

11.2. Момент вращения вентильного электродвигателя
Рассмотрим формирование
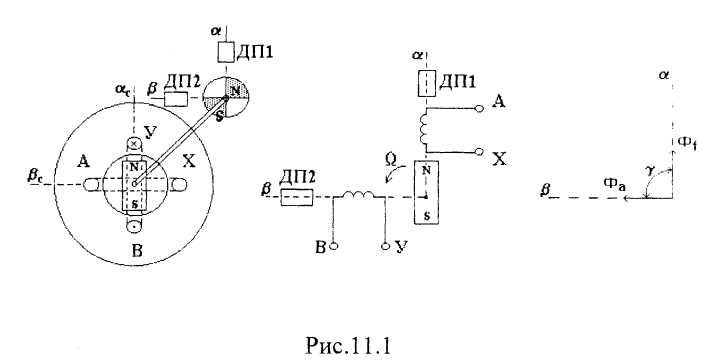
кривой вращающего момента на примере
двухфазного двухполюсного вентильного
электродвигателя. Соосно
с обмотками статора имеем два чувствительных
элемента (ЧЭ) датчика
положения. Пусть в исходном состоянии
ось полюсов ротора
совпадает с осью фазы А (в системе
координатных осей
![]()
![]() ,
рис.11.1.
,
рис.11.1.
Сигнальный
элемент (СЭ) датчика положения ротора
(ДПР),
перекрывающий зону
![]() ,
входит в область чувствительного
элемента ДП1 и вырабатывает сигнал на
включение фазы В на постоянное
напряжение источника питания. Число
сигнальных секторов
равно числу пар полюсов ротора. В общем
случае ширина зоны действия сигнального
элемента
,
входит в область чувствительного
элемента ДП1 и вырабатывает сигнал на
включение фазы В на постоянное
напряжение источника питания. Число
сигнальных секторов
равно числу пар полюсов ротора. В общем
случае ширина зоны действия сигнального
элемента
![]()
где
![]() - число пар полюсов,
- число пар полюсов,
![]() - число фаз (секции) обмотки статора.
Пусть
по фазе В протекает ток в положительном
направлении и
создает магнитный поток Фа
Взаимодействие потоков статора и ротора
- число фаз (секции) обмотки статора.
Пусть
по фазе В протекает ток в положительном
направлении и
создает магнитный поток Фа
Взаимодействие потоков статора и ротора
![]() создает вращающий момент
создает вращающий момент

где
![]() - угол между векторами потоков ротора
и обмотки статора, k,
k
-конструктивные коэффициенты, Iа
-
ток фаз обмотки статора.
- угол между векторами потоков ротора
и обмотки статора, k,
k
-конструктивные коэффициенты, Iа
-
ток фаз обмотки статора.
О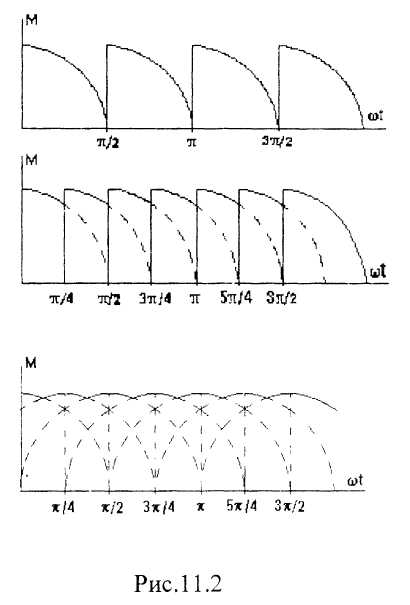 чевидно,-
что при повороте ротора на угол
момент , создаваемый фазой В, уменьшается
до нуля. В это время сигнальный элемент
датчика положения ротора входит в
область чувствительного элемента ДП2
и вырабатывает сигнал на включение
фазы А. Момент вращения максимален.
Осуществляется поворот ротора еще на
.
Если в качестве
чувствительного элемента взяты
датчики Холла, а в качестве сигнальных
элементов - постоянные магниты, то
при повороте ротора на угол тс под ДП1
меняется полярность магнита, а ЭДС
датчика Холла меняет знак. ДП1
вырабатывает сигнал на включение фазы
В, но с другой полярностью прикладываемого
напряжения. Направление момента вращения
сохраняется и ротор поворачивается на
очередной угол
.
Кривая момента вращения представлена
на рис. 11.2,а.
чевидно,-
что при повороте ротора на угол
момент , создаваемый фазой В, уменьшается
до нуля. В это время сигнальный элемент
датчика положения ротора входит в
область чувствительного элемента ДП2
и вырабатывает сигнал на включение
фазы А. Момент вращения максимален.
Осуществляется поворот ротора еще на
.
Если в качестве
чувствительного элемента взяты
датчики Холла, а в качестве сигнальных
элементов - постоянные магниты, то
при повороте ротора на угол тс под ДП1
меняется полярность магнита, а ЭДС
датчика Холла меняет знак. ДП1
вырабатывает сигнал на включение фазы
В, но с другой полярностью прикладываемого
напряжения. Направление момента вращения
сохраняется и ротор поворачивается на
очередной угол
.
Кривая момента вращения представлена
на рис. 11.2,а.
Имеет место существенная пульсация вращающего момента в пределах оборота ротора, которая вызывает соответствующую пульсацию частоты вращения. Кроме того, при включении напряжения только на одну катушку при ряде положений ротора может оказаться, что момент вращения меньше момента сопротивления и двигатель вращаться не будет.
Пульсации момента вращения
можно существенно уменьшить, расширив
зону действия сигнального элемента до
![]() .
В этом случае через каждые
.
В этом случае через каждые
![]() одновременно
включены обе фазы на период
.
Кривая момента представлена на рис.11.2,6.
Таким образом обеспечивается достаточно
большой пусковой момент при любом
положении ротора. Учитывая синусоидальное
распределение кривой момента вращения
каждой катушки в зависимости от положения
ротора, кривую момента можно еще сгладить
путем сдвига чувствительных элементов
на угол
одновременно
включены обе фазы на период
.
Кривая момента представлена на рис.11.2,6.
Таким образом обеспечивается достаточно
большой пусковой момент при любом
положении ротора. Учитывая синусоидальное
распределение кривой момента вращения
каждой катушки в зависимости от положения
ротора, кривую момента можно еще сгладить
путем сдвига чувствительных элементов
на угол
![]() ,
рис.11.2, в. Проблема пульсаций момента
имеет значение только на малых скоростях,
особенно для безредукторных приводов.
,
рис.11.2, в. Проблема пульсаций момента
имеет значение только на малых скоростях,
особенно для безредукторных приводов.
Формирование кривых фазного напряжения трехфазного вентильного электродвигателя с трансформаторными датчиками взаимного положения ротора и фаз статора описано в /41/.
При пуске вентильного
электродвигателя (![]() )
по мере разгона ротора появляется и
возрастает ЭДС, наводимая в фазах
обмотки статора. Эта ЭДС противодействует
напряжению сети, приложенному к фазам
обмотки статора, и уменьшает ток фаз,
что приводит к снижению вращающего
момента. Когда вращающий момент
уравновесит момент сопротивления,
частота вращения ротора достигнет
установившегося значения. Изменения
момента сопротивления вызывают
соответствующие изменения частоты
вращения ротора, так же как это
происходит в двигателях постоянного
тока. Изменение частоты вращения
ротора приводит к соответствующим
изменениям частоты переключения
транзисторов коммутатора и соответственно
к такому же изменению частоты вращения
поля статора. Ротор и поле статора имеют
одинаковую синхронную частоту вращения.
Эта частота вращения зависит от значения
напряжения, подаваемого на фазы
обмотки статора и от значения статического
момента сопротивления.
)
по мере разгона ротора появляется и
возрастает ЭДС, наводимая в фазах
обмотки статора. Эта ЭДС противодействует
напряжению сети, приложенному к фазам
обмотки статора, и уменьшает ток фаз,
что приводит к снижению вращающего
момента. Когда вращающий момент
уравновесит момент сопротивления,
частота вращения ротора достигнет
установившегося значения. Изменения
момента сопротивления вызывают
соответствующие изменения частоты
вращения ротора, так же как это
происходит в двигателях постоянного
тока. Изменение частоты вращения
ротора приводит к соответствующим
изменениям частоты переключения
транзисторов коммутатора и соответственно
к такому же изменению частоты вращения
поля статора. Ротор и поле статора имеют
одинаковую синхронную частоту вращения.
Эта частота вращения зависит от значения
напряжения, подаваемого на фазы
обмотки статора и от значения статического
момента сопротивления.
В /50/ дается следующая зависимость для расчета момента вращения вентильного электродвигателя (все величины берутся в о.е.)
![]()
Где
![]() - относительное значение
питающего напряжения,
- относительное значение
питающего напряжения,
![]() -
относительное значение электромагнитной
постоянной времени,
- относительное
значение угловой частоты вращения
ротора,
- угол установки ДПР (обычно
-
относительное значение электромагнитной
постоянной времени,
- относительное
значение угловой частоты вращения
ротора,
- угол установки ДПР (обычно
![]() ).
).
Уравнение (11.2) наглядно показывает влияние индуктивности обмотки статора на форму механической характеристики. Характерным является увеличение нелинейности характеристики с возрастанием индуктивности обмотки. Если принять = 0, то получим в системе относительных величин уравнение аналогичное основному уравнению исполнительного двигателя постоянного тока (8.25):
![]()
Механические характеристики бесконтактного электродвигателя постоянного тока, рассчитанные по (11.2), представлены на рис.11.3. Как видно в двигательном режиме (1 и 3 - й квадранты) механические характеристики симметричны относительно начала координат и достаточно линейны, причем в тем большей степени, чем меньше . В тормозных режимах (2 и 4 - й квадранты) характеристики не линейны и при больших наблюдается неустойчивость.
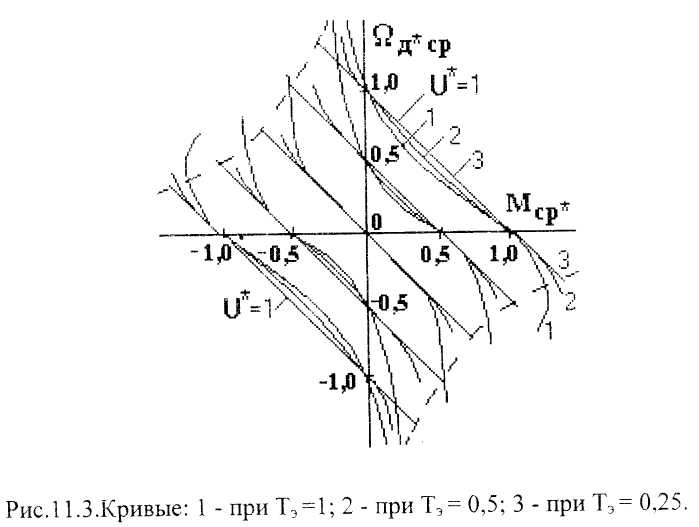
Штриховыми линиями на рис. 11.3 показана граница устойчивости при Тэ=1.
Вентильные электродвигатели
имеют большую перегрузочную способность
(![]() ),
что объясняется использованием
редкоземельных магнитов. Нелинейность
механических характеристик не
превышает 10%. В большинстве случаев
можно считать, что механические
характеристики бесконтактного вентильного
электродвигателя, работающего в
двигательном режиме, совпадают с
характеристиками двигателя постоянного
тока.
),
что объясняется использованием
редкоземельных магнитов. Нелинейность
механических характеристик не
превышает 10%. В большинстве случаев
можно считать, что механические
характеристики бесконтактного вентильного
электродвигателя, работающего в
двигательном режиме, совпадают с
характеристиками двигателя постоянного
тока.