорости. Максимальную частоту
управляющих импульсов, при которой
возможен пуск ШД без потери шага, называют
частотой приемистости
![]() .
Частота
растет с увеличением синхронизирующего
момента, уменьшением углового шага,
снижением постоянной времени обмоток
и нагрузки.
.
Частота
растет с увеличением синхронизирующего
момента, уменьшением углового шага,
снижением постоянной времени обмоток
и нагрузки.
Торможение ротора осуществляют скачкоообразным снижением частоты управляющих импульсов до нуля. Предельная частота управляющих импульсов, при которой торможение осуществляется без выбега, как правило, выше .
Реверс ШД производят путем изменения последовательности коммутации токов в фазах, т.е. изменением направления вращения поля статора. Предельная частота следования импульсов, при которой возможен реверс без потери синхронизма всегда ниже .
Силовые схемы шагового электропривода
На рисунке приведена силовая схема питания фаз ШД при однополярном управлении и параллельном включении фаз с транзисторными ключами.
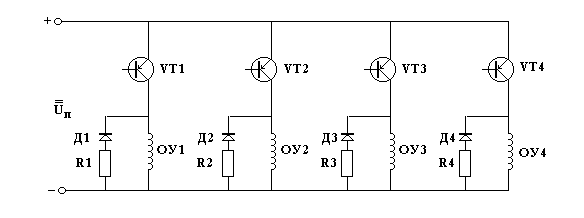
Другая схема представляет тиристорный
коммутатор с искусственной коммутацией.
Здесь тиристоры Т1-Т4 обеспечивают парную
коммутацию обмоток ШД ОУ1-ОУ4 при которой
в каждый момент включены 2 фазы из 4.
Тиристоры Т1-Т3, а также Т2-Т4 образуют
схемы двух триггеров, в которых
переключение тиристоров происходит с
помощью колебательных контуров
![]() .
Пусть тиристор Т1 открыт и запитана
обмотка ОУ1. Конденсатор
.
Пусть тиристор Т1 открыт и запитана
обмотка ОУ1. Конденсатор
![]() заряжен до напряжения питания с плюсом
на правой обкладке. Когда поступит
управляющий импульс на Т3, он откроется
и по обмотке ОУ3 потечет ток. В то же
время по цепи
заряжен до напряжения питания с плюсом
на правой обкладке. Когда поступит
управляющий импульс на Т3, он откроется
и по обмотке ОУ3 потечет ток. В то же
время по цепи
![]() происходит быстрый перезаряд конденсатора
и при смене знака тока через тиристор
Т1 последний закроется.
происходит быстрый перезаряд конденсатора
и при смене знака тока через тиристор
Т1 последний закроется.
Особенности динамики работы ШД.
Отработка единичного шага
Рассмотрим процесс отработки ШД единичного шага. Пусть в исходном положении ротор ШД находится в положении, показанном на рис. 1.
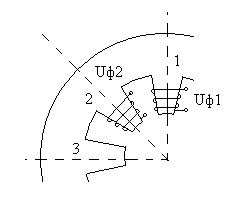
Снимаем напряжение управления с фазы
1 и подаем напряжение на фазу 2. Возникает
вращающий момент (момент синхронизации)
под действием которого ротор начинает
вращаться по направлению к фазе 2.
Величина момента определяется углом
рассогласования между продольной осью
ротора и осью поля (осью фазного выступа
2). Угол
![]() ,
отсчитываемый от оси фазного выступа
1, начинает расти. Появляется динамический
момент
,
отсчитываемый от оси фазного выступа
1, начинает расти. Появляется динамический
момент
![]()
По мере приближения к оси 2 момент вращения уменьшается и в момент совпадения осей становится нулевым.
Однако в этот момент динамический момент
достигает максимума и под его действием
ротор проходит равновесное состояние
и угол
становится больше
![]() .
Появляется тормозной момент. Ротор
тормозится, динамический момент падает
до нуля в момент достижения ротором
угла поворота
.
Появляется тормозной момент. Ротор
тормозится, динамический момент падает
до нуля в момент достижения ротором
угла поворота
![]() .
Ротор начинает движение назад и, если
бы не было сил трения, он вернулся бы в
исходное положение. На самом деле
происходит рассеивание энергии, так
как изменение магнитного сопротивления
при движении ротора приводит к появлению
переменной составляющей потока
возбуждения, что вызывает появление
ЭДС вращения в обмотках статора и,
соответственно, появление демпфирующего
момента.
.
Ротор начинает движение назад и, если
бы не было сил трения, он вернулся бы в
исходное положение. На самом деле
происходит рассеивание энергии, так
как изменение магнитного сопротивления
при движении ротора приводит к появлению
переменной составляющей потока
возбуждения, что вызывает появление
ЭДС вращения в обмотках статора и,
соответственно, появление демпфирующего
момента.
Уравнение движения ротора можно записать
![]() .
.
Здесь D – коэффициент
внутреннего демпфирования. Если
рассматривать движение относительно
нового положения, т.е заменить
на
![]() ,
то проведя линеаризацию можно представить
ШД на единичном шаге как звено второго
порядка
,
то проведя линеаризацию можно представить
ШД на единичном шаге как звено второго
порядка
![]() .
.
Колебания ротора – основной недостаток шагового привода, ограничивающий его применение или удорожающий его. Если качания ротора недопустимы, применяют старт-стопное управление.
Старт-стопное управление ШД.
С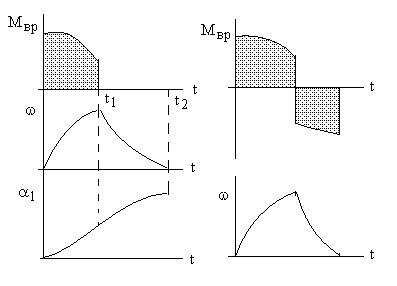 тарт-стопным
управление ШД называется такое управление,
при котором обеспечивается минимальная
динамическая ошибка. Необходимо, чтобы
энергия, запасенная ротором при разгоне,
была полностью израсходована в процессе
торможения. Торможение может быть
естественным или принудительным. В
первом случае, при движении ротора от
базы 1 к фазе 2 происходит отключение
обмотки 2 в момент
тарт-стопным
управление ШД называется такое управление,
при котором обеспечивается минимальная
динамическая ошибка. Необходимо, чтобы
энергия, запасенная ротором при разгоне,
была полностью израсходована в процессе
торможения. Торможение может быть
естественным или принудительным. В
первом случае, при движении ротора от
базы 1 к фазе 2 происходит отключение
обмотки 2 в момент
![]() ,
который выбирается так, чтобы накопленной
энергии было достаточно для перехода
ротора в положение, соответствующее
фазе 2 в момент
,
который выбирается так, чтобы накопленной
энергии было достаточно для перехода
ротора в положение, соответствующее
фазе 2 в момент
![]() .
После этого на фазу 2 вновь может быть
подано напряжение для удержания ротора
в новом положении.
.
После этого на фазу 2 вновь может быть
подано напряжение для удержания ротора
в новом положении.
Если естественного момента торможения недостаточно, можно применять принудительное торможение со стороны фазы 1. Фактически, здесь используется принцип оптимального, точнее, максимального по быстродействию управления – разгон с максимальным ускорением и торможение с максимальным замедлением.