

Автоматизированный электропривод
Электропривод как устройство (ГОСТ)
Электропривод – это электромеханическая система, предназначенная для приведения рабочих органов машин и управление их технологическим процессом, состоящая из четырех частей:
электродвигательного устройства;
преобразовательного устройства;
управляющего устройства;
передаточного устройства.
Электропривод как объект изучения
Электроприводом называется электромеханическая система, служащая для преобразования электрической энергии в механическую и состоящая из следующих частей:
электродвигатель;
преобразовательного устройства;
передаточного устройства.
Структура ЭП
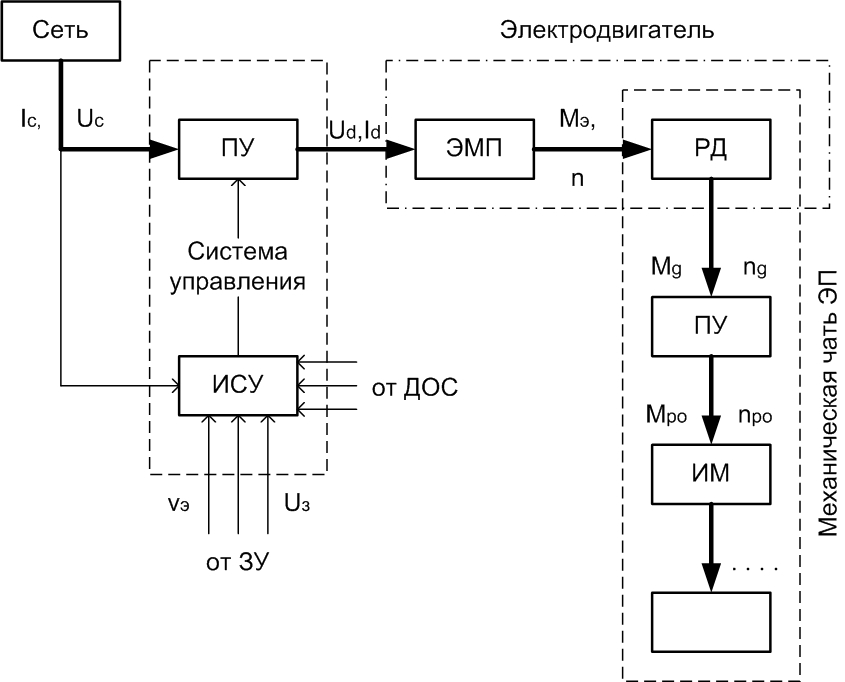
ПУ – преобразовательное устройство;
ЭМП – электромеханический преобразователь;
РД – ротор двигателя;
ПУ – передаточное устройство;
ИМ – исполнительный механизм;
ЗУ – задающее устройство;
ДОС – датчик обратной связи.
Составные части ЭП (с учетом классификации)
1. Электродвигатели делятся:
по мощности от нескольких долей ВТ до нескольких десятков тысяч кВт;
по роду потребляемого тока на двигатели переменного и постоянного тока.
Двигатели постоянного тока делятся:
двигатели независимого возбуждения;
двигатели параллельного возбуждения;
двигатели последовательного возбуждения;
двигатели смешанного возбуждения;
магнитоэлектрические машины;
двигатели с полым (немагнитным) ротором;
двигатели с полу проводниковыми коммутаторами;
магнитогидродинамические электродвигатели;
шаговые двигатели.
Двигатели переменного тока делятся:
синхронные двигатели (СД);
асинхронные двигатели (АД);
однофазные асинхронные двигатели;
электродвигатели двойного питания;
синхронно-реактивные двигатели (СРД);
синхронные гистерезисные двигатели;
редукторные двигатели;
универсальные коллекторные двигатели;
линейные двигатели.
2. Преобразовательные устройства:
Генераторы;
ЭМУ – электромашинные усилители;
МУ – магнитные усилители;
ТП – тиристорные или транзисторные преобразователи;
ПЧ – преобразователи частоты.
3. Устройства управления является самой ответственной частью ЭП, они определяют уровень автоматизации и зависят от уровня развития техники.
Устройство управления выполняют следующие функции:
Автоматизированный пуск, реверс, торможение и поддержание частоты вращения с невысокой точностью;
Поддержание частоты вращения с высокой точностью в статике и динамике.
Слежение за вводимыми в систему произвольно изменяющимися выходными сигналами;
Отработка заданной программы;
Выбор целесообразных режимов работы электропривода.
4. Передаточное устройство имеются у большинства видов электроприводов, они предназначены для согласования момента, частоты вращения, вида и характера движения вала электродвигателя и рабочего механизма.
Виды передаточного движения:
редукторы;
шкивы (ременная передача);
цепная передача;
кулисные механизмы;
фрикционные передачи;
электромагнитные муфты и т.д.
По структуре передачи энергии к рабочей машине или отдельным механизмам электропривода принято разделять:
групповой электропривод (водяные колеса, паровые машины);
одиночный электропривод;
многодвигательный электропривод (металлообрабатывающие станки, бумагоделательные машины).
Групповой электропривод – это электропривод, в котором от одного электродвигателя с помощью одной или нескольких трансмиссий движение предается группе рабочих машин.
Одиночный электропривод – это электропривод, который с помощью одного электродвигателя приводит в движение отдельную машину.
Многодвигательный электропривод – это электропривод, состоящие из нескольких одиночных приводов, каждый из которых предназначен для приведения в движение отдельных элементов механизма.