

1.8 Определение запаса устойчивости по фазе на лчх
Критерий устойчивости, основанный на логарифмических частотных характеристиках разомкнутой системы, это основной метод анализа и синтеза динамических систем, позволяющий оценить устойчивость замкнутой системы по поведению её в разомкнутом состоянии.
Если ЛАЧХ пересекает ось частот раньше, чем фазовая характеристика, то такая система устойчива.
Используя вычислительную среду SamSim приведем графики ЛАЧХ и ЛФЧХ исходной и скорректированной систем, соответствующих различным коэффициентам разомкнутой системы.
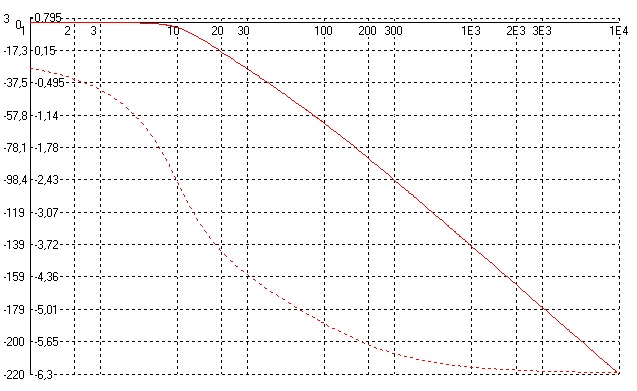
Рисунок 12 – Графики ЛАЧХ и ЛФЧХ
Как видно из графиков системы являются устойчивыми. Запас устойчивости по фазе Δφ=40º.

Рисунок 13 – Графики ЛАЧХ и ЛФЧХ при уменьшении коэффициента усиления
Как видно из графиков система является устойчивой. Значит устойчивость по фазе Δφ=50 %.
Таким образом, можно сделать вывод, что изменяя коэффициент усиления можно влиять на запас устойчивости по фазе. При увеличении коэффициента усиления устойчивость по фазе падает, а при уменьшении запас устойчивости по фазе растет.
1.9 Коррекция сау за счет введения последовательного корректирующего устройства
Для выполнения требований по устойчивости, точности и качеству переходных процессов применяют коррекцию динамических свойств САУ. Коррекция используется для обеспечения устойчивости неустойчивой САУ, расширения запасов и области устойчивости, повышения качественных показателей переходных процессов. Коррекция осуществляется с помощью введения в систему корректирующих звеньев с определенной передаточной функцией.
Используя вычислительную среду SamSim, рассмотрим две структурные схемы неустойчивых автоматических систем и скорректируем САУ за счет введения последовательного корректирующего устройства.

Рисунок 14 – Структурная схема первой системы

Рисунок 15 – Структурная схема второй системы
Исходные данные:
k1=1 k3=1
T1=0,1 T2=0,4
k2=1 C=0,25
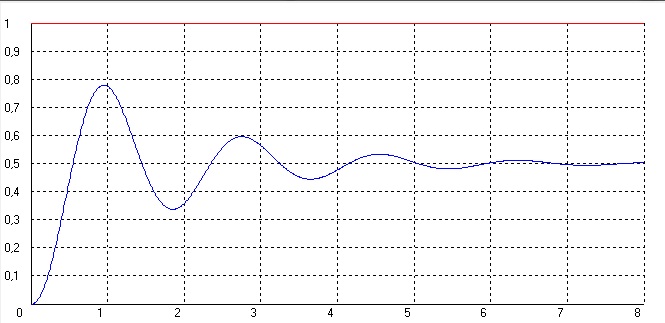
Рисунок 16 – График первой системы без корректирующего звена
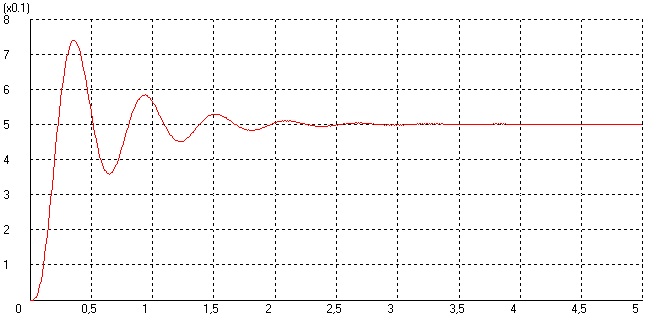
Рисунок 17 – График второй системы без корректирующего звена
Теперь представим структурные схемы с корректирующими звеньями:
Рисунок 17 – Структурная схема первой системы с корректирующим устройством
Рисунок 18 – Структурная схема первой системы с корректирующим устройством
Меняя коэффициент устойчивости К4 можно добиться устойчивости системы.
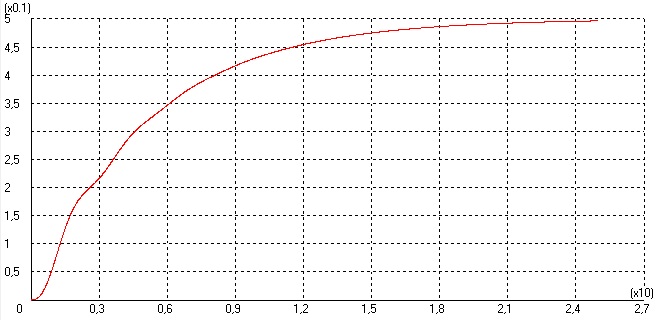
Рисунок 19 – График первой системы с корректирующим элементом
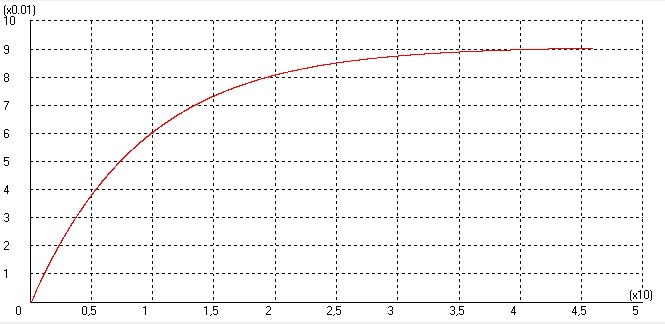
Рисунок 20 – График второй системы с корректирующим элементом
2 Исследование нелинейной системы автоматического управления
2.1 Анализ нелинейной системы автоматического управления
К нелинейным системам относятся системы, в которых связь между выходной и входной величинами одного или нескольких элементов задается нелинейными дифференциальными уравнениями. Примером существований нелинейности, которой никогда нельзя пренебречь, является релейная характеристика. Включение в систему звена с такой характеристикой придает системе качественно новые свойства.
Используя возможности вычислительной среды SamSim, проанализируем нелинейную систему автоматического управления соответствующей структурной схеме:

Рисунок 21 – Структурная схема системы
Исходные данные:
К1=10 К3=1
Т1=1 Т2=0,01
К2=5 С=1
Т3=8
При рассмотрении устойчивости таких систем необходимо оговаривать начальные условия и внешние воздействия. В связи с этим при изучении нелинейных систем употребляются понятия устойчивости в малом, в большом и в целом.
Устойчивость в малом – это устойчивость при бесконечно малых отклонениях от исходного режима. Устойчивость в большом – это устойчивость при конечных отклонениях, допустимых по условию работы системы. Устойчивость в целом – это устойчивость при неограниченных отклонениях.
Рассмотрим полученный фазовый портрет при нахождении в структурной схеме идеального двухпозиционного реле:
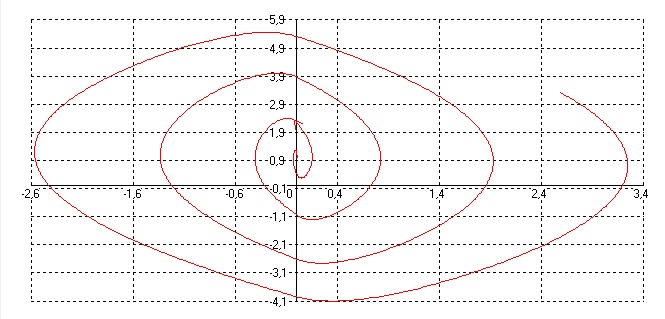
Рисунок 22 – Фазовый портрет с идеальным двухпозиционным реле
Для данного фазового портрета вводились начальные условия X0(0)=1;
Tk=1с. Как видно из фазового портрета система неустойчива в малом до того момента, пока не достигнет предельного цикла.

Рисунок 23 – Фазовый портрет с идеальным двухпозиционным реле
Для данного фазового портрета вводились начальные условия X0(0)=20; Tk=8с. Как видно из фазового портрета система неустойчива в большом до того момента, пока не достигнет предельного цикла.
Теперь заменим в структурной схеме идеальное двухпозиционное реле на двухпозиционное реле с зоной нечувствительности.
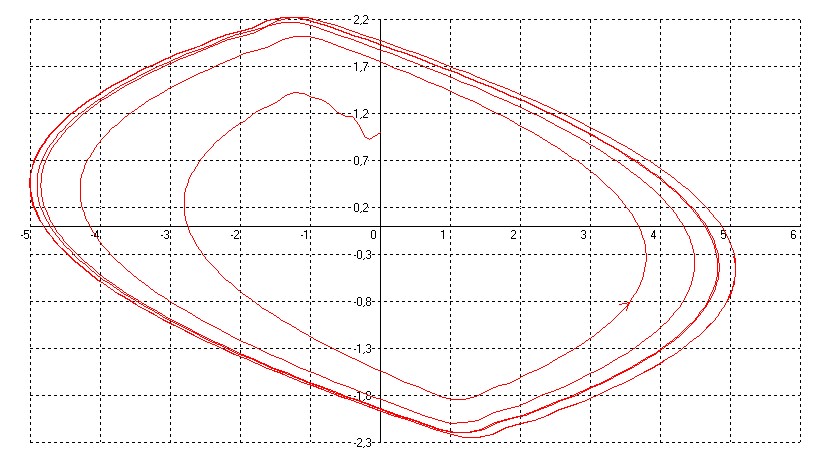
Рисунок 24 – Фазовый портрет с двухпозиционным реле с зоной нечувствительности
Для данного фазового портрета вводились начальные условия X0(0)=1; Tk=1с. Как видно из фазового портрета система неустойчива в малом до того момента, пока не достигнет предельного цикла.
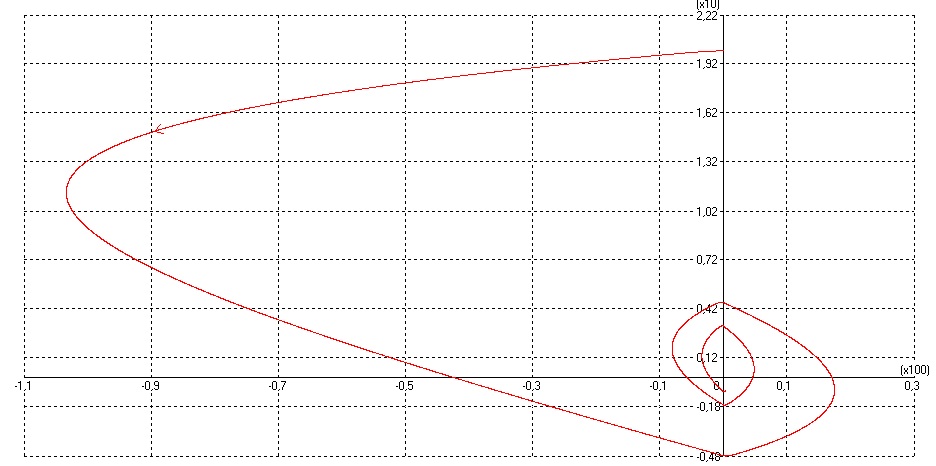
Рисунок 25 – Фазовый портрет с двухпозиционным реле с зоной нечувствительности
Для данного фазового портрета вводились начальные условия X0(0)=20; Tk=8с. Как видно из фазового портрета система неустойчива в большим до того момента, пока не достигнет предельного цикла.