11.3. Силовые схемы вентильных электроприводов
Электрические схемы вентильных электродвигателей можно подразделить на схемы с разомкнутой и схемы с замкнутой обмоткой якоря /88, 101/. Ряд схем силовой части вентильных электроприводов представлен на рис. 11.4, 11.5, 11.8, 11.9.
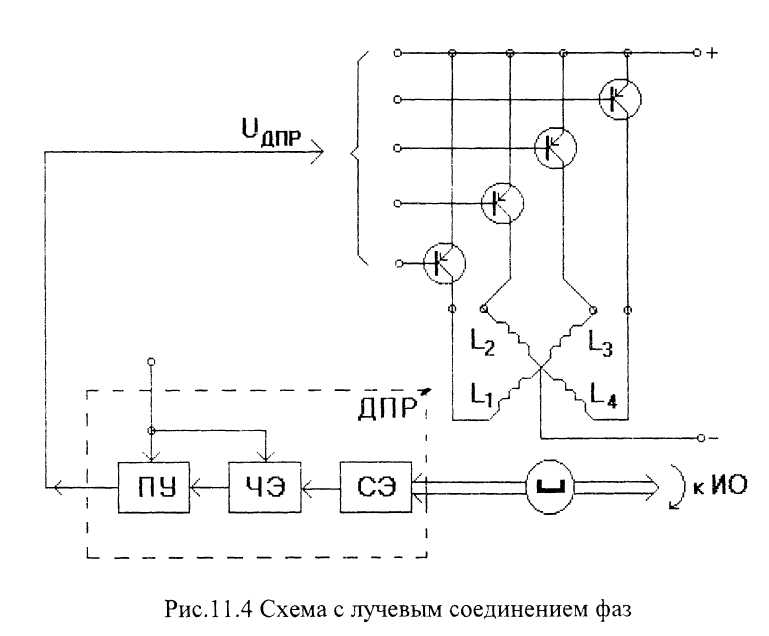
ПУ - преобразующее устройство, вырабатывающее сигналы для управления транзисторами. Преобразующее устройство представляет собой усилитель-выпрямитель или усилитель ограничитель, которые формируют однополярные или двуполярные импульсы
прямоугольной формы для управления полупроводниковыми ключами.
Такую схему имеет бесконтактный моментный электропривод с вентильным электродвигателем типа ДБМ с синусоидальной позиционной модуляцией питающего фазы напряжения.
Благодаря мостовой схеме
включения транзисторов имеется
возможность управлять направлением
тока в фазах, а также смещать эти токи
по фазе на угол
.
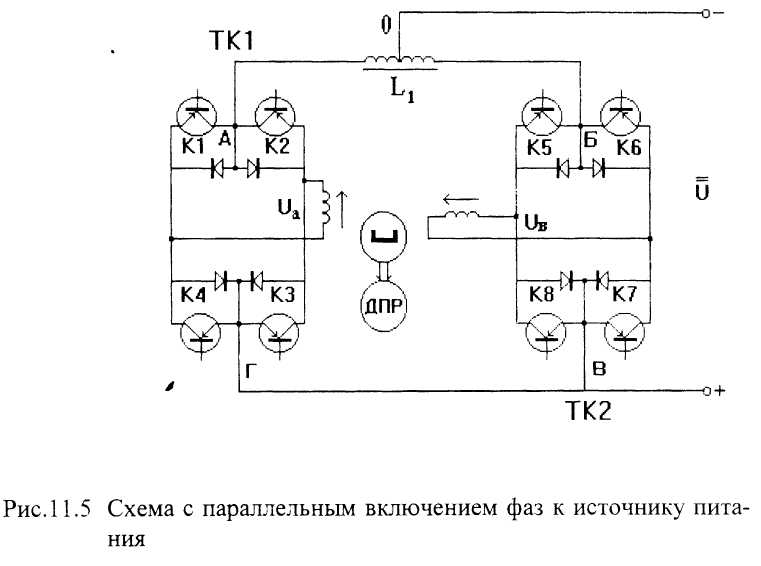
Дроссель
![]() выполняет роль сфазированной вольтодобавки
/35/. Суммируясь с напряжением питания,
напряжения вольтодобавки, возникающие
как ЭДС
выполняет роль сфазированной вольтодобавки
/35/. Суммируясь с напряжением питания,
напряжения вольтодобавки, возникающие
как ЭДС
![]() и
и
![]() обеспечивают питание секций якорной
обмотки напряжениями, совпадающими
по форме с ЭДС якорных обмоток. Следствием
этого является отсутствие пульсаций
токов
обеспечивают питание секций якорной
обмотки напряжениями, совпадающими
по форме с ЭДС якорных обмоток. Следствием
этого является отсутствие пульсаций
токов
![]() ,
,
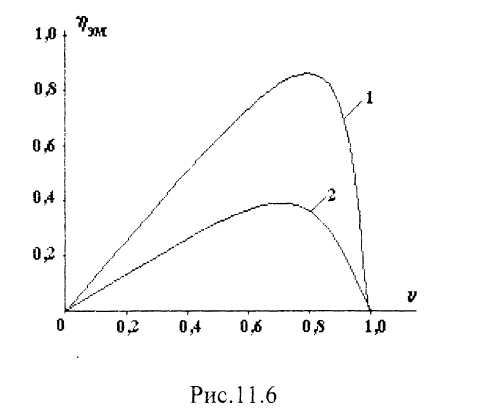
![]() фаз обмотки статора и высокий КПД
двигателя. На рис.11.6 представлена
зависимость электромагнитного КПД
вентильного электродвигателя при
различных частотах вращения для схемы
питания с дросселем (вольтодобавкой) и
без него (кривая 2). Эффективность
вольтодобавки очевидна. Электромагнитный
КПД учитывает только потери в обмотке
якоря.
фаз обмотки статора и высокий КПД
двигателя. На рис.11.6 представлена
зависимость электромагнитного КПД
вентильного электродвигателя при
различных частотах вращения для схемы
питания с дросселем (вольтодобавкой) и
без него (кривая 2). Эффективность
вольтодобавки очевидна. Электромагнитный
КПД учитывает только потери в обмотке
якоря.
![]()
В точке идеального холостого
хода
![]() электромагнитный КПД равен
нулю. Следует отметить, что включение
вольтодобавочного дросселя уменьшает
пульсации момента вращения.
электромагнитный КПД равен
нулю. Следует отметить, что включение
вольтодобавочного дросселя уменьшает
пульсации момента вращения.
В качестве управляющего воздействия для вентильных электродвигателей, так же как и для двигателей постоянного тока, используют изменение напряжения питания фаз. Однако меняют не
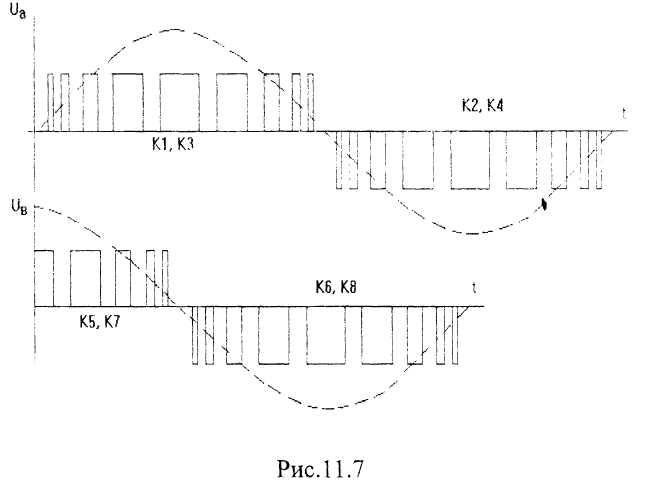
амплитуду напряжения, а применяют импульсные способы управления, при которых коммутатор дополнительно выполняет функции силового регулирующего органа. Технически наиболее просто реализуется широтно-импульсные способы управления, когда частота управляющих импульсов значительно превышает частоту коммутации фаз от ДПР. Широтно-импульсная модуляция позволяет получить квазисинусоидальные токи (см. рис. 11.7) и вращающееся магнитное поле.
Наилучшие результаты (повышение КПД и коэффициента использования) имеем при позиционной модуляции фазных напряжений по синусоидальному закону /35/.Принцип позиционной модуляции использован в системе питания обмоток электродвигателя ДСДА-40-6.
Схема с последовательным соединением фаз представлена на рис. 11.8. Диаграмма токов в фазах и диаграмма формирования магнитодвижущих сил аналогичны представленным на рис. 6.18. Очевидно, что при импульсном питании фаз поле статора вращается дискретно - вектор МДС занимает шесть положений за один оборот. Для снижения пульсаций вращающегося момента и улучшения плавности вращения ротора применяют и широтно-импульсную модуляцию токов фаз. Такая схема широко используется в последнее время для ряда электроприводов, например, для электропривода ПРБ-1 и ПРБ-2 с электродвигателем типа ДСТ
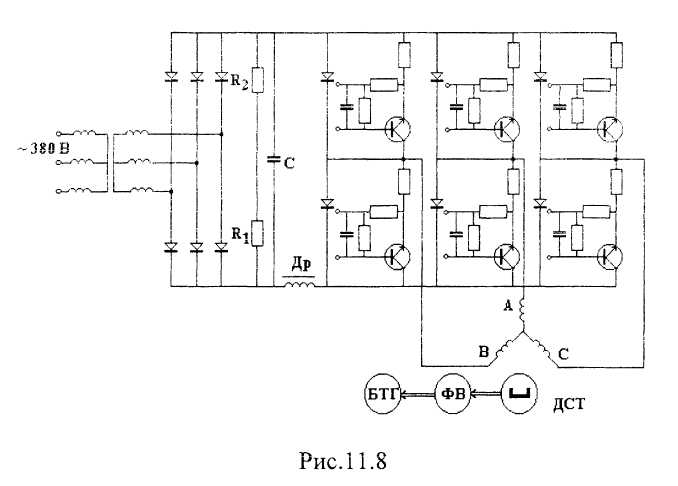
Схема силовой части электропривода ЭПБ - 1 с электродвигателем типа ДВУ представлена на рис.11.9.
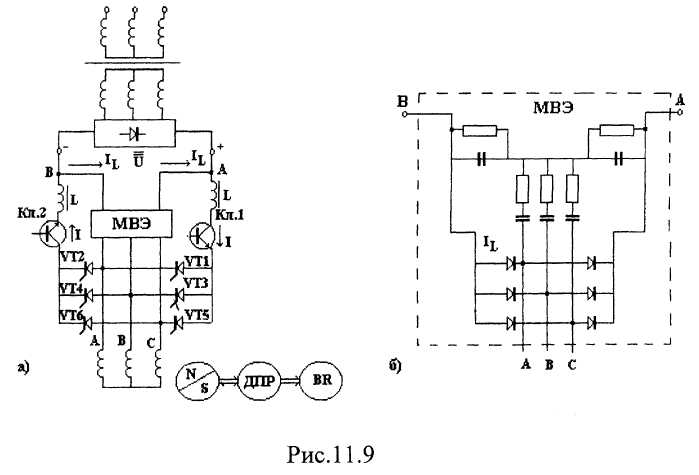
Ключи Кл.1 и Кл.2 выполняют две функции:
- обеспечивают режим коммутации тока тиристоров на малой частоте вращения ввиду невозможности самостоятельной коммутации (прерывания тока);
- обеспечивают поддержание в режиме широтно-импульсного модулирования (с частотой 1-2 кГц) заданной величины тока через обмотки электродвигателя, то есть участвуют в регулировании значения тока.
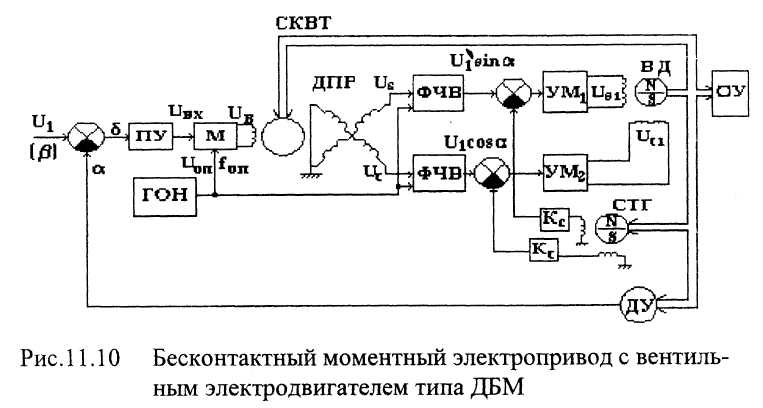
На рисунке:
- ПУ - предварительный усилитель,
- М - модулятор,
- ГОН - генератор опорных напряжений,
- СКВТ - бесконтактный синусо-косинусный вращающийся трансформатор, являющийся датчиком положения ротора,
- ФЧВ - физочувствительный выпрямитель (демодулятор),
- УМ1, УМ2 - усилители мощности,
- СТГ - синхронный тахогенератор,
- ДУ - датчик угла,
- ОУ - объект управления,
- ВД - вентильный электродвигатель.
При размыкании транзисторами Кл.1 и Кл.2 цепи питания обмотки статора ток, протекавший по цепи двух фазных обмоток, замыкается через два диода трехфазного вентильного моста возврата энергии (МВЭ) и осуществляет возврат реактивной энергии источнику питания, Тиристорный коммутатор обесточивается шесть раз каждый период. Можно отключать только один ключ (см. п.6.4).
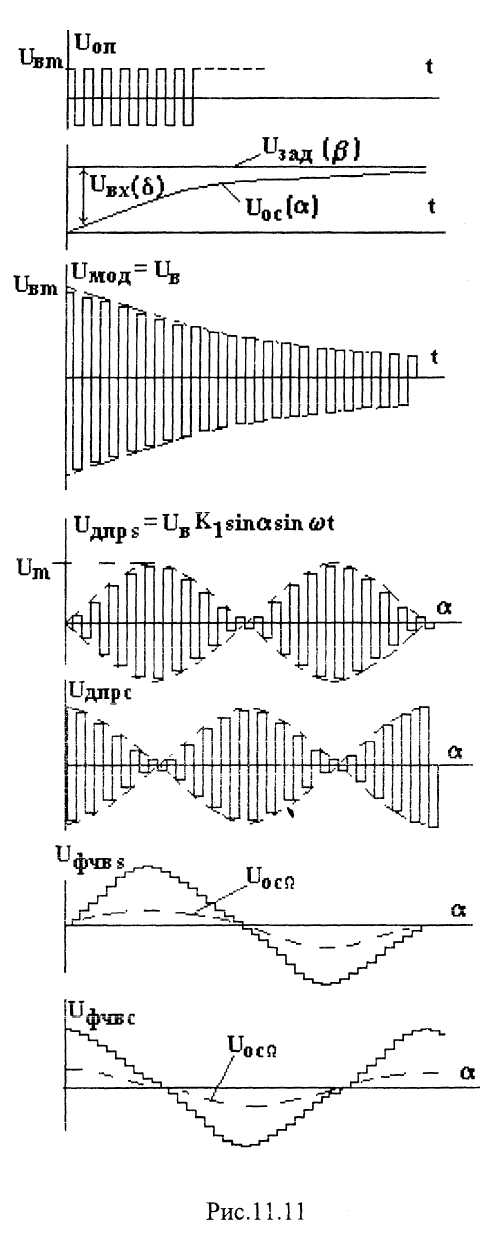
Диаграммы напряжений в элементах электропривода типа ДБМ представлены на рис. 11.11.
Разности напряжений
![]() поступают на усилители
мощности УМ1 и УМ2, а затем на фазы обмотки
статора. В тех случаях, когда требуется
большая мощность, схему питания
(рис.11.10) усложняют, вводя вместо усилителей
мощности широтно-импульсные модуляторы,
управляющие транзисторами схемы с
параллельным включением фаз к
источнику постоянного тока, рис.11.5. При
этом получается система управления
питающим напряжением с синусоидальной
модуляцией. Модулированные напряжения
фаз имеют вид, показанный на рис.11.7.
поступают на усилители
мощности УМ1 и УМ2, а затем на фазы обмотки
статора. В тех случаях, когда требуется
большая мощность, схему питания
(рис.11.10) усложняют, вводя вместо усилителей
мощности широтно-импульсные модуляторы,
управляющие транзисторами схемы с
параллельным включением фаз к
источнику постоянного тока, рис.11.5. При
этом получается система управления
питающим напряжением с синусоидальной
модуляцией. Модулированные напряжения
фаз имеют вид, показанный на рис.11.7.