

3.2.2. Модели многосвязных систем
Для современных АСУ ТП характерно объединение в единую систему отдельных приводов и механизмов и даже объединение сложных технологических агрегатов в комплексно-автоматизированные технологические линии, гибкие автоматизированные производства. Примерами первых могут служить станки с ЧПУ, отрабатывающие при обработке детали сложные траектории и обеспечивающие оптимальный режим резания; примерами вторых — технологические линии прокатного производства. Основной особенностью таких систем является невозможность рассмотрения их как механической совокупности отдельных механизмов. Это обусловлено взаимосвязью и взаимовлиянием друг на друга управляемых технологических параметров.
Для обеспечения требуемого качества продукции необходимо одновременно управлять многими взаимосвязанными переменными (технологическими параметрами) путем непрерывного воздействия на различные исполнительные механизмы. В подобных системах изменение одного управляющего или возмущающего воздействия вызывает изменение нескольких управляемых переменных и наоборот - каждая управляемая переменная зависит от нескольких управляющих воздействий. Многосвязными являются большинство систем, у которых есть несколько возможностей управлять одним объектом, подверженным обычно нескольким внешним воздействиям. Подобные системы называют также многоканальными или многомерными.
В многоканальных системах в отличие от одноканальных входные воздействия и выходы объекта в каждый момент времени описываются как многомерные векторы, а сам объект — оператором А, преобразующим вектор входных воздействий X в вектор выходных переменных Y:
![]() (3-4)
(3-4)
В этом случае можно говорить об аналогии между оператором А и передаточной функцией в одноканальных системах. В многокаиальных системах решаются те же задачи, что и в одноканальных, т.е. стабилизация, программное и следящее управление, оптимизация. Здесь также решается вопрос об устойчивости системы, качестве ее динамики. Представляя систему многомерной, необходимо уметь путем структурных преобразований упрощать внутреннюю структуру сложной системы, соединять eе с другими системами и т.д. Самостоятельной задачей является получение и представление формализованных моделей таких систем.
Основным физическим принципом, положенным в основу аналитических методов получения моделей многомерных объектов, является метод универсальных уравнений.
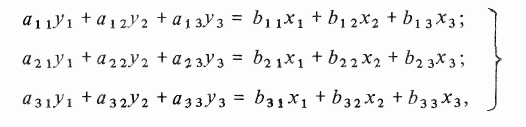
Записав уравнения по типу (3.2), получим, например, для установившегося режима трехсвязной линейной системы уравнения вида
 (3.5)
(3.5)
где x1, х2, х3 — входные, a y1 у2, y3 — выходные переменные;ij, bij; — коэффициенты — вещественные числа, которые могут принимать также и нулевые значения.
При записи уравнений динамики структура системы уравнений будет аналогичной (3.5), но вместо yj и хi будут фигурировать временные функции xi (t) и yj (t) или их операторные изображения xi(p) и yj(р) а вместо коэффициентов ij, bij— операторные полиномы.
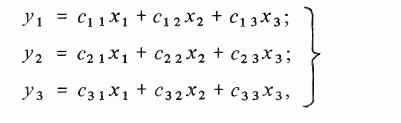
После решения системы уравнений (3.5) или ее динамического аналога она принимает вид
 (3.6)
(3.6)
где cij- вещественный коэффициент для уравнений статики или передаточная функция для уравнений динамики.
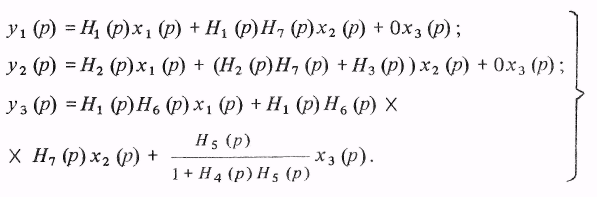
Модель системы в виде уравнений (3.5) или (3.6) может быть определена любой внутренней структурой, т.е. связи между каналами могут быть обусловлены непосредственным взаимодействием переменных, прямыми связями входа с различными выходами и обратными связями от выходов к входам. На рис. 3.1 приведена система, обладающая указанными свойствами.Эту систему можно описать следующими уравнениями:
-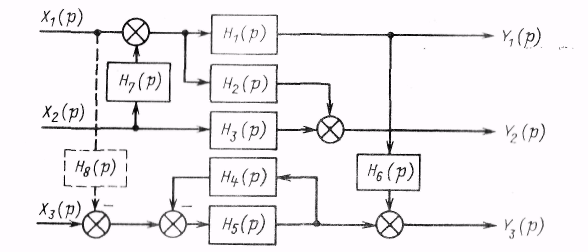
Рис. 3.1. Пример трехсвязной структуры
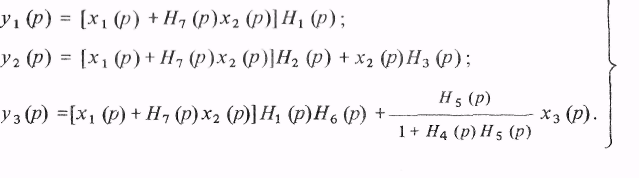
(3-7)
После преобразований система (3.7) принимает вид, аналогичный (3.6):
 (3.8)
Как видно из изложенного,
даже для относительно простой системы
запись формальной модели получается
весьма громоздкой. После приведения ее
к виду (3.6) решать систему обычным способом
становится сложно. С увеличением числа
входов и выходов задача еще более
усложняется.
(3.8)
Как видно из изложенного,
даже для относительно простой системы
запись формальной модели получается
весьма громоздкой. После приведения ее
к виду (3.6) решать систему обычным способом
становится сложно. С увеличением числа
входов и выходов задача еще более
усложняется.
Для получения более компактных и унифицированных форм представления моделей многомерных систем применяется матричная форма записи переменных и операторов преобразования.
Например, система (3.5) в матричной форме может быть представлена в виде
AY = ВХ, (3.9)
где X, Y-матрицы входных и выходных переменных; А, В - матрицы преобразований.
Система (3.6) принимает вид
Y = СХ. (3.10)
Под матрицами в данном случае понимается упорядоченная, т.е. выполненная по определенному правилу, табличная форма записи цифр, буквенных коэффициентов или передаточных функций и полиномов. Так, в (3.10) матрицы имеют вид

Главное преимущество матричной формы записи заключается в том, что, составляя матрицы по определенным правилам, можно трансформировать в матричную форму не только запись переменных, но и операции над ними.
Использование матричного представления объекта весьма эффективно при анализе и синтезе системы по динамическим показателям. Одним из наиболее современных методов анализа динамики многомерных систем является метод пространства состояний. Под переменными состояния и образуемым ими пространством состояний понимается совокупность величин, позволяющих по известным входным сигналам для t t0 определить выходные сигналы для t > t0.
В качестве переменных состояния могут приниматься как выходные переменные, так и их производные. Так, для одномерной системы, описываемой дифференциальным уравнением n-го порядка, переменными состояния будут значения у и (n - 1) производных в момент t = 0, позволяющие в дальнейшем при решении дифференциального уравнения классическим методом определить постоянные интегрирования.
В качестве примера идентификации многомерной системы рассмотрим испытательный стенд.
• Пример. Стенд, предназначенный для испытаний объемных гидроприводов, оборудован нагрузочным устройством Н в виде машины постоянного тока, связанной через генератор НГ и синхронный двигатель СД с сетью переменного тока для рекуперации энергии нагружения (рис. 3.2, а).
Нагрузочное устройство должно обеспечивать возможность задания нагрузок гидроприводу в широком диапазоне и поддержания их заданных значений. Изменение скорости гидродвигателя (гидромотора) ГМ осуществляется изменением производительности питающего гидронасоса ГН.
+
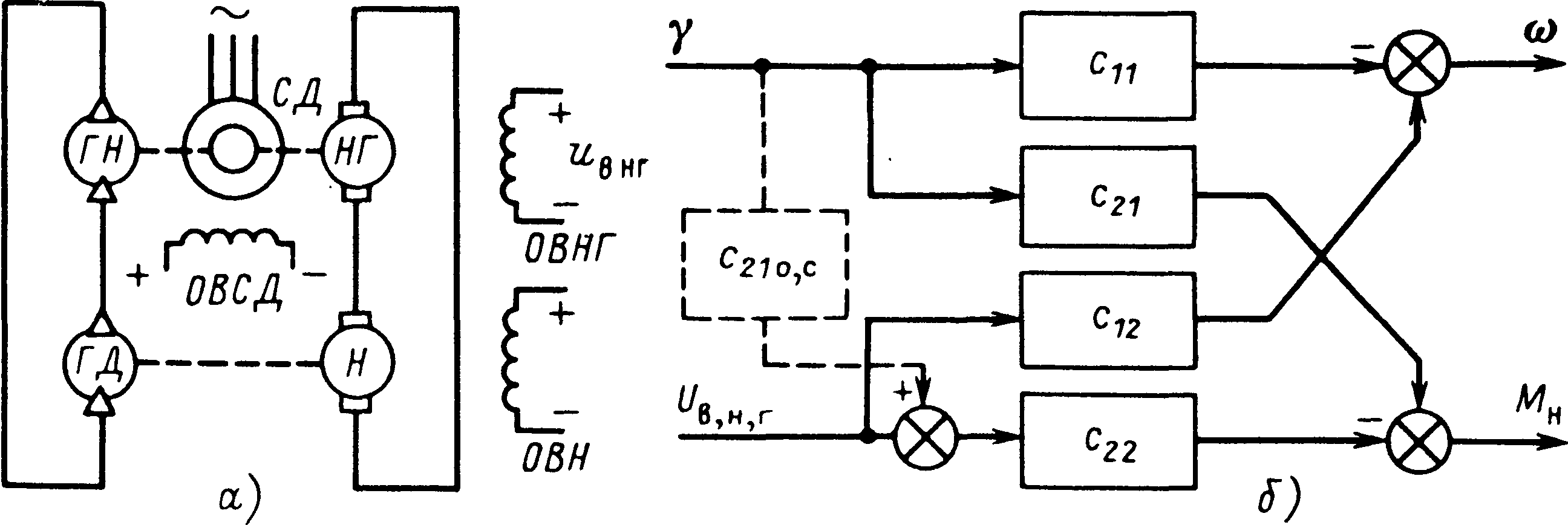
Рис.3.2. Стенд для испытания гидроприводов:
а — схема силового контура; б — эквивалентная структурная схема системы управления
Требуется синтезировать систему управления нагрузкой, инвариантную по угловой скорости.
Исходя из баланса расхода жидкости в контуре ГН → ГМ, уравнений электрического равновесия цепи НГ → Н и механического равновесия, можно записать уравнение системы в операторной форме:
![]() ;
;
![]() ;
;
![]()
где МГД, МН — операторные изображения моментов, развиваемых гидродвигателем и нагружателем; cj - изображение угловой скорости; ТГП,ТЯ — постоянная времени гидропривода, обусловленная сжимаемостью жидкости, и электромагнитная постоянная якорной цепи; су — коэффициент, определяющий утечку рабочей жидкости; qД — коэффициент пропорциональности между угловой скоростью и расходом жидкости гидродвигателя; kQ — коэффициент передачи гидронасоса, связывающий его производительность с углом наклона блока поршней 7 (входное управляющее воздействие); kН.Г - коэффициент передачи нагрузочного генератора; с - коэффициент двигателя нагружателя; JΣ, ΔМΣ — суммарный момент инерции и момент потерь на трение в силовом контуре стенда;
UВНГ- изображение напряжения возбуждения НГ.
Получена система уравнений трехсвязной системы с двумя управляющими входными воздействиями γ и UВНГ одним возмущающим ΔМΣ и тремя управляемыми МГД, МН и ω координатами. В ней можно обеспечить однозначное управление лишь двумя выходными переменными, в качестве которых принимаем МН и ω, а МГД определяем как зависящую от них. Исключив МГД и приняв ΔМΣ = 0, получим систему уравнений, описывающих стенд как двухканальную систему:
Су(ТГП р + 1)MН + (JΣ СуТГП р + 1)р + qm)ω = kQγγ
![]() (TЯр
+ 1)МН + сω = kНГUВНГ
(TЯр
+ 1)МН + сω = kНГUВНГ
или, введя сокращенные обозначения коэффициентов,
α11МН +α12ω = b1γ;
α21МН + α22ω = b2UВНГ;
Разрешив уравнения относительно ω и МН, получим
![]()
 ;
;
![]() ;
(3.11)
;
(3.11)
или в матричной форме




 ω
c11 c12
γ
ω
c11 c12
γ
 МН
= c21 c22
UВНГ
(3.12)
МН
= c21 c22
UВНГ
(3.12)
где cij, — передаточные функции для ω и МН по управляющим воздействиям.
Как видно из (3.11), как угловая скорость, так и момент нагрузки зависят от двух управляющих воздействий (рис. 4.1, б). Зависимость ω от γ отражает действие на угловую скорость изменения угла наклона блока поршней гидронасоса, а зависимость от UВНГ— действия на ω момента нагрузки на валу гидромотора.
Во втором уравнении зависимость момента МН от своего задания UВНГ необходима, а зависимость его от либо вообще должна быть устранена, либо должна формироваться как функция ω по соответствующему закону. Так как при испытаниях гидропривода нужна имитация нагрузки, не зависящей от скорости(система инвариантная по скорости), то следует автономизировать канал управления нагрузкой. В управляющее воздействие этого канала введем сигнал, компенсирующий составляющую с21 γ (рис. 3.1, б, штриховые линии), т.е.
с21γ - с22(Uвнг + с21ос γ) = МН
где с21ос - передаточная функция обратной связи, компенсирующей естественное действие γ на МН. Тогда
МН = (с21 - с22с21ос)γ + с22UВНГ
Чтобы исключить влияние γ полагаем коэффициент при этой координате равным нулю, откуда
с21ос = с21/ с22
Раскрывая значение с21 и с22, получаем
![]() (3.13.)
(3.13.)
и, обозначая
![]() ;
;
![]()
окончательно имеем
![]() (3.14)
(3.14)
Следовательно, для автономизации канала управления нагрузкой, т.е. независимости нагрузки от задания по скорости, надо на его вход подать сигнал задания γ через звено второго порядка с параметрами KОС, ТГП, ТОС.