

28.4. Динамические регуляторы
Наилучшими техническими характеристиками среди линейных регуляторов обладают ПИД-регуляторы. Однако и им присущи недостатки. При резком изменении параметров системы они зачастую теряют работоспособность. Они не обладают требуемым стабилизирующим эффектом, вследствие чего динамическая ошибка имеет незатухающий колебательный характер и заданная точность контурного управления не достигается. Это поставило задачу разработки более совершенных систем программного управления, свободных от недостатков локальных серво-регуляторов, Эти системы должны учитывать в явном виде (в структуре регулятора) динамику исполнительной системы. Отличительной чертой таких регуляторов является то, что при выборе структуры регулятора используются полные уравнения динамики. В результате структура регулятора оказывается вполне адекватной структуре динамической модели объекта управления. Схема электромеханической системы с динамическим регулятором представлена на рис. 28.19.
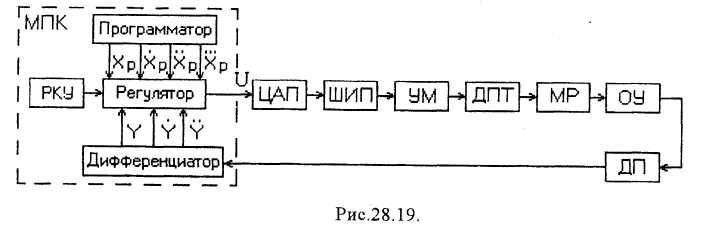
На рисунке: РКУ - блок расчета коэффициентов усиления, ШИП - широтно-импульсный преобразователь, УМ - усилитель мощности, ДПТ - двигатель постоянного тока, МР - механический редуктор, ОУ - объект управления, ДП - датчик положения.
Уравнение динамического регулятора имеет вид

где:
![]() ,
,
![]() - заданные матрица функция размерности
- заданные матрица функция размерности
![]() и вектор функция
размерности
и вектор функция
размерности
![]() ,
определяемые особенностями ЭМС,
,
определяемые особенностями ЭМС,
![]() - вектор параметров
ЭМС размерности
- вектор параметров
ЭМС размерности
![]() ;
;
![]() ,
,
![]()
![]() -
коэффициенты усиления, причем, из условия
устойчивости необходимо соблюдать
следующие неравенства
-
коэффициенты усиления, причем, из условия
устойчивости необходимо соблюдать
следующие неравенства
![]()
Выбирая параметры усилителей из условия (28.19) можно обеспечить не только асимптотическую устойчивость системы в целом и желаемое качество управления, но и любой желаемый запас устойчивости. Последнее важно с точки зрения придания динамическому регулятору свойства нечувствительности (инвариантности) по отношению к действию параметрических возмущений.
Микропроцессор
выполняет функции программатора,
вычисляя задающие сигналы; дифференциатора,
вычисляя по сигналу обратной связи
его первую и вторую производные; расчета
коэффициентов усиления
,
;
цифрового регулятора, вырабатывая
управляющий сигнал
![]() .
.
Динамические регуляторы особенно удобны для создания адаптивных регуляторов. В этом случае к системе управления (рис. 28.19) добавляются адаптатор и эстиматор, выполняемые программно. Это управление уменьшает влияние на процесс слежения переменности момента инерции.
Вентильные электроприводы
11 1. Вентильные электродвигатели систем автоматического регулирования
До начала 80-х годов основным приводом, использующимся в промышленных роботах и в станках с ЧПУ, был электропривод постоянного тока. Однако, электродвигатели постоянного тока имеют ряд недостатков, связанных с наличием коллекторно-щеточного узла. Среди них - малый срок службы, например, у двигателей серий ДПР и ДПМ он составляет порядка 3000 час. Решить проблему существенного повышения ресурса двигателей постоянного тока возможно только заменой щеточно-коллекторного узла полупроводниковым коммутатором, выполняющим его функции. Сейчас во всем мире наблюдается тенденция перехода на такие бесконтактные электродвигатели, получившие название вентильных двигателей (конструктивно аналогичных электродвигателям синхронного типа). Вентильные электродвигатели находят применение для промышленных роботов, для привода подач станков с ЧПУ. Вентильные электродвигатели типа ДБ120-8 используются в составе мотор-колес транспортных роботов, а ВД типа ДБ60-10-4 предназначен для привода навигационной системы автономного робота.
Первые вентильные электродвигатели выполнялись с большим числом секций замкнутой обмотки якоря, расположенной на статоре, и полупроводниковым коммутатором (коллектором) /88/. В последующем перешли к 2-м, 3-м, и многофазным (4-16 фаз) обмоткам, соединенным в звезду /35/. Ротор электродвигателя выполнен с постоянными магнитами. В настоящее время наиболее распространены бесконтактные моментные электроприводы с электродвигателями типа ДБМ, электроприводы типа ЭПБ-1, ЭПБ-2 с электродвигателями типа ДВУ, электроприводы типа ПРБ-1 и ПРБ-2 с электродвигателями типа ДСТ. Среди зарубежных фирм, выпускающих вентильные электродвигатели, следует отметить Siemens (Германия), Fanuc (Япония), Poletti (Италия),
Отличительной конструктивной особенностью вентильных электродвигателей является наличие датчика положения ротора на валу машины, по сигналам которого происходит переключение фаз обмотки якоря с помощью полупроводникового преобразователя типа инвертора. Датчик положения служит для определения относительного положения осей полюса (магнита) ротора и статорных обмоток электродвигателя.
При замене механического коммутатора (коллектора со щетками) полупроводниковым коммутатором электродвигатель становится более надежным и долговечным, создает меньше радиопомех, в то время как у двигателя постоянного тока щетки быстро изнашиваются и имеет место значительное искрение и радиопомехи.
Датчик положения ротора может быть выполнен трансформаторного типа
/32, 46,79/, на базе датчиков Холла /35,82/, магниторезисторов и управляемых дросселей насыщения /35/, фотоэлектрического типа /82, 102/, могут быть использованы индукционные машины: микро-сины, индуктосины, редуктосины, вращающиеся трансформаторы /102/.
Вентильные электродвигатели являются одними из самых перспективных для приводов роботов. Имея характеристики, аналогичные характеристикам двигателей постоянного тока, вентильные двигатели являются бесконтактными. Существуют следующие схемы соединения многокатушечных обмоток статора вентильных электродвигателей:
- замкнутые с параллельным подключением катушек к источнику питания по типу обмоток машин постоянного тока:
- с последовательным подключением катушек к источнику;
- с лучевым соединением катушек.
Сравнительный анализ вентильных двигателей с различными схемами соединения
обмоток показывает:
- наибольший КПД, наименьшую массу, наилучшее использование активных
материалов, наименьшие пульсации момента вращения и соответственно угловой
частоты вращения обеспечивают замкнутые обмотки;
- наиболее просты по устройству коммутаторы в двигателях с лучевым соединением
фаз. При этом, пропорционально числу фаз увеличивается число чувствительных
элементов датчика положения и число транзисторов в коммутаторе. На практике
наиболее распространены двигатели с тремя катушками (фазами).
Некоторые сведения о бесконтактных вентильных электродвигателях представлены в табл. 15.3. Единой теории вентильных электродвигателей нет. Так, анализ вентильных двигателей малой мощности проводится с использованием методов исследования коллекторных машин постоянного тока (работы И.Е.Овчинникова, Н.И.Лебедева, И.А.Вевюрко, Ш.И.Лутидзе) /48/. В работах Л.А.Афанасьева, А.К.Аракеляна, А.Л.Дубенского вентильные двигатели рассматриваются с позиций синхронных машин с использованием уравнений Парка - Горева /49/. В /88/ разработаны теоретические основы обобщенного вентильного двигателя. На основе уравнений обобщенного ВД можно получить математическое описание любого из известных типов ВД.