

ПРИЛОЖЕНИЕ 1
Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
ГОУ ВПО Череповецкий государственный университет
Институт информационных технологий
Кафедра Программное обеспечение ЭВМ
УТВЕРЖДАЮ
Зав. кафедрой ПО ЭВМ,
к. т.н., профессор __________ Ершов Е.В.
«___» _____________ 200_ г.
Разработка программного обеспечения адаптивной системы управления исскуственного кровообращения при нестабильности параметров полимерной магистрали
Техническое задание на дипломную работу
Листов: 13
Руководитель Полянский А.В.
Исполнитель,
студент гр. 1ПО-51: Эйсмонт Д.В.
2008 г.
ВВЕДЕНИЕ
Системы искусственного кровообращения – очень важная составляющая современных систем жизнеобеспечения человека. Благодаря им существует возможность проведения сложнейших операций, связанных с временным выделением из общего круга кровообращения как отдельных органов человека, так и всего организма. Несмотря на то, что такие системы существуют и успешно используются в медицине, до сих пор ведутся исследования по их дальнейшему совершенствованию. В частности, большая часть существующих систем являются разомкнутыми, в то время, как более перспективными, гибкими и полезными являются системы адаптивные, исследования по предмету создания которых до сих пор проводятся. Данная работа призвана стать частью такого исследования.
1. Основание для разработки
Основанием для разработки является задание, выданное кафедрой Программного обеспечения ЭВМ института информационных технологий Череповецкого государственного университета.
2. Назначение разработки
Данная разработка предназначена для автоматизации работы стенда, моделирующего адаптивную систему искусственного кровообращения. Основным элементом этого стенда, подлежащего исследованиям, является гибкая полимерная магистраль с перемещаемой внутри при помощи насоса жидкостью. В задачу любой системы искусственного кровообращения входит создание в организме человека импульса крови (при моделировании – рабочей жидкости) нужного вида – соответствующего в реальных случаях импульсу, создаваемому естественным сердцем человека. В случае адаптивной системы эта задача сводится к подстройке рабочего импульса жидкости к некоторому заданному (эталонному) импульсу. Основная задача исследований – построить такую систему, в которой процесс адаптации будет производиться при любых параметрах этой магистрали и рабочей жидкости при помощи специального корректирующего алгоритма, реализуемого программно на ЭВМ. Разрабатываемое программное обеспечение призвано решить эту задачу, а также облегчить работу по проведению и систематизации результатов исследований.
3. Требования к программе
3.1. Требования к функциональным характеристикам
Разрабатываемое программное обеспечение должно удовлетворять следующим функциональным требованиям:
Возможность настройки характеристик элементов системы. Значение всех характеристик каждого элемента должно храниться в файлах внешней памяти.
Задание и настройка эталонного импульса. Эталонный импульс представляет ключевые входные данные, необходимые для функционирования адаптивной системы управления. Он представляет собой функцию давления жидкости от времени и определяется множеством точек некоторого фиксированного размера. Функциональная зависимость должна устанавливаться на основе указанных точек с помощью любого подходящего метода интерполяции.
Должны быть предусмотрены два основных режима работы:
- режим работы со стендом или реальный режим – основной режим, при котором производится реальное взаимодействие с аппаратурой замкнутой системы управления импульсом. Взаимодействие со стендовой аппаратурой должно производиться посредством микроконтроллера, содержащим необходимое программно-аппаратное обеспечение для непосредственной работы со стендом. В данном режиме необходимо:
- обеспечивать подачу сигнала контроллеру к началу работы со стендом и всю служебную информацию, связанную с начальными характеристиками работы электрического двигателя, необходимую для корректного начала работы;
- производить приём информации об импульсе жидкости от контроллера через фиксированные интервалы времени для получения картины реального импульса и его дальнейшего анализа;
- На основе результатов выполнения специального корректирующего алгоритма, на вход которого подаются реальный и эталонный импульсы, необходимо сформировать решение об изменении параметров работы двигателя насоса для изменения реального импульса в целях его приближения к реальному;
- Производить передачу информации об изменении параметров работы стенда на контроллер;
- Взаимодействие между персональным компьютером и контроллером должно производиться посредством интерфейса RS-232.
- Режим эмуляции или демонстрационный режим, в котором рассматривается математическая модель замкнутой системы управления импульсом рабочей жидкости и демонстрируется работа корректирующего алгоритма системы как средства приведения некоторого рабочего импульса к заданному эталонному.
4. Визуализация работы должна состоять из двух частей:
- анимированное вращение насоса, как можно более приближенное к реальному. Линейные параметры визуализации должны соответствовать реальным значениям параметров стендового оборудования;
- рисование графиков двух типов: рабочего и эталонного. Оба графика должны прорисовываться одновременно в одной и той же системе координат (СК). Кроме того, должен быть предусмотрен вывод в отдельной СК дополнительных графиков, представляющих динамику изменения важных параметров корректирующего алгоритма. Подборка параметров, графики которых подлежат выводу, должна быть согласована с заказчиком в отдельном порядке после проведения исследований по созданию этого алгоритма. Должна быть предусмотрена возможность масштабирования всех графиков с возможностью изменения масштаба, как до начала работы, так и в ходе неё.
Должна быть предусмотрена возможность изменения используемой для визуализации цветовой схемы в зависимости от пожеланий пользователя.
5. Должна быть реализована возможность протоколирования результатов работы системы управления посредством записи этих данных в файлы внешней памяти.
Основные входные данные:
1. Эталонный импульс, представленный в виде последовательности точек фиксированного размера. В данном случае точка есть пара время-давление. Точки берутся через некоторые фиксированные интервалы времени. Количество точек может быть фиксировано и выбрано разработчиком в числе от 10 до 30. Должно быть предусмотрено два возможных способа ввода данных импульса:
- ручной ввод числовых значений ординат вершин для каждой точки с клавиатуры;
- построение графика импульса с помощью мыши.
При работе программы в любом из режимов на основе точек талонного импульса должна быть получена функциональная зависимость при помощи любого подходящего метода интерполяции функций. Таким образом, эталонный импульс должен быть периодической функцией давления от времени Pz(t), построенной по отдельным точкам временной шкалы, характеризующейся своим периодом.
2. Полученный импульс с датчиков стенда также в виде последовательности точек, снятых через фиксированные интервалы времени. Интервалы времени выбираются в зависимости от требований используемого корректирующего алгоритма. Период экспериментального импульса совпадает с периодом эталонного. В идеале в ходе процесса адаптации экспериментальный импульс должен приближаться к эталонному.
3. Параметры исследуемой полимерной магистрали и всех прочих значимых элементов стенда. Под этими элементами следует понимать следующие сущности:
- перфузионный насос, основные значимые характеристики: кол-во роликов, линейные размеры;
- пластиковая магистраль, основные значимые характеристики: материал, длина магистрали, диаметр, жесткость материала;
- электрический двигатель насоса, достаточно текстового описания;
- контроллер стенда, достаточно текстового описания.
Наряду с вышеперечисленными, должна быть введена сущность для настройки параметров вывода графиков. Для неё должны быть введены следующие характеристики для каждой из двух СК: основной (эталонный и экспериментальный графики) и дополнительной:
- масштаб по оси абсцисс;
- масштаб по оси ординат;
- цена деления по оси абсцисс;
- цена деления по оси ординат.
Должна быть возможность ввода этих параметров с клавиатуры перед началом работы и обеспечено их хранение в файлах внешней памяти.
Кроме того, отдельно должна быть вынесена настройка дополнительных параметров, необходимых для работы корректирующего алгоритма, прежде всего:
- период эталонного импульса;
- количество шагов дискретизации экспериментального импульса – соответствует количеству расчётов по корректирующему алгоритму для каждого импульса.
Остальные параметры корректирующего алгоритма, подлежащие настройке, должны быть согласованы с заказчиком после проведения дополнительных исследований по созданию этого алгоритма.
Для каждой сущности должна быть поддержка хранения во внешней памяти нескольких её экземпляров, параметры каждого из которых могут быть изменены пользователем. Один из этих экземпляров должен быть помечен как используемый в системе в её текущем состоянии.
4. Параметры визуализации и параметры цветовой схемы. Под параметрами визуализации следует понимать свойства анимированного изображения насоса. Это тройка следующих параметров:
- абсцисса центра насоса в пикселах;
- ордината центра насоса в пикселах;
- масштаб этого отображения.
Параметры цветовой схемы подлежат настройке для того, чтобы каждый пользователь мог иметь возможность изменить цвета отдельных элементов анимированного изображения насоса и каждого из выводимых на экран графиков. Для анимации необходима опция выбора цвета для трёх следующих компонентов:
- цвет роликов насоса;
- цвет крепёжных механизмов роликов;
- цвет магистрали.
Должна быть возможность ввода этих параметров с клавиатуры перед началом работы и обеспечено их хранение в файлах внешней памяти.
Выходные данные:
1. Сигнал на контроллер стенда к началу работы, сопровождаемый параметрами работы системы. Подразумевается передача некоторого фиксированного числового значения, воспринимаемого программным обеспечением контроллера как сигнала к старту. Имеет место только в режиме работы со стендом.
2. Сигнал на контроллер стенда об изменении режима работы (скорости вращения насоса) в целях изменения рабочего импульса. Представляет собой числовое значение, полученное на выходе корректирующего алгоритма и представляющее собой желаемое значение экспериментального импульса на выходе магистрали, подлежащее обработке программным обеспечением контроллера. Имеет место только в режиме работы со стендом.
3. Визуальное представление графиков. Это два основных графика: эталонного и экспериментального импульсов и дополнительные графики параметров корректирующего алгоритма. Графики выводятся в обоих режимах работы и выводятся по точкам в реальном времени в некоторой системе координат. Графики импульсов и дополнительные графики выводятся на двух разных координатных плоскостях.
4. Анимированное изображение насоса – вращающееся изображение роликового перфузионного насоса, передавливающего пластиковую магистраль, максимально близкое к реальному. Все линейные характеристики должны быть пропорциональны значениям, вводимым пользователем на основе реальных.
5. Протокол работы системы, подлежащий записи в файл внешней памяти. Этот протокол должен состоять из следующих данных:
- «шапка», включающая данные о времени начала работы САУ, а также используемых элементов системы;
- данные работы системы в виде пар числовых значений: значение эталонного импульса в текущей точке – значение экспериментального импульса в этой же точке.
Требования к максимальному объёму используемой памяти не предъявляются. Вся работа системы (при условии реальной работы со стендом) должна происходить в режиме реального времени, чтобы не «отстать» от физических процессов стенда.
3.2 Требования к надёжности
Предъявляются следующие требования:
1. Программа должна корректно блокировать свою работу при вводе заведомо некорректных данных для корректной работы с физическим устройством.
2. Программа должна корректно блокировать свою работу в случае неполадок физических устройств.
3.3 Информационная и программная совместимость
Программа должна выполняться на IBM PC – совместимых компьютерах.
Разработку программного продукта требуется производить с помощью системы визуального программирования Borland C++ Builder версии 6. Для функционирования данной программы необходима любая из операционных систем семейства Win32.
Программа предназначена для совместной работы с техническими средствами лаборатории «Стохастические информационно-управляющие системы» НИИ ЧГУ. Для функционирования программы в режиме работы со стендом требуется наличие аппаратуры для моделирования системы искусственного кровообращения (рис. П1.1), который состоит из следующих основных элементов:
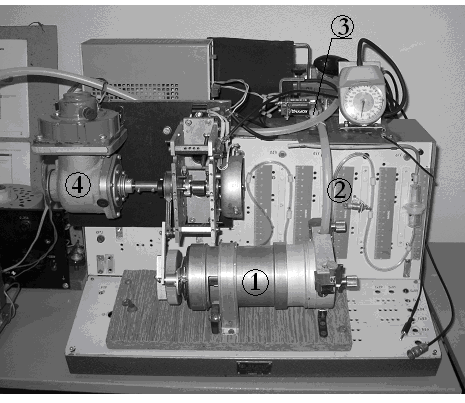
Рис. П1.1. Стенд для моделирования системы искусственного кровообращения
1. Перфузионный насос, предназначенный для движения рабочей жидкости (сходной по свойствам с кровью человека) по пластиковой магистрали.
2. Пластиковая магистраль.
3. Фотодатчики, установленные на свободном конце магистрали, предназначенные для съёма импульса рабочей жидкости.
4. Электрический двигатель, тяга которого управляется контроллером, соединённый приводом с насосом.
5. Контроллер (отсутствует на схеме), соединённый с двигателем и с фотодатчиками с установленным программным обеспечением для управления тягой двигателя и захвата информации с датчиков. Контроллер должен быть соединён с ЭВМ, на котором будет производиться работа разрабатываемого ПО через интерфейс RS-232 (последовательный порт, COM) и готовый к обмену информации с персональной ЭВМ через этот интерфейс.
Структурная схема системы управления на основе стенда показана на рис. П1.2.

Рис. П1.2 Структурная схема системы управления
В случае работы в режиме эмуляции требования к составу и параметрам технических средств не предъявляются.
Требования маркировке, упаковке и транспортировке не предъявляются.