

Механические характеристики электродвигателей
При рассмотрении работы электродвигателя. Приводящего в действие производственный механизм, необходимо, прежде всего, выявить соответствие механических свойств двигателя характеристике производственного механизма, поэтому для правильного проектирования и экономичной эксплуатации электропривода необходимо изучить эти характеристики.
Механическая
характеристика электродвигателя
– зависимость его частоты вращения от
вращающего момента
![]() или
или
![]() .
.
Степень изменения
частоты вращения (![]() )
с изменением момента у различных типов
электродвигателей неодинакова. Величина,
характеризующая это изменение называется
жесткостью
механической характеристики
(
)
с изменением момента у различных типов
электродвигателей неодинакова. Величина,
характеризующая это изменение называется
жесткостью
механической характеристики
(![]() ).
).
![]() или
или
![]()
![]()
Механически характеристики электродвигателей можно разделить на три основные категории в зависимости от жесткости ( ).
Абсолютно жесткая характеристика – это характеристика, при которой частота вращения с изменением момента остается неизменной. Например, синхронный двигатель (кривая 1).
Жесткая механическая характеристика – это характеристика, при которой частота вращения с изменением момента хотя и падает, но в малой степени. Например, двигатель постоянного тока независимого возбуждения (кривая 3) и асинхронный двигатель (кривая 2).
Мягкая механическая характеристика – это характеристика, при которой происходит значительное изменение частота вращения с изменением момента. Например, двигатель постоянного тока смешанного возбуждения (кривая 4) и последовательного возбуждения (кривая 5).
Механические характеристики производственных механизмов
Зависимость между скоростью (частотой) вращения и моментом сопротивления механизма называют механической характеристикой производственного механизма.
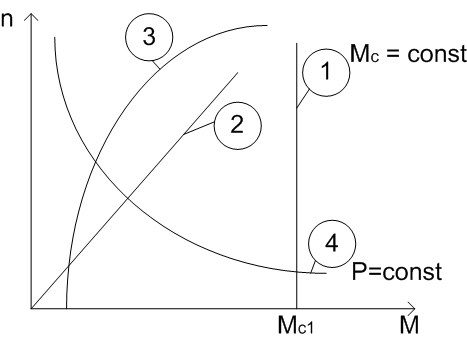
Прямая 1 – характеристика не зависит от частоты вращения, такой характеристикой обладает подъемные краны, лебедки, механизм подачи металлорежущих станков, то есть механизмы, у которых основной момент – момент трения.
![]()
где:
![]() - момент сопротивления.
- момент сопротивления.
Прямая 2 – линейно-возрастающая механическая характеристика такой характеристикой обладает генератор независимого возбуждения.
![]() или
или
![]() .
.
Кривая 3 – нелинейно-возрастающая характеристика.
![]() или
или
![]() ,
,
где: х=2 – вентилятор,
х=3 – насос.
Кривая 4 – нелинейно-спадающая механическая характеристика, при этом момент сопротивления изменяется обратно пропорционально частоте вращения, а мощность, потребляемая механизмом, остается постоянной (например: некоторые токарные и фрезерные станки).
![]() или
или
![]() .
.
Все эти четыре вида механических характеристик могут быть описаны эмпирической формулой Бланка:
![]() ,
,
где:
![]() - момент сопротивления производственного
механизма;
- момент сопротивления производственного
механизма;
![]() -
момент сопротивления трения в движущихся
частях механизма;
-
момент сопротивления трения в движущихся
частях механизма;
![]() - момент сопротивления
при номинальной угловой скорости
;
- момент сопротивления
при номинальной угловой скорости
;
х – показатель степени, порядковый номер характеристика.
Различают два вида статических моментов и нагрузок: реактивные и активные.
Реактивными моментами обладает почти все механизмы моменты которых препятствуют движению.
Например: характерным примером реактивных моментов являются моменты и силы трения. В этих механизмах моменты и силы сопротивления направлены против движения.
Лишь небольшая группа механизмов может создавать активные моменты. Эти механизмы могут не только препятствовать движению, но и при определенных условиях и сами проводить в движение систему.
Например: характерным механизмом с активным моментом являются лебедки. В этих механизмах момент имеет одно направление и не меняется с изменением направления вращения.
