

Глава 18. Системы отсчета и передачи угла
18.1. Системы отсчета угла с амплитудными преобразователями
Широкое применение дискретных систем автоматического управления определяет большую потребность в цифровых преобразователях угла (ЦПУ). В настоящее время разработано значительное число различных типов ЦПУ, в том числе системы с амплитудными преобразователями. Одной из первых разновидностей амплитудных преобразователей были преобразователи, формирующие код угла через код тангенса этого угла /9,14,186, 198/. Функциональная схема такого устройства представлена на рис.18.1.
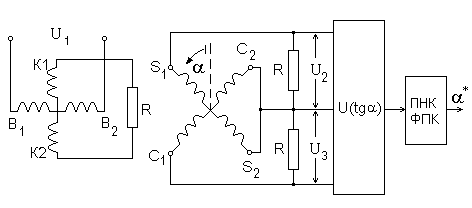
Рис.18.1
От СКВТ напряжения U2 , U3 подаются на формирователь напряжения, пропорционального тангенсу угла . Для однозначного определения угла в пределах 3600 используются напряжения синусной и косинусной обмоток. Угол поворота вала в пределах 3600 делится на восемь равных частей по 45. Для этого определяют фазу синусной обмотки (на интервале 180), сравнивают фазы напряжений синусной и косинусной обмоток (на интервале 90) и амплитуды напряжений синусной и косинусной обмоток (на интервале 45), затем определяют напряжение, пропорциональное отношению
Um sin / Um cos = tg. (18.1)
Это напряжение подают на преобразователь “напряжение - код” (ПНК), где определяется код tg. Затем в функциональном преобразователе (ФПК) по коду tg находится код угла . В пределах 45 зависимость = arctg приблизительно линейна.
Возможно нахождение кода угла с помощью формирователя кода tg и постоянного запоминающего устройства (ПЗУ). Формирователь кода тангенса имеет следующие характеристики: время преобразования 140 мкс, максимальная приведенная погрешность воспроизведения уровней квантования 0,1%. Код tg поступает на адресные входы ПЗУ, запрограммированного по закону арктангенса в диапазоне от нуля до 45. ПЗУ формирует на выходе код угла . Электронная схема описанного устройства приведена в /186, 198/. Недостатком преобразователей с промежуточным формированием tg является переменная дискретность, вызванная нелинейной зависимостью тангенса от угла .
От промежуточных операций вычисления tg можно уйти с помощью метода нахождения угла по апроксимирующим функциям. Наиболее простой апроксимирующей функцией (в пределах первого октанта) является зависимость
= sin/(cos + k sin), (18.2)
где k - расчетный коэффициент.
Погрешность апроксимации по этой формуле при k = 0,25 составляет 1,15. Физическая реализация функционального преобразователя по зависимости (18.2) представлена на рис.18.2.
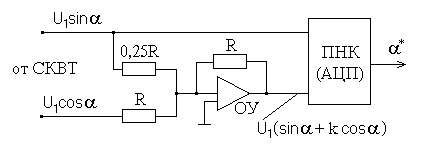
Рис.18.2
На рисунке: ОУ - операционный усилитель, ПНК - преобразователь “напряжение - код”.
Значительно меньшую погрешность, не превышающую 1’, дает следующая зависимость
= (sin -cos)/(0,732 + 0,268(sin + cos)), (18.3)
реализованная в функциональном преобразователе, рис.18.3.
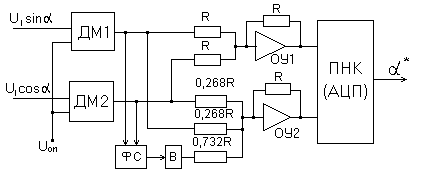
Рис.18.3
На рисунке: ДM1, ДM2 - демодуляторы, В- выпрямитель, ФС - формирователь сигнала, равного значению (sin2 + cos2) = 1 о.е., Uоп - опорное напряжение, равное напряжению возбуждения СКВТ.
Ряд структур построения функциональных преобразователей подобного типа и пути их совершенствования приведены в /186/. Снижение методической погрешности достигается усложнением схем амплитудных преобразователей.
Функциональные преобразователи угол - код могут быть выполнены также на базе сельсинов. Ряд схем таких преобразователей представлен в /186/.
18.2. Фазовращатели
На базе СКВТ можно построить цифровые датчики угла поворота вала в виде циклических преобразователей “угол- фаза-временной интервал- код”. Фазовращатель может быть выполнен с использованием СКВТ, работающего в однофазном или двухфазном режиме. Выходное напряжение фазовращателя, оставаясь неизменным по амплитуде, изменяется по фазе линейно в зависимости от угла поворота ротора. Цифровой преобразователь угла может быть выполнен 16-разрядным и иметь погрешность .
Однофазный фазовращатель. В однофазном фазовращателе временной сдвиг по фазе выходного напряжения в зависимости от угла поворота ротора достигается параметрическим способом, то есть с помощью фазосдвигающей цепочки RC . Принципиальная схема однофазного фазовращателя представлена на рис.18.4. Обычно выполняется первичное симметрирование.
Рис.18.4
Выходное напряжение фазовращателя
Uвых = Umax sin(t - 1 - ), (18.4)
где 1 - фазныйугол, зависящий от параметров выходной обмотки СКВТ и сопротивлений X c , R и R н ; - угол поворота ротора СКВТ.
Рекомендуется иметь
R = 1/C 2 r2; Rн > 2 R; r2 = x2, (18.5)
где r2 , x2 - омическое и индуктивное сопротивления вторичной обмотки СКВТ.
Если последнее равенство не выполняется, рекомендуют увеличить значения сопротивлений Xc и R /14/. Ряд схем преобразователей фаза- код представлено в /186/. Схема простейшего преобразователя содержит: СКВТ, два формирователя импульсов, триггер, высокочастотный генератор импульсов, управляемый выпрямитель, счетчик импульсов, преобразователь “ число импульсов- код”, рис.18.5.
Рис.18.5
На первый формирователь импульсов (ФИ-1) поступает опорное напряжение (напряжение питания обмотки возбуждения СКВТ), а на второй ФИ-2 поступает напряжение с выхода фазовращателя. В момент перехода напряжений с отрицательной полуволны на положительную формирователи импульсов ыдают синхронизирующие импульсы на триггер. Синхронизирующий импульс ФИ-1 активизирует триггер и он открывает управляемый выпрямитель (УВ). Импульсы высокочастотного генератора импульсов (ВЧГ) поступают на счетчик импульсов (Сч.И). Синхронизирующий импульс ФИ-2 подается на второй вход триггера и опрокидывает триггер. Вентили управляемого выпрямителя запираются, поступление импульсов с ВЧГ на счетчик импульсов прекращается. Так электронная схема преобразователя фиксирует разность фаз между опорным и выходным напряжениями и преобразует ее во временной интервал, пропорциональный углу поворота ротора, измеряемый с помощью заполнения импульсами от ВЧГ калиброванной частоты. Преобразователь “число импульсов - код” (ПЧИК) выдает код угла на регистр памяти (РП). Диаграммы напряжений представлены на рис. 18.6.
Рис.18.6
Число импульсов в пачке строго соответствует углу поворота ротора фазовращателя. Для двухполюсного фазовращателя, работающего в диапазоне 360, погрешность отсчета угла
= fв 360/ fвчг , (18.6)
где fв - частота напряжения возбуждения СКВТ, fвчг - частота высокочастотного генератора импульсов.
Двухполюсные СКВТ в режиме фазовращателя обеспечивают погрешность в пределах 15 - 45. Анализ погрешностей фазовращателя от неравенства активных и индуктивных сопротивлений вторичных обмоток, от неравенства сопротивлений взаимной индукции вторичных обмоток, от неперпендикулярности вторичных обмоток, от несинусоидальности напряжения источника питания и кривой выходного напряжения, от изменения частоты питающего напряжения, от наличия емкостной связи между вторичными обмотками, от изменения температуры окружающей среды приведен в /14/.
Для повышения точности отсчета угла преобразователь может быть выполнен двух-канальным. В этом случае точность отсчета угла определяется напряжением многополюсного СКВТ, формирующего напряжение канала точного отсчета
Uвых то = kтрUm1 sin(t- рп), (18.7)
где pп - число пар полюсов СКВТ канала точного отсчета.
Каждый из каналов работает в режиме фазовращателя. Погрешность двухканального преобразователя равна
то = го / рп. (18.8)
Ряд цифровых следящих электроприводов с двухканальными структурами отсчета угла на базе СКВТ описан в /206/. Как показали экспериментальные исследования инструментальная погрешность таких преобразователей на базе ВТ-100 (класса 0,3) не превышает 10, погрешность преобразователя типа МХИТАР-3 не превышает 5.
Двухфазный фазовращатель. Простейшая схема фазовращателя с вращающимся магнитным полем представлена на рис.18.7. На две фазы статора СКВТ подается переменное напряжение со сдвигом фаз на угол 2 . Обмотки статора, сдвинутые между собой на угол 2, создают вращающееся магнитное поле, которое наводит в выходной обмотке ЭДС, фаза которой смещена относительно фазы опорного напряжения на угол поворота ротора . Выходное напряжение
Uвых = kтр(Um1 sint sin + Um1 cost cos) = kтрUm1 sin(t- ), (18.9)
или Uвых = kтрUm1 ej . (18.10)
Рис.18.7
Принцип отсчета угла аналогичен изложенному выше для однофазного фазовращателя. Ряд функциональных схем отсчета угла представлен в /199/. Схемы двухфазных фазовращателей повышенной точности представлен в /186/.
Непрерывно повышающиеся требования к точности, исчисляемые долями угловых минут и даже несколькими угловыми секундами в широком диапазоне угла поворота, привели к появлению прецизионных измерительных систем с электрической редукцией. Например, двухканальные фазовращатели на базе СКВТ применяемые в качестве датчиков положения в промышленных роботах с повышенной точностью позиционирования, рис.18.8.
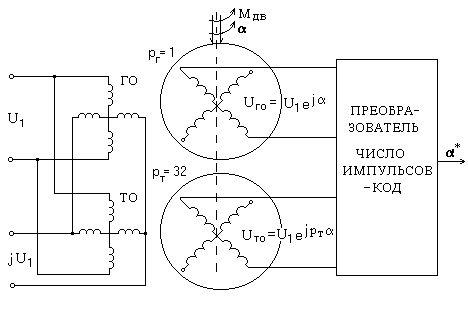 Рис.18.8
Рис.18.8
Принцип электрической редукции заключается в том, что при повороте вала выходное напряжение канала грубого отсчета изменяется на один период, а выходное напряжение канала точного отсчета на число периодов, равное отношению чисел пар полюсов pто/pго , которое называют передаточным отношением электрической редукции kэл.ред. Значение kэл.ред в зависимости от требований точности может изменяться от 8 до 256 и более /14/. Погрешность измерения такой информационно- измерительной системы равна
то = го/ kэл.ред. (18.11)
Работа многоканального фазовращателя описана в /56/. Для повышения точности отсчета угла рекомендуется в цепь косинусной выходной обмотки канала грубого отсчета ввести регулировочное сопротивление в виде параллельно включенных регулируемого резистора и конденсатора /16/. В качестве преобразователя в канале точного отсчета часто применяют индуктосины /31/.
18.3. Дистанционные одноканальные системы передачи угла
Системы, используемые для дистанционной передачи угла, называют синхронными передачами. Они состоят из датчика, приемника и линии связи между ними. По своим функциям синхронные передачи разделяются на индикаторные, имеющие на валу приемника только указатель (стрелка, лимб) и измерительные, предназначенные для измерения угла рассогласования между валами датчика и приемника, как правило, с последующей отработкой этого рассогласования. Типовые схемы систем передачи угла отличаются, главным образом, структурой измерительной части и способом образования сигнала рассогласования. Наиболее распространены одноканальные следящие системы, работающие в индикаторном и трансформаторном режимах, двухканальные следящие системы с механическим редуктором или с электрической редукцией. В этих следящих системах в качестве измерительных элементов могут применяться различные типы датчиков, представленных в гл.16.
С помощью СКВТ в настоящее время выполняются наиболее точные одноотсчетные системы трансформаторной синхронной передачи. Структурная схема такой системы дистанционной передачи угла представлена на рис.18.9.
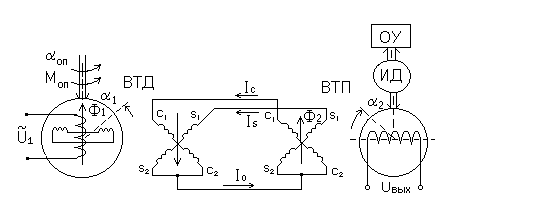
Рис.18.9
Обмотки статоров вращающегося трансформатора датчика (ВТД) и вращающегося трансформатора приемника (ВТП) образуют цепи синхронизации. Переменный ток возбуждения обмотки статора ВТД создает пульсирующий магнитный поток, который наводит ЭДС в обмотках ротора этогоСКВТ. Под действием этой ЭДС в цепях синхронизации протекают токи Is , Ic и Io = Is + Ic. Обмотка синхронизации ВТП создает пульсирующий магнитный поток, вектор которого вращается синхронно с поворотом ротора ВТД. Этот магнитный поток наводит в выходной обмотке ВТП ЭДС, которая через усилительное устройство подается на обмотку управления исполнительного электродвигателя. В качестве выходной обмотки ВТП, как правило, используется квадратурная обмотка СКВТ, которую часто называют обмоткой управления.
Предположим, что в исходном состоянии системы выходное напряжение ВТП равно нулю. При повороте ротора ВТД на угол 1 относительно исходного положения поток синхронизирующей обмотки ВТП также поворачивается на угол 1 и в обмотке управления ВТП наводится ЭДС, пропорциональная sin. Усиленное выходное напряжение, подаваемое на обмотку управления исполнительного электродвигателя, приводит ЭМС в движение. Электродвигатель вращает объект управления и одновременно ротор ВТП. При отработке угла 2 = 1 ЭДС выходной обмотки управления ВТП снижается до нуля.
При разработке современных автоматических устройств необходимы системы передачи угла, обладающие высокой точностью (погрешность ' ) при повороте входной оси на углы до 360. Погрешность систем передачи угла представляет собой разность между угловыми положениями роторов датчика и приемника после отработки двигателем системы заданного угла. Эта погрешность складывается из погрешностей измерительных элементов датчика и приемника системы, погрешности застоя и погрешности от дрейфа нулевого положения датчика и приемника, погрешности усилительно-преобразовательного блока, погрешностей шестерен в системах отсчета, погрешностей от установки или сочленения с валом двигателя или осью прибора. Часто перечисленные выше погрешности либо оказываются соизмеримыми, либо составляют значительный процент от погрешности измерительных элементов. Так, например, погрешность застоя находится в пределах 0,1- 0, 3. При уменьшении зоны застоя за счет увеличения коэффициента усиления требуется применять более сложные корректирующие цепи. Погрешность дрейфа нуля находится в пределах 0,1- 0,4. В некоторых случаях важным требованием является маломоментность датчика. Отсутствие щеточного контакта снижает момент сопротивления датчика, что уменьшает ошибку застоя. Погрешности СКВТ, работающих в системах передачи угла, от различных факторов достаточно полно проанализированы в /5/.
Системы с СКВТ имеют большую точность по сравнению с сельсинами. Погрешность передачи угла сельсинами находится в пределах (10 - 30), при использовании СКВТ (2 - 5). Сельсины применяют, как правило, для трехфазных систем. В качестве датчика положения в системах передачи угла могут быть использованы индуктосины.
Существующие одноканальные синхронно-следящие системы часто не удовлетворяют требованиям точности высокого порядка. Даже при специальной технологии изготовления чувствительных элементов точность синхронной передачи определяется погрешностью 10.
18.4. Двухканальные системы передачи угла
Двухканальная система дистанционной передачи угла на СКВТ. Для снижения инструментальной погрешности применяют двухканальные системы передачи угла. Двухканальная система передачи угла имеет два ВТД и два ВТП. Обмотки синхронизации расположены на статорах СКВТ. Ротор ВТД грубого отсчета (ВТДГО) приводится во вращение оператором: Моп , оп. Ротор ВТД точного отсчета (ВТДТО) связан с ротором ВТДГО мультипликатором, ускоряющим частоту вращения, с передаточным числом iто. Угол рассогласования точного отсчета то го iто . Аналогично связаны ротора ВТПТО и ВТПГО. Принципиальная схема системы представлена на рис.18.10.

Рис. 18.10
В системах передачи угла сигналы рассогласования ГО и ТО поступают на вход усилительного устройства через селектор, который обеспечивает автоматическое переключение системы с одного канала на другой /14/. Усилитель работает таким образом, что при малом угле рассогласования для управления
двигателем используется выходное напряжение канала точного отсчета, а при больших значениях угла происходит автоматическое переключение на управление двигателем с помощью выходного напряжения канала грубого отсчета. Исполнительный двигатель через редуктор поворачивает объект управления и роторы ВТПГО и ВТПТО на заданный угол. Следящая система приводится в согласованное положение с погрешностью канала точного отсчета. Канал ТО подключается к усилителю после работы канала ГО, так как он имеет iто положений устойчивого равновесия, в связи с тем, что период изменения амплитуды ЭДС ВТПТО в iто раз меньше по сравнению с ЭДС ВТПГО, рис.18.11.
Рис.18.11
При использовании в каналах грубого и точного отсчетов одинаковых СКВТ амплитуды выходных напряжений будут одинаковы, однако крутизна выходного напряжения канала точного отсчета в iто раз выше, чем канала грубого отсчета. Соответственно в iто раз снижается погрешность дистанционной передачи угла. Рекомендуют выбирать iто нечетным, так как при четном iто точка устойчивого равновесия канала ТО совпадает с точкой неустойчивого равновесия канала ГО и возникает “ложный нуль” и потеря самосинхронизации. Для ликвидации “ложного нуля” приходится вводить опорное напряжение (напряжение сдвига), смещающего напряжение ГО по оси абсцис.
Погрешность двухканальной системы передачи угла в iто раз меньше погрешности одноканальной системы. Однако появляются дополнительные погрешности: ред - угловая ошибка в зацеплении редуктора (порядка 2-4’) и ошибка за счет люфта (порядка 1’) . Таким образом
то =го / iред + ред. (18.12)
Увеличение передаточного отношения редуктора дает существенное снижение погрешности передачи угла только до тех пор, пока погрешность то не становится соизмерима с ред . Кроме того, увеличивается момент сопротивления повороту входной оси системы, что затрудняет передачу угла от маломощных устройств. Поэтому в двухканальных системах передаточное отношение редукторов обычно не превышает 33 / 10 /. Эти ошибки отсутствуют в системах с электрической редукцией.
Одним из основных элементов двухканальной системы передачи угла является синхронизирующее устройство, обеспечивающее надежное переключение каналов.
Синхронизирующее устройство (селектор). Наибольшее распространение получили схемы с суммированием выходных напряжений каналов грубого и точного отсчетов. На рис.18.12 представлена схема селектора с полупроводниковыми диодами с суммированием напряжений каналов грубого и точного отсчетов /14/.
Рис. 18.12
При большом угле рассогласования напряжение канала грубого отсчета велико, диоды Д2 открыты, падение напряжения на сопротивлении R3 значительно. При открытых диодах Д1 большая часть падения напряжения канала точного отсчета приходится на сопротивление R1. Выходное напряжение селектора равно сумме падения напряжений на сопротивлениях R2 - R3 .
При малых углах рассогласования на входе синхронизирующего устройства напряжение канала точного отсчета значительно больше напряжения канала грубого отсчета. Сопротивление R2 выбирается большим, чем сопротивление R1. При малом напряжении диоды Д1 имеют очень большое сопротивление, поэтому большая часть напряжения канала точного отстета падает на сопротивлении R2, а выходное напряжение канала грубого отсчета падает на диодах Д2, так как R3 мало (R3 Rд). На выходе селектора преобладает напряжение канала точного отсчета. Для надежной работы селектора рекомендуется соблюдать условие
Uго / Uто.max 1,5 - 2, которое выполняется подбором сопротивлений R1, R2 и Д1 /14/.
Двухканальная система передачи угла с электрической редукцией. В двухканальной системе передачи угла с электрической редукцией ВТДГО имеет число полюсов равное 2, а ВТДТО выполнен многополюсным. Передаточное отношение iто = рто /рго . Оба ВТД находятся на одной оси. В двухканальных системах с электрической редукцией наряду с раздельно выполненными двухполюсными и многополюсными СКВТ используются совмещенные конструкции. В совмещенной конструкции использован один магнитопровод для двухполюсной и многополюсной пар обмоток. Двухполюсная и многоплюсная обмотки уложены в одни и те же пазы магнитопровода статора и ротора. Аналогично выполнены приемники ВТПГО и ВТПТО. Погрешность передачи угла
то = го / iто = го / pто. (18.13)
Благодаря отсутствию механического редуктора резко уменьшается момент сопротивления повороту входной оси, что создает возможность передачи углового перемещения от маломощных устройств. Некоторые данные двухканальных СКВТ представлены в табл.30.3.
В двухканальных системах с электрической редукцией передаточное отношение равно 32; 64. Вращающиеся трансформаторы с большим числом полюсов имеют весьма большие размеры, поэтому наиболее перспективным является применение для канала ТО индуктосинов или двухфазных редуктосинов с числом зубцов ротора 64, 128, 256.
Принципиальная схема следящей системы, состоящей из индуктосина канала точного отсчета в паре с двухполюсным сельсином представлена на рис.18.13 /5/. Каналал грубого отсчета представлен на рисунке схематично. Поворотные индуктосины имеют равное число пар полюсов.
Рис.18.13
Применяют двухканальные системы передачи угла, в которых в канале ГО использованы двухполюсные СКВТ, а в канале ТО использованы индуктосины /31/. Минимальная погрешность такой системы ± 1 - 5”. В паре с двухполюсными СКВТ применяют также редуктосины. Минимальная погрешность такой системы ± 10 - 30” /8/.