

23.5. Нелинейные и псевдолинейные корректирующие устройства
Нелинейные корректирующие устройства (НКУ) широко используются в системах автоматического управления. Простейшим нелинейным цифровым корректирующим звеном является звено типа "насыщение", используемое для ограничения одной из координат системы. Нелинейные корректирующие устройства могут быть последовательными или параллельными, а также могут быть установлены в цепях обратной связи. Правильный выбор типа и параметров нелинейных
корректирующих устройств позволяет синтезировать оптимальные законы управления, обеспечивающие высокую точность и качество работы системы, улучшать переходные процессы и придавать системе инвариантные свойства. Нелинейные корректирующие устройства позволяют в нестационарных системах (системах с изменяющимися со временем коэффициентами) получать практически постоянные запасы устойчивости и показатели качества вне зависимости от изменения параметров объекта. Нелинейные звенья, имеющие характеристику, обратную регулировочной характеристике тиристорного преобразователя в зоне прерывистых токов, обеспечивают постоянство общего коэффициента передачи в режимах непрерывного и прерывистого токов.
Реализация корректирующих устройств осуществляется на аналоговых нелинейных элементах или в виде управляющих программ (цифровые корректирующие устройства). В первом случае нелинейные корректирующие устройства подразделяются на три группы:
нелинейные четырехполюсники, включаемые в прямой канал или в обратные связи;
нелинейные управляющие устройства, позволяющие реализовать нелинейные законы управления;
нелинейные устройства, использующие элементы неизменяемой части системы.
Псевдолинейными корректирующими устройствами (ПЛКУ).
Кусочно-линейные корректирующие устройства (КЛКУ) позволяет значительно улучшить качество переходных процессов в системе.
В отличие от линейных корректирующих устройств нелинейные и псевдолинейные корректирующие устройства позволяют формировать амплитудные и фазовые частотные характеристики практически независимо друг от друга, так как большинство из них имеет два независимых канала - амплитудный и фазовый. НКУ и ПЛКУ позволяют реализовать оптимальные и квазиоптимальные законы управления, компенсировать вредное влияние некоторых сопутствующих нелинейностей. В качестве примера рассмотрим структурную схему релейной следящей системы с НКУ, рис. 23.10.
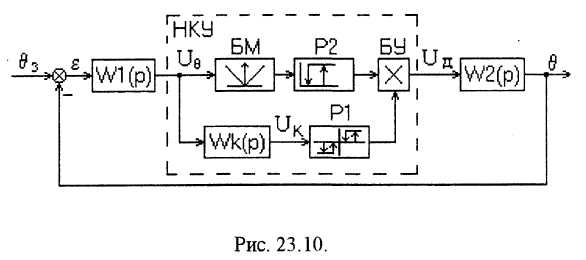
На рисунке:
БМ - блок выделения модуля; БУ - блок умножения; Р1, Р2 - реле;
WK(p) - передаточная функция фазоопережающего звена;
W1(p) - фильтр основного канала;
W2(p) - передаточная функция линейной части системы.
Амплитудный канал содержит фильтр и блок взятия модуля БМ. В фазовом канале включены фазоопережающие звенья и блок сигнатуры. Выходные координаты обоих каналов перемножаются в блоке умножения БУ.
Одним из важнейших вопросов проектирования релейных следящих систем является обеспечение режима устойчивого равновесия при известных параметрах линейной части и релейного элемента. В схеме (рис. 23.10) канал из блока выделения модуля БМ и реле Р2 формирует в основном амплитуду выходного напряжения блока умножения, а канал из фазоопережающего звена и реле Р1 формирует фазу выходного напряжения. Реле реверса Р1 управляет полярностью нереверсивного реле Р2 основного канала в блоке умножения. Функции БУ состоят в умножении сигнала основного канала на +1, 0 или -1 в зависимости от состояния реле Р1. Включение в канал реверса дифференцирующей цепочки привело к тому что реле Р1 срабатывает раньше, чем отпускает реле Р2, в результате чего обеспечивается срыв автоколебаний при заданных согласованных параметрах системы.
Форсирующие нелинейные корректирующие устройства. Одной из разновидностей нелинейных динамических корректирующих устройств являются НКУ форсирующего типа. Для динамических НКУ характерным является то, что их действие проявляется только во время протекания переходных процессов в системе. Структурная схема такого НКУ представлена на рис. 23.11.
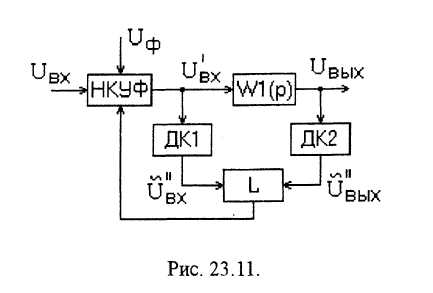
НКУФ - нелинейное корректирующее форсирующее устройство,
ДК1, ДК2 - дифференцирующие контуры,
L - логическое устройство,
W1 (p) - передаточная функция апериодического звена системы.
Сигналы U?bx и UBыx со входа и выхода одного из инерционных звеньев системы через дифференцирующие контуры, имеющие передаточные функции типа Wд(p) = (1 + Тдр)/Тд, подаются на логическое устройство. На выходе дифференцирующих контуров постоянная составляющая входных сигналов будет отсутствовать, а переменные составляющие сигналов будут иметь незначительный сдвиг в сторону опережения относительно входных сигналов. Логическое устройство анализирует знаки поступающих сигналов. В тех случаях, когда знаки сигналов не совпадают, логическое устройство формирует импульсный сигнал, который при помощи ключевой схемы НКУФ включает на вход инерционного звена дополнительный форсирующий сигнал Uф. Принцип работы НКУФ иллюстрируется на рис. 23.12.
Д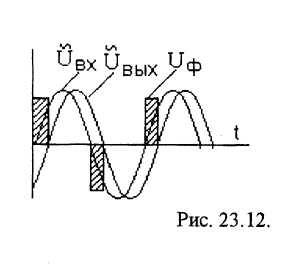 ействие
форсирующего сигнала
Uф
заключается в том, что он ускоряет
изменение выходного сигнала Uвых
в
тех интервалах, в которых он отстает
от входного сигнала. Основным
назначением форсирующих НКУ является
решение таких задач, когда необходимо
"подтолкнуть" систему, например,
при наличии в системе большого
момента сухого трения.
ействие
форсирующего сигнала
Uф
заключается в том, что он ускоряет
изменение выходного сигнала Uвых
в
тех интервалах, в которых он отстает
от входного сигнала. Основным
назначением форсирующих НКУ является
решение таких задач, когда необходимо
"подтолкнуть" систему, например,
при наличии в системе большого
момента сухого трения.
ЦИФРОВЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
Структурная схема цифровой системы управления
Рост степени интеграции в микропроцессорной технике и создание микроконтроллеров с встроенным набором специализированных периферийных устройств сделали необратимой тенденцию перехода систем управления электроприводами к прямому цифровому управлению. При этом имеет место непосредственное управление от микроконтроллера каждым ключом силового преобразователя и прямой ввод в микроконтроллер сигналов обратных связей (дискретных, аналоговых, импульсных) с их последующей программно-аппаратной обработкой контроллером.
Особенностью цифровых систем управления является наличие квантователя сигналов по уровню в цепях обратных связей, в цепях параллельной коррекции и в ряде случаев в устройстве задающего сигнала. Погрешность цифровых устройств не превышает величины единичного значения младшего разряда кода, с которым эти устройства оперируют. Кроме квантования по уровню цифровым системам присуще квантование по времени. Период (такт) временного квантования То для большинства систем лежит в пределах 0,001-0,01 с. Очевидно, что если поставлена задача обеспечения высокого качества управления, такт квантования следует выбирать как можно меньшим. При выборе такта квантования следует учитывать следующие факторы:
требуемое качество управления;
динамику объекта управления;
спектры возмущений;
тип электропривода;
измерительные устройства.
Как правило, требования оказываются противоречивыми и такт квантования выбирают из компромиссного решения.
Преимущество цифровых регуляторов заключается в реализации любой требуемой передаточной функции, возможности введения адаптации, нелинейной коррекции.
Обобщенная функциональная схема цифровой системы регулирования представлена на рис. 28.1.
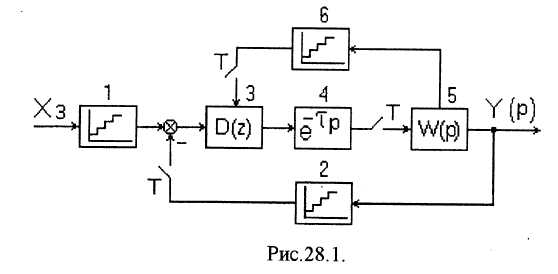
На рисунке: 1 - задающий квантователь; 2 - квантователь обратной связи; 3 - дискретная передаточная функция цифрового регулятора; 4 - звено с чистым запаздыванием, отражающее конечное время вычислений в регуляторе; 5 - непрерывная передаточная функция объекта управления; 6 - квантователь цепи параллельной коррекции.
Передаточная функция корректирующего дискретного регулятора в общем виде записывается следующим образом
![]()
Значения коэффициентов находят из выражения
![]()
где Wo (z) - дискретная передаточная функция объекта управления, полученная с помощью таблиц z - преобразования, Ф(z) - желаемая дискретная передаточная функция системы в замкнутом состоянии.
Функция Ф(z) должна быть реализуема. Для этого она должна представлять собой отношение двух полиномов относительно z-1 с действительными коэффициентами, причем свободный член в знаменателе должен быть отличным от нуля, а модуль степени полинома числителя должен быть больше, чем у знаменателя. При применении микропроцессоров стоимости цифровых и аналоговых систем управления практически не отличаются. Подробный анализ элементов цифровой системы управления представлен ниже.