

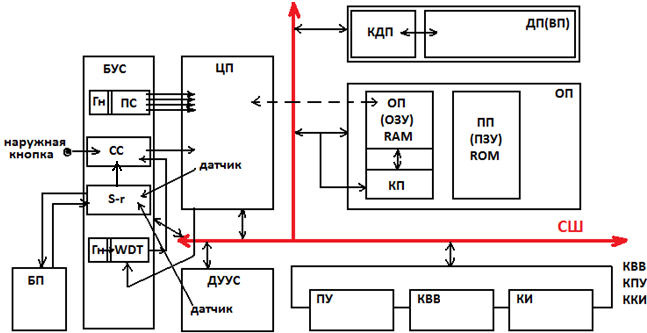
ЦП – центральный процессор – центральный блок ЭВМ реализующий обработку данных
ПУ – периферийные устройства
КВВ – контроллер ввода-вывода
КИ – коммуникационные интерфейсы
БУС – блок управления системой (ПС – подсистема синхронизации, Гн – генератор, подключённый к ПС, СС – система сброса, Supervisor, WDT)
ДУУС – дополнительные устройства управления системой
ДП – долговременная память
СШ – системная шина
ОП – основная память (ОП – оперативная память, ПП – постоянная память)
БП – блок питания
И всевозможные контроллеры
1.1 Перечислите основные (ключевые) подсистемы эвм
Любая ЭВМ содержит следующие основные подсистемы: обрабатывающую подсистему (операционные устройства и устройства управления); подсистему памяти; подсистему ввода-вывода; подсистему управления и обслуживания.
(из лекции попова) Подсистемы ЭВМ:
Память: Кэш, Виртуальная память
Системная шина
Подсистема прерываний
Система ввода-вывода
1.2 В чем состоит принцип магистрально-модульной организации эвм?
Структура большинства современных микропроцессорных систем является
магистрально-модульной : различные функционально-завершенные блоки
(микропроцессор, блоки памяти различного типа, контроллеры периферийных устройств
и коммуникационные и т.п.) подключены к общим магистралям (шинам), посредством
которых взаимодействуют между собой, образуя единую вычислительную систему.
Передача информации и синхронизирующих сигналов между различными группами
функциональных блоков выполняется в режиме разделения времени, то есть поочередно.
Магистраль (или шина) – совокупность сигналов, соединяющих несколько
функциональных блоков ЭВМ. Это понятие охватывает как электрические линии
(собственно «шина»), так и протоколы взаимодействия блоков по ним. Т.е. под понятием
«шина» понимается более широкое понятие «шинный интерфейс».
1.3 Что такое вычислительное ядро эвм, какие компоненты его составляют.
Ядро ПЭВМ образуют процессор и основная память (ОП), состоящая из оперативной памяти и постоянного запоминающего устройства (ПЗУ). ПЗУ предназначается для записи и постоянного хранения наиболее часто используемых программ управления.
• ядро ЭВМ образует процессор - единственный вычислитель в структуре, дополненный каналами обмена информацией и памятью
1.4 Укажите назначение и приведите блок-схему подключения системного супервизора.
Системный супервизор – электронная схема, которая с помощью специальных встроенных компьютерных датчиков, контролируют наличие напряжения на линиях электропитания, наличие перегрева, стабильность частоты синхросигнала, контролирует возникновение ошибок при передаче данных по шинам, контролирует наличие внешнего напряжения электропитания и другие параметры системы.
При возникновении внештатных ситуаций супервизор может рестартовать систему, отключить систему или выдать (записать в журнал) сообщение.
Этот аппаратный блок не зависит от ЦП и работает, если система «ляжет».
1.5 Укажите назначение, опишите принцип работы и приведите блок-схему подключения сторожевого таймера (WatchDogTimer).
Назначение: обнаружение программных сбоев и, если возможно, их исправление.
Принцип работы: WDT представляет собой цифровой двоичный счетчик, тактируемый от независимого генератора. После переполнения счетчика вырабатывается специальный сигнал, который может либо генерировать сброс либо вырабатывать системное прерывание. Чтобы не вырабатывать сигнал тревоги, ЦП должен раз в определённое время вырабатывать сигнал сброса WDT