

5.2 Функциональная, структурная схема привода, передаточные функции звеньев. Работа электропривода
Замкнутый следящий привод ПР представляет собой систему подчиненного регулирования. Она состоит из ряда контуров, число которых равно числу регулируемых переменных (или числу больших постоянных времени системы, подлежащих компенсации), причем каждый внутренний контур регулирования подчинен следующему по порядку внешнему (по отношению к внутреннему) контуру. Эта подчиненность выражается в том, что заданное значение регулируемой переменной любого внутреннего контура определяется выходным сигналом регулятора следующего по порядку контура. В результате все внутренние контуры работают как подчиненные задаче регулирования выходной координаты системы. Каждый контур строится по принципу регулирования по отклонению (по ошибке) и имеет свою обычно жесткую отрицательную обратную связь по регулируемой переменной и свой регулятор (суммирующий усилитель). Для каждого внешнего контура внутренний контур (или несколько внутренних контуров) входит в состав объекта регулирования [8].
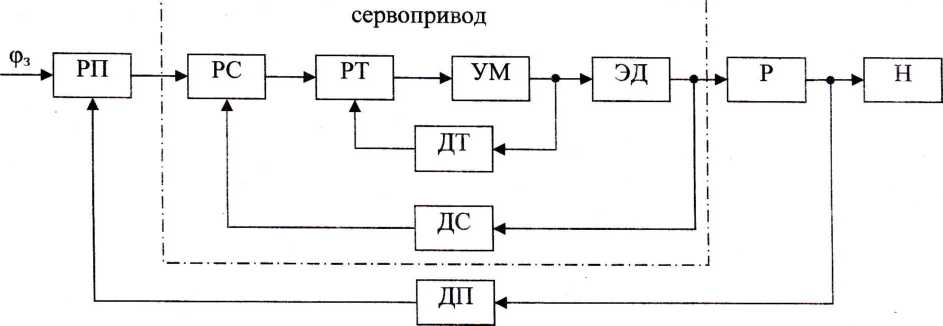
Рисунок 5.1-Функциональная схема замкнутого следящего электропривода ПР
Общая функциональная схема замкнутого следящего ЭП, отрабатывающего заданный угол поворота φ3, с подчиненными контурами регулирования силы тока и частоты вращения, изображена на рисунке 5.1 [10]. Первый контур образован двигателем (ЭД) с усилителем мощности (УМ), датчиком (ДТ) и регулятором (РТ) тока. Во второй контур входят также датчик скорости (частоты вращения) (ДС) и регулятор скорости (PC). Третий контур дополнительно содержит датчик положения (угла) (ДП) и регулятор положения (РП). Выходной сигнал регулятора каждого внешнего контура является задающим для последующего контура, заключенного внутри его. Звено (-ья) манипулятора и перемещаемый груз служат нагрузкой (Н), которая связана с двигателем через редуктор (Р). Блоки PC, РТ, УМ, ЭД и обратные связи с ДТ и ДС образуют сервопривод, т. е. в данном случае ЭШИМ-1.
Структурная схема разрабатываемого ЭП представлена на рисунке 5.2 [8]. Передаточные функции соответствующих звеньев схемы расписаны ниже.
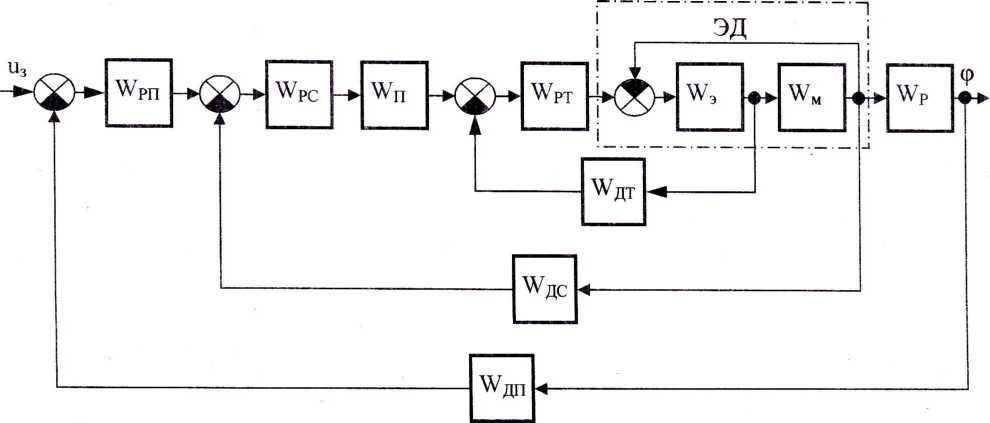
Рисунок 5.2-Структурная схема замкнутого следящего электропривода
ДПТ независимого (параллельного) возбуждения представляет собой замкнутую структуру, которую образуют электрическая и механическая части с передаточными функциями:
Wэ(p)= , (5.1)
, (5.1)
Wм(p)= , (5.2)
, (5.2)
где Тэ, Тм - рассчитанные ранее (см. раздел 4.3) электромагнитная и механическая постоянные времени; р - комплексная переменная.
Регуляторы тока, скорости и положения в основном имеют передаточные функции ПИ-регулятора:
Wрт(p)= , (5.3)
, (5.3)
Wрт(p)= , (5.4)
, (5.4)
Wрт(p)= , (5.5)
, (5.5)
где крт, кРС, крп и Трт, ТРС, ТРП - соответственно коэффициенты передачи и постоянные времени регуляторов по току, скорости, положению.
Преобразователь представлен как апериодическое звено 1-го порядка:
Wп(p)= , (5.6)
, (5.6)
где кп, Тп - коэффициент передачи и постоянная времени преобразователя.
Передаточная функция редуктора определяется его передаточным числом:
Wп(p)= . (5.7)
. (5.7)
Датчики тока, скорости и положения чаще всего представляют, как безынерционные звенья, т. е. пропорциональные элементы:
Wдт(p)=kдт, (5.8)
Wдс(p)=kдс, (5.9)
Wдп(p)=kдп, (5.10)
где кдт, кдс, кдп - коэффициенты передачи датчиков по току, скорости и положению.
На структурной схеме u3 - это задающее напряжение, при подачи которого на вход системы, на ее выходе отрабатывается угол поворота φ.
На данном этапе проектирования ЭП, когда выбран конкретный тип двигателя, необходимо определиться с составом и исполнением (типом) сервопривода, После этого обычно оформляют заказ либо на изделие, либо только на его техническую документацию; определяют динамическую модель заданной части системы привода (согласно функциональной схеме); рассчитывают параметры регулятора положения, корректирующих устройств и реализуют их на аналоговых или цифровых элементах. В последнем случае понадобится еще и цифро-аналоговый преобразователь, так как серийные сервоприводы воспринимают аналоговый сигнал ω3 задания скорости в диапазоне ±10 В (границам этого интервала соответствует максимальная скорость) [10].
ЭШИМ1 является многокоординатным приводом, т. е. может осуществлять управление до трех ЭД по соответствующим координатам ПР. Поэтому, ориентируясь на единую систему управления манипулятором, рационально было бы выбрать тип привода для трех ЭД. Однако, в силу отсутствия информации по двум другим двигателям, берем привод типа ЭШИМ1-300000207УХЛ4 с блоками регулирования типа БС3001-322ФУХЛ4 (для серий двигателей ПЯ и ДПУ) и питания типа БС9802-325ФУХЛ4. Напряжение трехфазной питающей сети 380 В, 50 Гц [11].
Технические характеристики устройства питания БС9802-325ФУХЛ4:
напряжение питания цепей управления 15 В;
номинальное выходное напряжение 150 В;
номинальный ток 16 А;
климатическое исполнение УХЛ4;
габариты 200x300x161 мм;
масса 8,5 кг.
Технические характеристики статического преобразователя для ЭП постоянного тока БС3001-322ФУХЛ4:
напряжение питания цепей управления 15 В;
напряжение питания силовой цепи 150...220 В;
номинальный ток 16 А;
реверсивный широтно-импульсный для питания якоря;
климатическое исполнение УХЛ4;
габариты 200x300x161 мм;
масса 10 кг.
БП и БР выполнены в виде самостоятельных блоков исполнения IP00 одностороннего обслуживания. Блоки предназначены для встройки в шкафы комплектных устройств.
Кроме того, в состав комплектного привода входят автоматический выключатель, магнитный пускатель с приставкой, согласующий трансформатор и якорный дроссель. Также могут входить встроенный тормоз и датчик пути, питание которых осуществляется отдельно потребителем.
Рекомендуемый тип якорных дросселей для тока 16, 25 А - ДСА-552. Его габариты 115x150x133 мм, а масса 4,1 кг.
Тип согласующего трансформатора выбирается по мощности второй обмотки, определяемой исходя из параметров выбранных двигателей по формуле:
Pтр=1,05Kодн , (5.11)
, (5.11)
где N - число ЭД;
Кодн - коэффициент одновременности работы двигателей (1-1; 2-0,7; 3-0,65);
Кзагрi - коэффициент загрузки трансформатора, зависящий от скорости i-гo ЭД;
 -максимальное
напряжение на якоре ЭД, соответствующее
допустимому
-максимальное
напряжение на якоре ЭД, соответствующее
допустимому
значению максимальной скорости вращения двигателя:
 =cωmax+IнRя, (5.12)
=cωmax+IнRя, (5.12)
где c-конструктивная постоянная ЭД;
ωmax-допустимая максимальная скорость вращения ЭД;
Iн-номинальный ток i-го двинателя;
Rя-сопротивление якорной цепи;
Так как на исходной скоростной диаграмме ЭП отсутствуют участки, где двигатель работает с пониженной скоростью при позиционировании, то
Кзагр1=1.
Максимальное напряжение на якоре ЭД найдем на основании данных раздела 3:
=cωmax+IнRя; (5.13)
=0,4*314,16+5,3*2,2=137,32(В).
Для номинального
тока привода 16 А Pу=60
В А.
Тогда для N=1
по формуле (5.11) имеем:
А.
Тогда для N=1
по формуле (5.11) имеем:
Pтр=1,05*1*1*137,32*5,3+1*60=824,19(В А).
По таблице из технического описания [11] выбираем согласующий трансформатор ТСМ-764 мощностью 1,0 кВ А с фазным напряжением 64,1 В (27,8 В- на третьей; 127 В - на четвертой) и выпрямленным 150 В на вторичной обмотке. Габариты трансформатора 224x219x114 мм, масса 15,35 кг.
Номинальный режим работы сервопривода — продолжительный (S1) при скорости не менее 0,1 об/мин. Допускается работа в кратковременном (S2) и повторно-кратковременном режимах (S3) при следующих условиях.
а) максимальная кратность перегрузки по току не более 2,5 в течении 5
с;
б) среднеквадратичный ток за время цикла не превышает номинальный.
ЭШИМ1
в режиме регулирования скорости
обеспечивает технические характеристики
в соответствии с таблицей 5.1. При этом
крутизна характеристик ТГ должна
быть не менее 0,02 пульсации напряжения не более 2% (на
входном фильтре обратной связи привода)
и ∆ реверса должна быть менее,
указанной в таблице. Параметры
регулирования скорости обеспечиваются
при неизменных значениях задающего
напряжения и его пульсациях не более 2
%
от установленного значения.
пульсации напряжения не более 2% (на
входном фильтре обратной связи привода)
и ∆ реверса должна быть менее,
указанной в таблице. Параметры
регулирования скорости обеспечиваются
при неизменных значениях задающего
напряжения и его пульсациях не более 2
%
от установленного значения.
Таблица 5.1-Регулирование скорости ЭШИМ1
Скорость двигателя |
Погрешность скорости ∆, %, не более |
Коэффициент неравномерности вращения, не более |
||
суммарная |
при изменении нагрузки |
при реверсе |
||
nmax |
1.5 |
0.1 |
0.5 |
0.05 |
0.1 nmax |
2.5 |
1 |
1 |
0.1 |
0.01 nmax |
5 |
2 |
2 |
0.1 |
0.001 nmax |
15 |
5 |
5 |
0.15 |
0.0001 nmax |
25 |
10 |
10 |
0.25 |
Как видно, встроенный в выбранный ЭД (см. подраздел 3.1) тахогенератор ТП80-20-0,2 полностью подходит для ЭШИМ1 и сервопривод считаем уже собранным.
Третий контур замкнутой системы привода содержит датчик положения и регулятор положения. Для измерений угловых перемещений передней руки манипулятора выбираем абсолютный датчик углового положения ЛИР-ДА136А исполнения 3 [12]. Он удовлетворяет данной по заданию допускаемой неточности позиционирования ∆ . Технические данные датчика ЛИР-ДА136А приведены в таблице 5.2.
Таблица 5.2 - Механические и электрические характеристики ЛИР-
ДА136А
Параметр |
Значение |
||
1 |
2 |
||
максимальная разрешающая способность |
12 |
||
тип выходного кода |
код Грея, двоичный код |
||
максимальная скорость вращения вала без сбоя выходного кода, об/мин |
1500 |
||
способ выдачи данных |
парал лельный |
парал лельно- байтовый |
последовательный SSI |
напряжение питания, В |
+5 |
+5 |
+5 |
вид выходного сигнала |
ТР (стандартный TTL) |
ТР, ОС (открытый коллектор), ОЕ (открытый ЭММИ- тер) |
RS (стандарт RS- 485) |
ток потребления, <мА. |
150 |
150 |
150 |
соединитель при исполнениях 3, 4 |
С (DB- 15М) |
С |
А (РС10ТВ), В (DB- 9М) |
точность |
±150” |
||
максимальная скорость вращения вала, об/мин |
10000 |
||
РП в данном проекте однозначно не выбирается. Считаем, что РП входит в состав некоторого устройства числового программного управления (УЧЕТУ), имеющего также микропроцессорную систему управления (МСУ), а также различного типа преобразователи - аналого-цифровые (АЦП), цифроаналоговые (ЦАП). Реализуют УЧПУ на аналоговых или цифровых элементах.
Структурно-функциональная схема ЭП на основе сервопривода ЭШИМ1-300000207УХЛ4 приведена на листе формата А1, прилагаемом к проекту.
Электропривод производит преобразование трехфазного напряжения питающей сети в напряжение постоянного тока, подаваемое на якорь двигателя, и регулирование его в функции задания с целью поддержания требуемых режимов работы двигателя.
Питание силовой части электропривода осуществляется от второй обмотки (зажимы al, b1, cl), системы управления — от третьей обмотки (зажимы a2, b2, с2), а вентиляторов блоков регулирования и питания от четвертой обмотки (аЗ, bЗ, сЗ) согласующего трансформатора Т.
Первая обмотка трансформатора Т подключается к питающей сети через автоматический выключатель QF.
После включения автоматического выключателя QF подается напряжение на схему управления БП и на двигатели вентиляторов. При этом включается магнитный пускатель К1 и своими нормально разомкнутыми контактами подключает к трансформатору силовую часть БП. На выходах блока питания 60
появляется напряжение питания БР: постоянное - для питания силовых схем и переменное стабилизированное - для питания систем управления.
Если в блок питания поступает сигнал разрешения работы БП из БР, а также сам блок питания готов к работе, магнитный пускатель К1 остается во включенном состоянии. В противном случае пускатель К1 через небольшую выдержку времени после подачи питания отключится и замыкающими контактами К1 отключит силовую часть ЭП, а размыкающим контактом приставки К2 подключит в БП цепь динамического торможения двигателей и замыкающим контактом снимет сигнал "Отсутствие аварии привода'*.
При этом питание цепей управления остается, что позволяет произвести диагностику неисправности блоков регулирования и питания.
Для информации о состоянии ЭП из БР поступают сигналы "Готовность к работе" в виде так называемого сухого контакта. Таким же способом организованы сигналы в БР "Отключение тормоза".
Блок питания типа БС9802 с номинальным током 16 и 40 А обеспечивает работу от 1 до 3 БР. В состав БП входят:
выпрямитель силовой цепи VI, V3, V5;
сглаживающий фильтр силового напряжения С2-С7;
разрядник для ограничения перенапряжений в силовой цепи, возникающих при торможении двигателя или со стороны питающей сети, состоящий из резисторов R27, R29, R31, R32, R35, R36 и силового транзисторного ключа ТК (VI7, VI9, V21, V27, V29), управляемого нуль-органами HO1 и Н02 через транзистор VI6;
разрядник для обеспечения аварийного динамического торможения двигателей, состоящий из логических элементов ЛЭ4, ЛЭ5, выдержки времени τ3 (R16, R18, С12), резистора R39, катушки индуктивности L2 и оптронного модуля V32, включаемый при отключении внешнего контактора К1 контактами контактной приставки К2;
-устройство защитного отключения при авариях в блоках регулирования и питания, выполненное на микросхемах D2.3, D2.4, выдержках времени τ1, τ2, нуль-органе НОЗ, логических элементах ЛЭ1-ЛЭЗ и реле К1, которое осуществляет управление внешним контактором К1;
- источник питания цепей управления, преобразующий нестабильное переменное напряжение третьей обмотки силового трансформатора в стабилизированное переменное напряжение прямоугольной формы 24 В, 5 кГц; он состоит из выпрямителя с фильтром (V33, С13), импульсного стабилизатора (V51, V52, LI, С23, С24, F1) со схемой управления и защиты (PH, PT, V47, V49, V50, Н05, т4) и высокочастотного генератора (V57, V58, V59, V60, V61, V62, V64, V65).
Импульсный стабилизатор источника питания цепей управления обеспечивает стабилизированное постоянное напряжение 48 В на конденсаторах С23, С24. Регулировка этого напряжения осуществляется резистором R41. Система управления стабилизатора двухконтурная с ПИ-регулятором напряжения PH (Dl.l, R43, С18, R41) и безынерционным релейным регулятором тока РТ (D1.2, R48-R52). Кроме этого, система управления стабилизатора содержит время-токовую защиту, состоящую из инерционного звена τ4 (R44, С16) и
нуль-органа Н05 (V43, V44, V45, R46), которая обеспечивает блокировку включения транзистора V51 при длительных перегрузках стабилизатора. Предусмотрена возможность возврата стабилизатора в рабочее состояние кратковременным закорачиванием выводов "Сброс защиты ИП".
Высокочастотный генератор преобразует выходное напряжение импульсного стабилизатора в переменное напряжение прямоугольной формы. Схема содержит задающий генератор Г (А2, R64, R66, R67, С21), блокирующую цепь (R74, С22, V57-V59), для устранения режима "Сквозных токов" и силовой выходной каскад V60, V61, V62, V64, V65.
При аварии в БП и некоторых авариях в БР возникает необходимость отключения силовой части ЭП от силового трансформатора и быстрого торможения двигателя. Такое отключение осуществляется внешним контактором К1 при отключении реле К1 в БП по команде с микросхемы ЛЭ2, на которой происходит логическое умножение сигналов об исправности блоков питания и регулирования, которые в нормальных рабочих условиях соответствуют логической единице.
Одновременно с отключением К1 замыкающий контакт К2 сообщает внешним устройствам (например, ЧПУ) об аварии в схеме привода, а размыкающий - включает "Аварийное торможение". При этом через логические элементы D3.4 и D1.1 включается оптронная пара V32.2, а затем, с выдержкой времени τ3 (R16, R18, С12), через D1.2 оптронная пара V32.1. Выдержка времени τ3 обеспечивает исключение броска тока, вызываемого разрядом конденсаторов С2-С7.
Необходимость отключения внешнего контактора К1 возникает при следующих авариях в БП неправильная работа транзисторного ключа разрядника или его перегрев, большие перенапряжения — сравнительно большой длительности, снижение силового питающего напряжения, снижение напряжения источника питания цепей управления.
При снижении напряжения питания ниже уровня удержания реле К1 также происходит отключение силовой схемы ЭП.
Если защитные устройства возвращаются в рабочее положение за время, меньшее времени отключения реле К1, то отключение привода не происходит.
После срабатывания защиты и отключения внешнего контактора К1 ЭП возвращается в рабочее состояние переключением автоматического выключателя QF.
Блок регулирования БС3001 является основным элементом ЭП, осуществляющим широтно-имлульсную модуляцию напряжения, подводимого к якорю двигателя. БР обеспечивает работу одной координаты механизма в замкнутой по скорости системе регулирования. В состав БР входят;
транзисторные ключи ТК1-ТК4 с блоками управления ключом БУК1-
БУК4;
обратный диодный мост V28.1-V28.4;
блок управления, в котором собрана система регулирования.
Система регулирования двухконтурная с ПИ-регулятором скорости PC и релейным регулятором тока.
Регулятор скорости выполнен с перестраиваемой в функции скорости коррекцией. Необходимость этого обуславливается наличием пульсаций в напряжении ТГ при повышенных скоростях.
При достижении скорости двигателя примерно 0,25nmax контакт реле К4 размыкается, что вызывает увеличение коэффициента усиления пропорциональной части PC примерно в 3 раза. Для уменьшения уровня помех в сигналах задания и обратной связи по скорости, поступающих на входы PC, в их цепь включены буферные дифференциальные усилители А1 и А2, на выходах которых формируются нормированные сигналы задания скорости и обратной связи по скорости. При максимальной скорости эти сигналы устанавливаются примерно равными 10 В.
Релейный регулятор тока, выполненный на нуль-органах Н01-Н03, через оптронные гальванические развязки в блоках управления ключами БУК1— БУК4 управляет силовыми транзисторными ключами ТК1-ТК4, создающими следующие режимы работы:
режим «2» («Р2») - включены ключи ТК1 и ТК4 или ТК2 и ТКЗ в зависимости от полярности задания тока;
режим «1» («Р1») — включен один из ключей ТК1 или ТКЗ, ток двигателя течет через открытый ключ и один из диодов обратного моста;
режим «0» («Р0») - выключены все транзисторные ключи, ток двигателя течет через диоды обратного моста в источник постоянного напряжения (заряжается С14).
Режимы работы выбираются нуль-органами Н01-Н03. Нуль-орган Н04, на вход которого подается сигнал задания тока, задает направление тока якоря двигателя.
Регулятор
тока работает следующим образом. На
входы Н01-Н03 поступает разность
сигналов заданного значения тока i3
и истинного значения тока якоря id,
снимаемого с безынерционного датчика
тока ДТ. Кроме того, на входы
Н02 и НОЗ подаются соответственно
положительное и отрицательное смещения,
определяющие пороги этих нуль-органов
и, соответственно, нижнюю i3-∆I
и
верхнюю
i3+∆i
границы
возможных значений истинного тока.
Нуль-органы включают и отключают ключи
ТК1-ТК4 безусловно или через выдержку
времени τ1,
в соответствии с выше приведенными
режимами. Выдержки τ1,
позволяют ограничить частоту коммутации
ключей, которая не может быть больше,
чем fгр= , и гарантируют разряд защитного
конденсатора, включенного параллельно
ключам. Величина τ1,
выбирается в пределах (0,5-1,0) мс из условия
допустимых коммутационных потерь.
, и гарантируют разряд защитного
конденсатора, включенного параллельно
ключам. Величина τ1,
выбирается в пределах (0,5-1,0) мс из условия
допустимых коммутационных потерь.
Выдержка времени τ0 необходима для гарантированного размагничивания дросселей L1.1-L1.4.
Датчик тока выполнен на тороидальных трансформаторах Т2, ТЗ, операционных усилителях А10.1 и А10.2 (на прилагаемой схеме не указаны) с усилителями мощности на транзисторах V39-V42 и V46, V47 (также не указаны). Трансформатор Т2 и усилитель А10.1 образуют измерительный высокочастотный автогенератор. Его выходной сигнал (среднее значение тока вторичной обмотки трансформатора Т2), пропорциональный току двигателя, через вторичную обмотку трансформатора ТЗ, выполняющего роль безынерционного (для полезного сигнала) фильтра, поступает на вход усилителя А10.2, с помощью которого преобразуется в постоянное выходное напряжение ДТ).
Пример отработки системой регулирования гармонического сигнала задания тока приведен на рисунке 5.4 [11].
Выпрямитель В1 преобразует реверсивный выходной сигнал усилителя А2 в однополярный. Нуль-орган Н05 в функции этого сигнала с помощью реле К4 осуществляет переключение коррекции PC. Нуль-орган НО6 переключается при скорости, близкой к нулевой, и, совместно с сигналом "Разрешение работы", управляет работой реле К2 и КЗ.
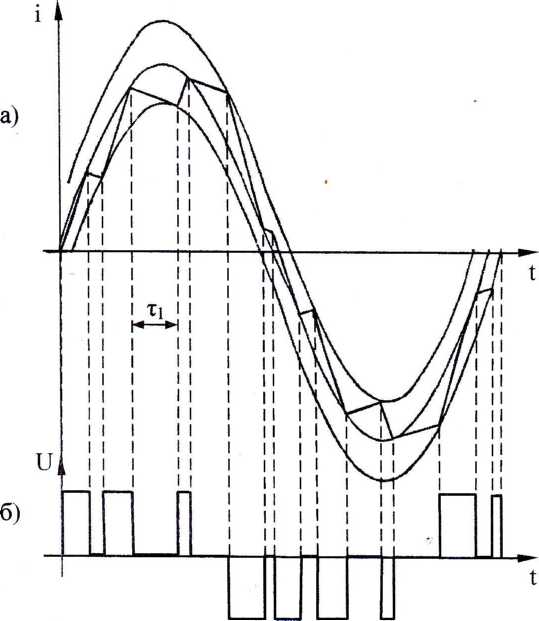
Рисунок 5.4 - Работа системы регулирования тока: а) отработка гармонического сигнала задания тока; б) напряжение, прикладываемое к двигателю
В БР предусмотрены две группы защит: аварийная и технологическая.
В состав аварийной входят:
максимально-токовая защита;
защита то несоответствия скорости двигателя заданию (ЗН);
защита от понижения стабилизированного напряжения +15 В (ЗПН);
Максимально-токовая защита собрана в каждом из четырех БУК и работает по принципу контроля тока, протекающего по дросселям L1.1-L1.4. Информация о срабатывании максимально-токовой защиты поступает в блок управления.
При срабатывании любой из аварийных защит снимаются сигналы управления с транзисторных ключей, размыкаются контакты реле К5 "Готовность к работе” и К6 "Аварийная защита БР", ЭП переходит в режим динамического торможения.
В состав технологической защиты входят:
времятоковая защита двигателя (ТВЗ);
тепловая защита БП, БР и двигателя (ТЗ).
При срабатывании технологических защит снимаются сигналы управления с транзисторных ключей и размыкается контакт реле К5 "Готовность к работе".
Приведение ЭП в рабочее положение осуществляется кнопками сброса защит, которые в комплект ЭП не входят, или переключением автоматического выключателя QF, т. е. отключением и повторным включением напряжения питающей сети.