

Figure 6: Priority Arbitration Example
Priority arbitration time is divided into fixed sized slots. The duration of each slot duration is typically made equal to end-to-end propagation delay of the medium. If the slot size is made any smaller than this, then the priority arbitration scheme would not work since a collision even when it occurs would not be detected. A slot size larger than this would lead to an increase in channel idle time during every slot. Over these slots, every node transmits the priority value of its highest priority pending message with msb first as shown in Fig. 5. Since simultaneous transmission follows or logic, a node that transmits a 0 and receives a 1, knows that there is at least one node that is having a higher priority pending message, and drops out of the contention.
To illustrate the working of this protocol, transmission of bits by different nodes in a hypothetical example during the arbitration interval has schematically been shown in the Fig. 6. In Fig. 6, three nodes N1, N2, and N3 are participating in the arbitration process. The priorities of highest messages at the nodes N1, N2, and N3 are 10, 16, and 20. As shown, node N1 drops out after transmitting the first bit as it transmits a 0 but listens a 1. Similarly, the node N2 would drop out after transmitting the third bit when it would transmit a 0 and listen to a 1. Finally, after transmitting the last bit, node N3 would conclude that it has the highest priority message and would begin its transmission.
Arbitration
Transmission
Figure
7: Priority Arbitration in Virtual Time Protocol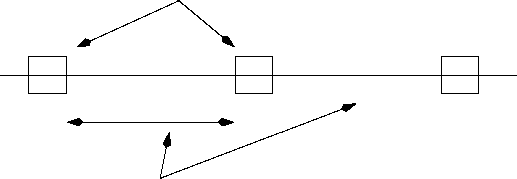
Virtual Time Protocol: In this protocol a node uses the state of the channel to reason about the pending packets residing at other nodes. Each node with a packet to send waits for an interval of time that is inversely proportional to the priority of highest priority message it has. That is the lower is the priority of a message that a node has, the more time it waits. At the expiration of the waiting time, the node senses the status of the channel. If the channel is busy, then this means that a higher priority message is being transmitted and it needs to wait until an idle period. So, if it finds that transmission is already taking place, then it waits for the next, frame, otherwise it starts to transmit.
N2
<- Propagation
Time >-![]()
N1
Figure 8: Problem in Virtual Time Protocol
What should be the difference in wait times of two nodes which have messages whose priorities differ by one? Because of the propagation delay in the network, a node can not instantaneously detect when another node starts transmission during arbitration. As a result, unless the wait time is at least as large as the propagation time, the following problem would occur. Assume that two nodes N1 and N2 have their priorities differ by one. After N1 starts transmitting, if N2 waits for any time lower than the propagation time, then it can not detect the transmission of N1 and would start transmitting. This would lead to collision and incorrect priority arbitration. This bounds the difference between the wait times of two nodes that have consecutive priorities.
5.2 IEEE 802.5:
IEEE 802.5 is a priority based token ring protocol. The header of a token contains two fields: a priority field and a mode field. In this protocol, token alternates between two modes: a reservation mode, and a free mode.
Packet
>
Payload
Header
Mode
bit