

23.3. Цифровые корректирующие устройства
Цифровые корректирующие устройства реализуются в виде алгоритмов в программах на ЭВМ или в виде цифровых блоков, модели-рующргх законы коррекции. Следует отметить, что перед разработкой алгоритмов реализации цифровых корректирующих устройств необходимо проверить передаточную функцию регулятора на отсутствие нулей и полюсов, превышающих по модулю единицу. Ряд типовых, наиболее часто применяющихся цифровых корректирующих фильтров, представлено ниже.
Интегрирующее звено первого порядка
![]()
![]()
![]()
![]()
где
![]()
В общем виде передаточная функция цифрового корректирующего устройства имеет вид
![]()
Соответствующая структурная схема цифрового корректирующего устройства представлена на рис. 23.3.
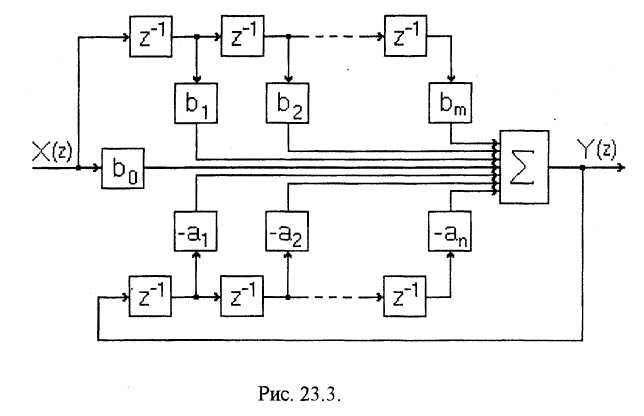
Используя выражение (23.7) можно составить цифровые фильтры П, ПИ, ПД и ПИД-типа. С целью повышения помехозащищенности алгоритмов, использующих операцию дифференцирования, вводят ограничение на функцию дифференцирования за счет добавления апериодического звена, используют алгоритмы сглаживания и усреднения сигнала ошибки или первой его разности. Эффективным средством повышения помехоустойчивости является исключение сигнала ошибки из дифференцирующей части и применение вместо него сигнала обратной связи. Соответствующая структурная схема системы представлена на рис. 23.4.
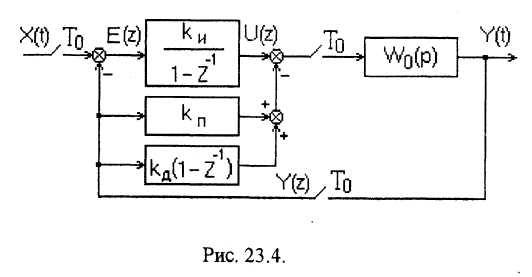
На рисунке:
Wo(p) - передаточная функция системы, охваченная данной обратной связью.
Алгоритм регулятора имеет вид
![]()
где kп, kи, kд - коэффициенты передачи пропорциональной, интегральной и дифференциальной составляющих сигнала ошибки регулирования.
Ряд передаточных функций и временных характеристик особых (интерполирующих) линейных цифровых корректирующих устройств представлен в [40].
23.4. Параллельные корректирующие устройства
Возможность коррекции систем автоматического регулирования с помощью параллельных корректирующих устройств, с приведением структурных схем и построением логарифмических частотных характеристик, хорошо обоснована в [120, 132]. Показано, что с помощью параллельных корректирующих устройств можно повысить показатели качества системы в той же степени, как с последовательными корректирующими устройствами.
Параллельные корректирующие устройства используются для введения в закон управления интегралов и производных. Для повышения порядка астатизма служат изодромные устройства, представляющие собой интегрирующее звено, включенное параллельно основному каналу управления, рис. 23.5.
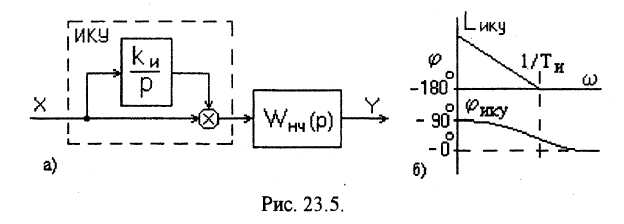
На рисунке: ИКУ - изодромное корректирующее устройство; WHЧ(p) - передаточная функция неизменяемой части системы.
Передаточная функция изодромного устройства имеет вид
![]()
где Ти = 1/kи - постоянная времени изодромного устройства.
Логарифмические
частотные характеристики (рис. 23.5, б)
показывают,
что воздействие на амплитуду и фазу
сигнала наблюдается только в области
низких частот до
![]() .
Это
позволяет, при соответствующем выборе
значения
.
Это
позволяет, при соответствующем выборе
значения
![]() , повысить порядок астатизма системы
без изменения характера
ЛАЧФ
и
ЛЧФХ в среднечастотной области (зоне
, повысить порядок астатизма системы
без изменения характера
ЛАЧФ
и
ЛЧФХ в среднечастотной области (зоне
![]() ).
Для введения в закон управления
нескольких интегралов возможно
последовательное включение нескольких
изодромных звеньев.
).
Для введения в закон управления
нескольких интегралов возможно
последовательное включение нескольких
изодромных звеньев.
Структурная схема введения в канал управления производной входного сигнала представлена на рис. 23.6.
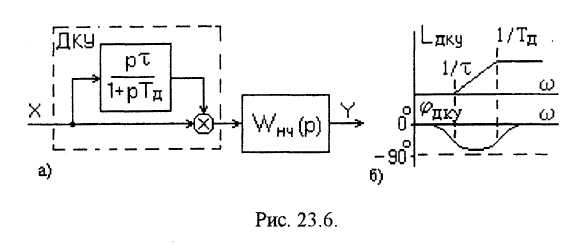
На рисунке:
ДКУ - дифференцирующее корректирующее устройство;
Tд- постоянная времени дифференцирующего звена;
![]() - время задержки.
- время задержки.
На этом же рисунке приведены логарифмические частотные характеристики ДКУ
Параллельные корректирующие звенья в сочетании с последовательными корректирующими устройствами позволяют создавать системы комбинированного управления. Комбинированные системы управления позволяют оптимизировать замкнутый контур регулирования с учетом требований к устойчивости системы и качеству отработки внешних возмущений.
Гибкая обратная связь подает на вход охваченного ею звена (или нескольких звеньев) величину пропорциональную первой производной от выходной величины этого звена. В более общем случае, кроме первой производной, можно подать вторую и более высокие производные выходной величины.
Повышение порядка астатизма системы. Повышение порядка астатизма системы обеспечивает увеличение динамической точности отработки сигнала. Существующие многочисленные схемы являются модификациями двух основных методов.
Метод В.А. Боднера заключается в введении в основную цепь управления дополнительных интегрирующих звеньев, охваченных прямой параллельной жесткой связью, рис. 23.7.
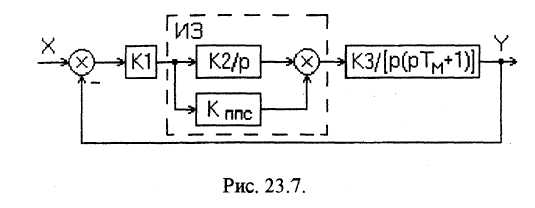
На рисунке:
ИЗ - дополнительное интегрирующее звено,
Кппс - передаточный коэффициент звена прямой параллельной жесткой связи.
Эквивалентная передаточная функция дополнительного интегрирующего звена
![]()
Где
![]() -
постоянная времени.
-
постоянная времени.
Из
(23.10) очевидно, что передаточная функция
дополнительного
звена дает эффект аналогичный включению
последовательного корректирующего
ПИ-регулятора. Постоянную времени
![]() можно
менять выбором
желаемого значения
можно
менять выбором
желаемого значения
![]() .
.
Метод
М.В. Меерова заключается в введении в
основную цепь операционного
усилителя К2 с очень большим коэффициентом
усиления,
охваченного корректирующей отрицательной
обратной связью с
![]() рис. 23.8
рис. 23.8
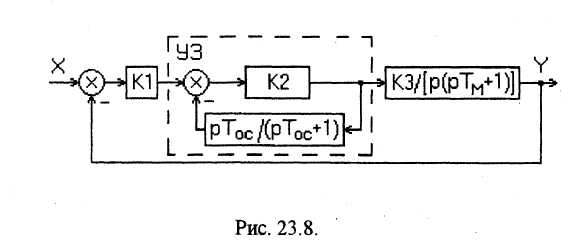
На рисунке:
УЗ - усилительное звено с корректирующей обратной связью.
На этом принципе построены ПИ-регуляторы.
Комбинированные системы коррекции. Системы, в которых одновременно с регулированием по отклонению регулируемой величины осуществляется регулирование по возмущению, называются системами комбинированного регулирования. Системы комбинированного регулирования позволяют синтезировать инвариантные системы, в которых параллельно естественному пути прохождения возмущающего воздействия на объект создано компенсирующее воздействие, оказывающее на регулируемый параметр такой же эффект по величине, как и возмущающее воздействие, но противоположное по знаку. Типичная схема комбинированной системы автоматического регулирования представлена на рис. 23.9.
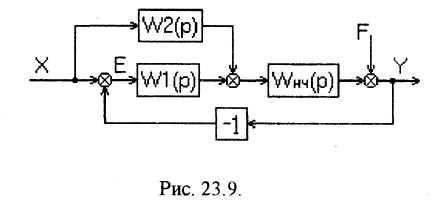
На рисунке:
Wl(p) - передаточная функция последовательного корректирующего устройства;
W2(p) - передаточная функция параллельного корректирующего устройства;
WНЧ(р) - передаточная функция неизменяемой части системы.
Передаточная функция представленной комбинированной системы имеет вид

Если передаточную функцию параллельного корректирующего устройства сделать обратной передаточной функции неизменяемой части объекта
![]()
то передаточная функция комбинированной системы становится равной W(p) = 1. То есть эта система превращается в идеальную следящую систему.
Передаточная функция комбинированной системы по сигналу ошибки
![]()
Очевидно, что при выполнении условия (23.13) ошибка управления при возникновении вредных внешних воздействий или отклонений параметров системы от первоначально заданных будет равна нулю. Во многих ЭМС объект управления содержит интегрирующие звенья. Тогда W2(p) в соответствии с (23.13) будет иметь дифференцирующие звенья, реализация которых весьма затруднительна. Часто прибегают к аппроксимациям, производя замену физически нереализуемой функции близкой к ней физически реализуемой передаточной функцией, что дает возможность создать квазиинвариантную систему, мало отличающуюся от инвариантной по точности управления. Например, заменяют оператор р на множитель (1 + рТ)/Т, причем постоянная времени Т - достаточно велика.
Использование комбинированного управления позволяет получить лучшие качественные показатели системы управления, а также снизить требования к основному каналу.