

3.1.7.4 Определение очередности посадки воздушных судов из группы
Формирование оптимальной очередности посадки S воздушных судов (самолетов), входящих ВП аэродрома плотной группой и имеющие приоритеты в посадке, состоит в расчете для каждого ВС момента времени посадки с учетом времени прибытия Тпр, интервала безопасности между очередными посадками б, приоритета самолета в посадке и необходимого времени ожидания tож посадки на траектории полета самолета от ТВХ до ТНС. В данной задаче число самолетов, прибывающих в район аэродрома, составит множество S. Самолеты этого множества имеют три вида приоритетов (j 1, 2, 3) на посадку. Приоритет №3 принят в данном множестве наивысшим. Число самолетов с этими приоритетами обозначим m1, m2, m3, при этом m1 m2 m3 S.
Предполагается, что у прибывающих S самолетов достаточно топлива, чтобы ожидать момента своей посадки. Другие самолеты, не вошедшие в число S по разным причинам, могут быть до входа в аэродромное ВП отправлены на другие аэродромы или быть приняты на посадку за счет сокращения интервала безопасности б. Приоритет ВС, в общем, отражает состояние ВС: недостаток топлива для ожидания, неисправность на борту, ранг ВС.
Формирование потока самолетов, совершающих посадку в назначенное время, производится следующим образом.
1. Для всех самолетов из множества S, вошедших в ВП аэродрома и взятых АСУП на «обработку» и управление, рассчитывается время прибытия в расчетную точку аэродрома Т\s \up1(пр (iS, jG) как минимальное время полета от ТВХ до ТНС и далее по траектории снижения и посадки по приведенным выше формулам.
2. Рассчитываются моменты посадок ВСij c приоритетом j 3, входящих в подмножество m2, в виде значений времени последовательных посадок Т (z 1, 2, …, m3) с учетом Т и времени ожидания i-го самолета по причине выдерживания интервала безопасности б между ВСi, имеющих тот же приоритет j 3. Время ожидания ВСij t вычисляется следующим образом:
t Kt,
где t — время выполнения ВС виража с максимально допустимым углом крена доп.
Коэффициент K определяется следующим образом:
K ,
где 0 — если ожидания не требуется; 1 — минимально возможное время ожидания ВСij (самый короткий по времени вираж); 1,1; 1,2; 1,3 (например) — ряд коэффициентов, повышающих время ожидания от t до необходимого за счет увеличения радиуса виража ВС.
По рассчитанному ряду времен ожидания, начиная от t и выше (с дискретностью коэффициента K не более величины ошибок при выдерживании экипажем ВС времени ожидания), определяются параметры виража ВСij соответствующие необходимому t:
ij arctg ; rij .
Время первой посадки некоторого ВСij из множества m3 с приоритетом j 3:
Т\s \up1(п1 {Т\s \up1(пр}, im3.
Время второй посадки ВСij из множества m3 с приоритетом j 3:
Тп1 б Т\s \up1(п2 {Т\s \up1(пр Kt}, i(m31).
Время очередной посадки ВСij из множества m3 с приоритетом j 3:
Тп(z1) б Т\s \up1(п2 {Т\s \up1(пр Kt}, i(m3(z1)).
Время последней посадки ВСij из множества m3 с приоритетом j 3:
Тп(m1) б Т\s \up1(пm {Т\s \up1(пр Kt}, i(m3(m31)) 1.
3. Рассчитываются моменты посадок ВСij с приоритетом j 2, входящих в подмножество m2. Времена посадок этой группы ВС учитывают времена посадок ВС более высокого приоритета и ВС, имеющих тот же приоритет, т.е j 2.
Время первой посадки ВСij из множества m2 с приоритетом j 2:
(Тп(i1) б) Т\s \up1(пi {Т\s \up1(пр Kt} (Тп(i1) б), im2.
Время второй посадки ВСij из множества m2 с приоритетом j 2:
(Тп(i1) б) Тп2 {Т Kt} (Т б), i(m21), j(2;3).
Время очередной посадки ВСij из множества m2 с приоритетом j 2:
(Тп(i1) б) Т {Т Kt} (Т б), i(m2(z1)), j(2;3).
Время последней посадки ВСij из множества m2 с приоритетом j 2:
(Тп(i1) б) Т {Т Kt} (Т б), i(m2(m21)), j(2).
4. Рассчитываются моменты посадок ВСij с самым низким приоритетом j=1, входящих во множество m1. Времена посадок этой группы ВС учитывают времена посадок ВС с более высокими приоритетами и ВС, имеющих тот же приоритет, т.е. j 1.
Время первой посадки ВСij из множества m1 с приоритетом j 1:
(Тп(i1) б) Т\s \up1(пi {Т\s \up1(пр Kt} (Тп(i1) б), im1.
Время второй посадки ВСij из множества m1 с приоритетом j 1:
(Тп(i1) б) Т\s \up1(пi {Т\s \up1(пр Kt} (Тп(i1) б), i(m11).
Время очередной посадки ВСij из множества m1 с приоритетом j 1:
(Тп(i1) б) Т\s \up1(пi {Т\s \up1(пр Kt} (Тп(i1) б), i(m1(z1)).
Время последней посадки ВСij из множества m1 с приоритетом j 1:
(Тп(i1) б) Т\s \up1(пi {Т\s \up1(пр Kt} (Тп(i1) б), i(m1(m11)).
5. Времена ожидания от tож min до tож max и времени посадок Тп для каждого ВСij рассчитывается на ЭВМ, исходя из времени прибытия Тпр и приоритета ВС. Очередность посадок ВС реализуется путем передачи с КП (КДП) на борт ВСi, где i — номер борта или позывной командира ВС, по радиотелефону управляющих команд: вид разворота, угол разворота и время полета по дуге круга в ТВХ; курс и время полета по прямой; параметры виража для назначенного времени ожидания на траектории полета к последнему развороту (если ожидание для данного ВС необходимо); вид разворота, угол разворота и время полета по дуге круга для входа в точку начала снижения ТНС.
Данная задача предусматривает расчет времени посадки для любого количества самолетов S и трех видов приоритетов. Добавив к решающему правилу математические выражения для определения моментов посадок ВСij c приоритетами j>3, можно формировать поток посадок любого количества ВС с заданным числом приоритетов.
Пример формирования очередности посадок ВС с учетом ожидания назначенного времени посадки показан на рисунке 3.29.
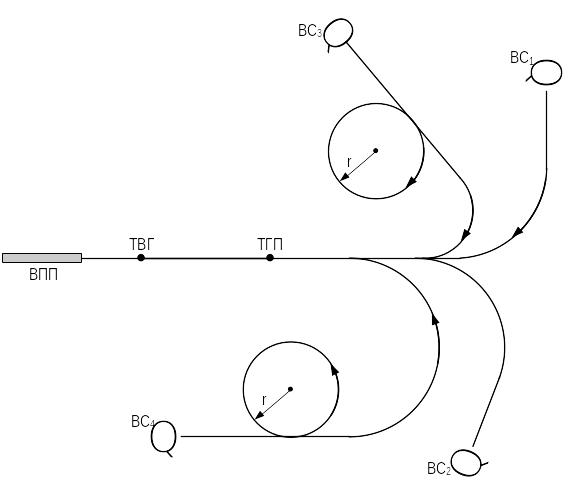
Рисунок 3.29 — Пример формирования очередности посадок ВС с учетом ожидания входа на предпосадочную прямую