

1.7 Влияние коэффициента усиления разомкнутой системы на устойчивость
Основное требование, предъявляемое системе – это устойчивость, но даже устойчивая система может оказаться неработающей. Она должна удовлетворять определенным качествам процесса управления, которое характеризуется показателями качества в установившемся и переходном режимах.
Используя вычислительную систему SamSim приведем графики переходных функций исходной и скорректированной систем, соответствующих различным коэффициентам усиления разомкнутой системы.
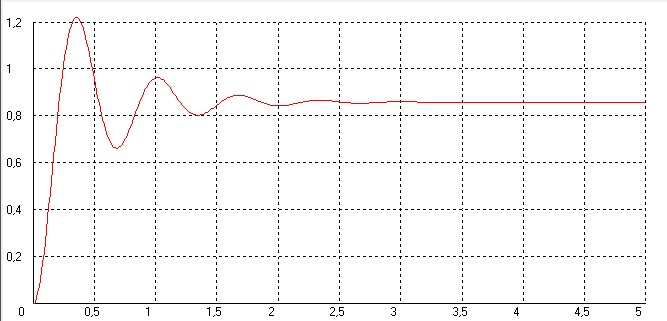
Рисунок 8 – График переходной функции исходной системы
Из приведенного выше графика можно определить основные показатели переходного процесса:
Характер переходного процесса колебательный.
Время регулирования tр = 3с – время от начального переходного процесса до момента, когда отклонение выходной величины становится близким к установившемуся значению с заданной точностью ε = 2 – 3%.
Время первого согласования t1 = 0,55с.
Максимальное отклонение ymax = 1.24.
Установившееся значение yуст = 0,9.
Перерегулирование:

Статическая ошибка:

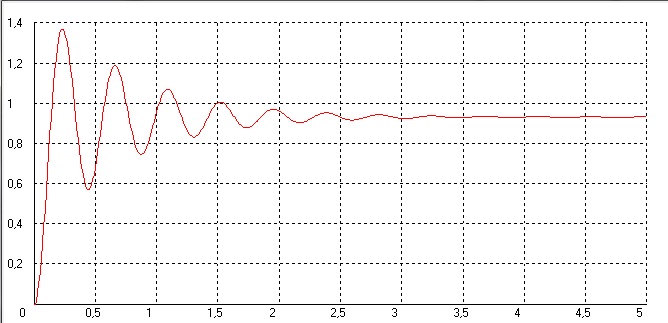
Рисунок 9 – График скорректированной системы при небольшом увеличении коэффициента усиления
Из приведенного выше график можно определить основные показатели переходного процесса:
Характер переходного процесса колебательный.
Время регулирования tр = 4с – время от начального переходного процесса до момента, когда отклонение выходной величины становится близким к установившемуся значению с заданной точностью ε = 2 – 3%.
Время первого согласования t1 = 0,1с.
Максимальное отклонение ymax = 1,3.
Установившееся значение yуст = 0,9.
Перерегулирование:

Статическая ошибка:

Таким образом уже можно сделать вывод, что при увеличении коэффициента усиления увеличивается максимальное отклонение, время регулирования, число колебаний, установившееся значение и перерегулирование, а статическая ошибка уменьшается.
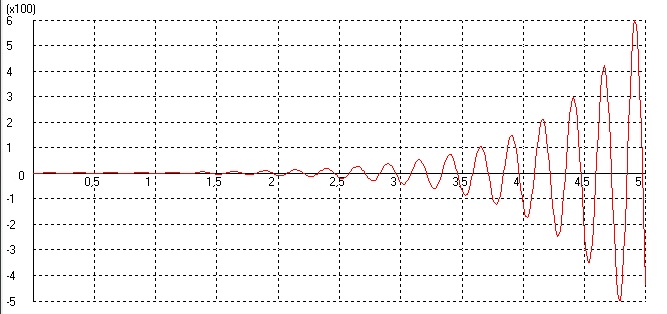
Рисунок 10 – График скорректированной системы при большем увеличении коэффициента усиления
Как видно из приведенного графика при большем увеличении коэффициента усиления система становится неустойчивой.
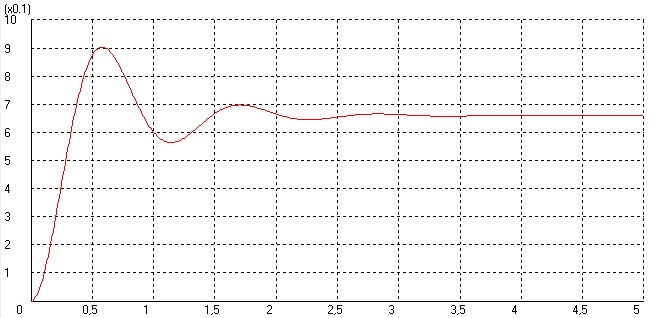
Рисунок 11 – График скорректированной системы при уменьшении коэффициента усиления
Из приведенного выше графика можно определить основные показатели переходного процесса:
Характер переходного процесса колебательный.
Время регулирования tр = 2,5с – время от начального переходного процесса до момента, когда отклонение выходной величины становится близким к установившемуся значению с заданной точностью ε = 2 – 3%.
Время первого согласования t1 = 0,9с.
Максимальное отклонение ymax = 0,9.
Установившееся значение yуст = 0,67.
Перерегулирование:

Статическая ошибка:

Таким образом можно сделать вывод, что при уменьшении коэффициента усиления уменьшается максимальное отклонение, время регулирования, число колебаний, установившееся значение и перерегулирование, а статическая ошибка увеличивается.
Исходя из полученных выводов можно сказать, что влияние коэффициента усиления разомкнутой системы весьма ощутимо. При корректировке данного коэффициента можно добиться уменьшения статической ошибки, жертвуя временем регулирования и перерегулированием или наоборот, увеличение статической ошибки и уменьшение перерегулирования и времени регулирования.