

Корректирующие устройства
По основному назначению корректирующие устройства классифицируются на стабилизирующие, компенсирующие, фильтрующие и специальные. Стабилизирующие устройства предназначены для улучшения динамических характеристик системы и обеспечения ее устойчивости. Компенсирующие устройства служат для уменьшения установившихся ошибок регулирования. Фильтрующие устройства вводятся с целью повышения помехозащищенности системы. К специальным корректирующим устройствам относятся нелинейные устройства коррекции, устройства самонастройки, логические устройства в системах с переменной структурой. По способу введения в систему управления корректирующие устройства подразделяют на последовательные и параллельные. По схемной реализации корректирующие устройства подразделяются на пассивные (RC-цепи) и активные, построенные на базе операционных усилителей. В цифровых системах управления, выполненных на базе ЭВМ, корректирующие устройства представляют собой математические алгоритмы.
Системы с последовательной коррекцией позволяют, даже при значительных погрешностях в определении динамических параметров объекта регулирования, получить удовлетворительное качество системы управления электроприводом. При этом они отличаются простыми способами синтеза и настройки регуляторов. Большим достоинством последовательной коррекции является удобство ограничения любого из регулируемых параметров на заданном уровне. В качестве корректирующих устройств применяют также отрицательные обратные связи. Они снижают влияние нелинейных характеристик тех участков цепи, которые охватываются обратными связями, и снимают чувствительность к изменению параметров этих звеньев.
23.1. Активные корректирующие устройства
Последовательные корректирующие устройства широко используются в усилительных устройствах следящих систем для придания цепям управления особых свойств. Корректирующие устройства подразделяют на активные, выполненные на операционных усилителях, и пассивные. Корректирующие устройства в цифровых системах управления выполняются программно. Как правило, коррекция следящих систем осуществляется комбинацией последовательных, параллельных корректирующих устройств и корректирующих обратных связей. Ряд схем активных корректирующих устройств представлен на рис. 23.1. Активные корректирующие устройства наряду с преобразованием сигнала выполняют функцию его усиления.
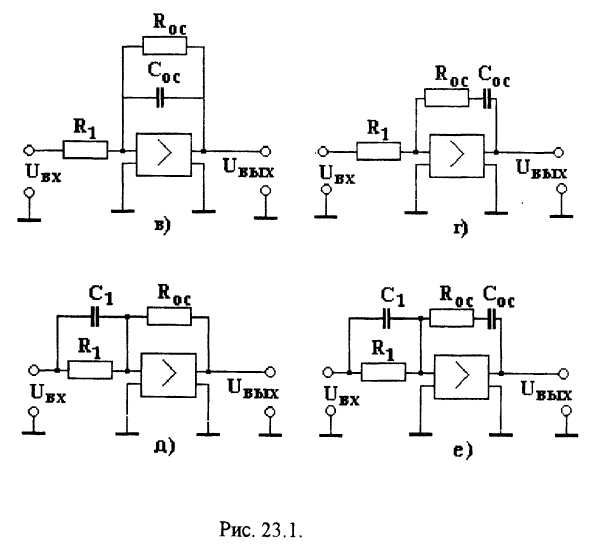
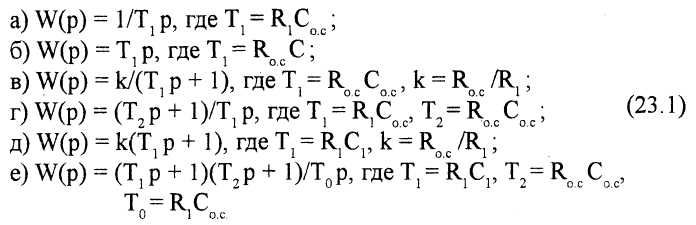
Передаточные функции приведенных корректирующих устройств имеют следующий вид:
Основные параметры операционных усилителей со значениями коэффициентов усиления приведены в приложении, табл. 30.29. Схемы операционных усилителей, их полные параметры и логарифмические частотные характеристики представлены в п. 22.3.
23.2. Пассивные корректирующие устройства
Пассивные корректирующие устройства выполняют в виде электрических контуров, построенных на базе линейных R,C элементов. Они не содержат источников энергии и преобразование сигнала сопровождается его частичным ослаблением. Как правило, они применяются в цепях постоянного тока. В системах переменного тока при применении корректирующих устройств необходимо использовать двойное преобразование сигнала: перед корректирующим устройством ставят демодулятор, а за корректирующим устройством модулятор и усилитель. Ряд схем пассивных корректирующих устройств приведен на рис. 23.2.
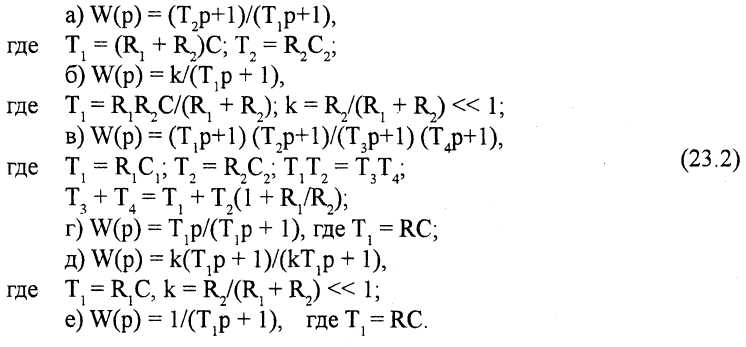
Передаточные функции приведенных пассивных корректирующих устройств имеют следующий вид:
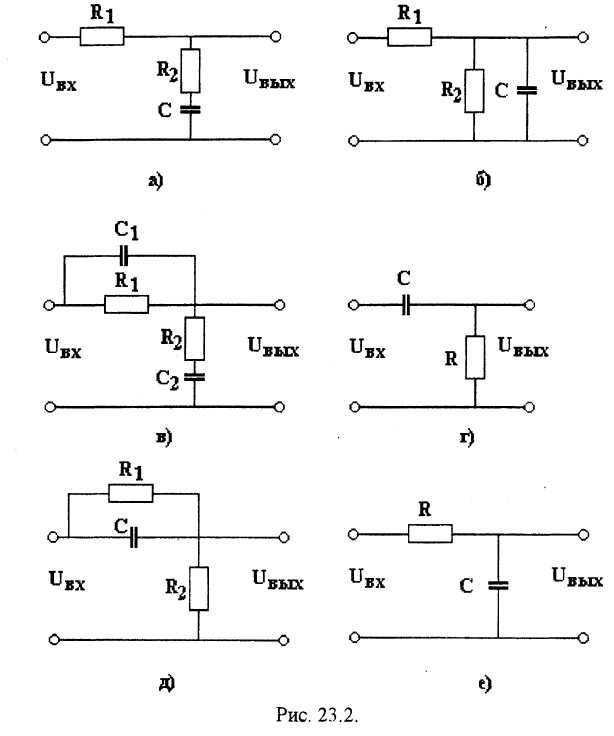
Назначение дифференцирующих контуров в уменьшении влияния инерционности объекта регулирования и элементов регулятора на качество регулирования. Дифференцирующие контуры являются фильтрами верхних частот. Интегрирующие контуры вводятся для повышения точности системы при медленно меняющихся воздействиях. Интегрирующие контуры фактически представляют собой фильтры низких частот.
Активные корректирующие устройства включают в главную цепь, и они являются последовательными корректирующими устройствами. Пассивные корректирующие устройства чаще всего включают в цепи обратных связей. Системы подчиненного регулирования с последовательной коррекцией при увеличении числа контуров имеют тенденцию к снижению быстродействия и повышению чувствительности к изменениям параметров. Рекомендуется применять параллельно-последовательную коррекцию. В этом случае системы оказываются менее чувствительны к нестабильности параметров и в ряде случаев позволяет увеличить их быстродействие. Корректирующие звенья с передаточной функцией дифференцирующего типа (рис. 23.2, г, д) придают обратной связи свойство гибкости.