

Описание объекта обработки
Объектом обработки является «корпус». Точное назначение данной детали не известно, но можно предположить, что деталь является корпусной частью какого-то прибора. Цилиндрическая форма детали, показывает, что возможно в корпусе устанавливается подшипниковый узел и вращательное движение совершает либо сам корпус, либо его внутренняя часть.
Технологический процесс автоматизированной обработки и его описание
Маршрутный технологический процесс обработки детали «Корпус»
005 – Заготовительная
010 – Токарная
015 – Сверлильная
020 – Сверлильная
025 – Шлифовальная
030 – Гальваническая
035 – Моечная
040 – Контрольная
Для проектирования РТК была выбрана операция 015 – Сверлильная.
Содержание операции 015 – Сверлильная:
Установить и закрепить заготовку, после обработки снять;
Просверлить 4 отверстия под резьбу М4, согласно чертежу детали;
Нарезать резьбу М4 в 4 отверстиях, согласно чертежу детали;
Снять фаски в 4 отверстиях 1×45º
Время обработки одной детали на операции Тшт=2,57 мин.
4. Описание компоновки ртк с обоснованием его структуры и выбора входящих в него элементов
Данный роботизированный технологический комплекс (РТК) создан для сверлильной обработки детали «корпус». РТК создан на базе сверлильно-фрезерно-расточного вертикального многооперационного станка с ЧПУ мод. 243ВМФ2 и промышленного робота РПД – 1,25. Станок и промышленный робот расположены так, чтобы подход к станку и промышленному роботу для ремонта и тех. обслуживания был максимально свободным.
Станок выбираем исходя из его технических и технологических возможностей выполнения данной операции, при максимальной рациональности его использования.
Промышленный робот выбираем исходя из требований грузоподъемности и необходимой зоны обработки. Для данной операции наиболее подойдет робот, который имеет две руки, что позволяет существенно сократить время цикла обработки деталей на данной операции.
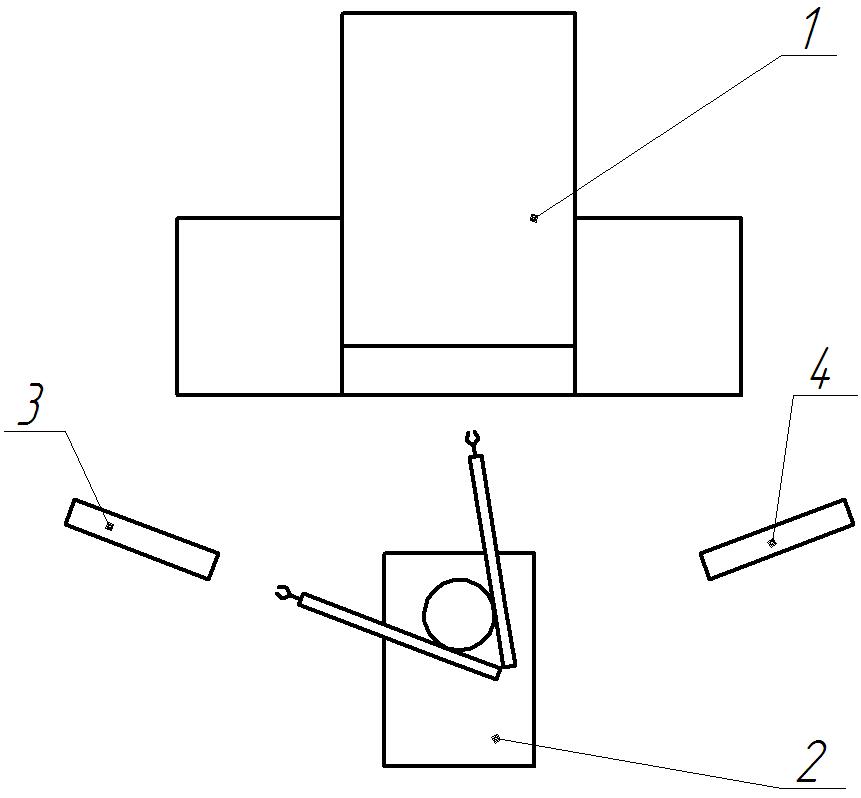
Рисунок 1 – Схема РТК
1-станок мод. 243ВМФ2, 2-промышленный робот мод. РПД – 1,25, 3-загрузочное устройство в виде лотка-ската, 4- разгрузочное устройство в виде лотка ската.
Выбираем сверлильно-фрезерно-расточной вертикальный многооперационный станке с ЧПУ мод. 243ВМФ2.
Технические характеристики станка мод. 243ВМФ2
Размеры рабочей поверхности стола (длина×ширина), мм……………560×320
Наибольшее перемещение, мм
продольное………………………………………………………………400
поперечное………………………………………………………………250
Расстояние от торца шпинделя до поверхности стола, мм…………….125-500
Количество Т-образных пазов…………………………………………………..5
Ширина Т-образных пазов, мм…………………………………………………12
Расстояние между Т-образными пазами, мм…………………………………..63
Цена единицы отсчета стола, мм……………………………………………0,002
Наибольшее перемещение, мм
гильзы шпинделя………………………………………………………...140
шпиндельной головки…………………………………………………...235
Расстояние от оси шпинделя до стойки, мм………………………………….360
Количество скоростей шпинделя……………………………………………….18
Число оборотов шпинделя в минуту……………………………………..18-2500
Количество рабочих подач……………………………………………………...30
Рабочие подачи стола, мм/мин…………………………………………...30-3000
Наибольший диаметр сверления, мм………………………………………….25
Наибольшая масса обрабатываемого изделия, кг……………………………150
Общая наибольшая мощность всех электродвигателей, кВт……………….4,08
Габарит станка (длина×ширина×высота), мм…………………1760×1625×2660
Масса станка (без принадлежностей), кг……………………………………3550
Необходимая грузоподъемность робота
 (кг)
(кг)
Исходя из вышеперечисленных требований выбираем промышленный робот мод. РПД – 1,25

Рисунок 2 – Общий вид промышленного робота мод. РПД – 1,25
Техническая характеристика промышленного робота мод. РПД-1,25
Грузоподъёмность, кг ……………………………………………………………1,25
Грузоподъемность одной руки…………………………………………………..0,63
Число рук……………………………………………………………………..............2
Система координат…………………………………………...........Цилиндрическая
Число степеней подвижности ……………………………………...……………….4
Из них программируемых…………………………………………...………..4
Число координат по которым возможно одновременное перемещение………....3
Погрешность позиционирования рабочего органа, мм ……………………….±0,1
Горизонтальное перемещение руки:
ход, мм………………………………………………………………………500
скорость, мм/с……………………………………………………………..1500
Вертикальное перемещение руки:
ход, мм………………………………………………………………………125
скорость, мм/с………………………………………………………………500
Поворот одной или обеих рук относительно вертикальной оси:
угол, град……………………………………………………………………180
скорость, град/с……………………………………………………………..180
Вращение схвата:
угол, град……………………………………………………………............180
скорость, град/с……………………………………………………………..180
Давление воздуха в пневмосети, МПа………………………………...Не менее 0,4
Показатели надежности:
допустимое время работы, час……………………………………...………16
наработка на отказ, час………………………………………………….…600
средний срок службы, лет…………………………………………………....5
Габариты робота, мм……………………………………………….…1070×630×840
Масса робота, кг…………………………………………………………………..600