

2.4 Дослідження стійкості, статичних і динамічних характеристик аср. Настроювання регулятора на задані показники якості процесу регулювання
Величина перерегулювання залежить від виду сигналу, що відпрацьовується. При відпрацьовуванні східчастого впливу по сигналі завдання величина перерегулювання визначається по формулі
![]() (9)
(9)
де значення величин Xm і Xy показані на рисунку 7
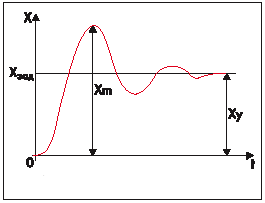
Рисунок 7. Графік перехідного процесу.
При відпрацьовуванні впливу, що обурює, величина перерегулювання визначається по формулі
![]() (10)
(10)
де значення величин X m і X y показані на рисунку 8.

Рисунок 8 - Графік перехідного процесу
Час регулювання — це час, за яке регульована величина в перехідному процесі починає відрізнятися від сталого значення менш, ніж на заздалегідь задане значення b , де b — точність регулювання. Настроювання регулятора вибираються так, щоб забезпечити або мінімально можливе значення загального часу регулювання, або мінімальне значення першої напівхвилі перехідного процесу.
У деяких системах АР спостерігається помилка, що не зникає навіть після закінчення тривалого інтервалу часу — це статична помилка регулювання —e с. У регуляторів з інтегральної тридцятимільйонної помилки в сталому стані теоретично дорівнюють нулю, але практично незначні помилки можуть існувати через наявність зон нечутливості в елементах системи. Показник колебательности M характеризує величину максимуму модуля частотної передатної функції замкнутої системи (на частоті резонансу) і, тим самим, характеризує коливальні властивості системи. При настроюванні регуляторів можна одержати досить велику кількість перехідних процесів, що задовольняють заданим вимогам. Таким чином, з'являється деяка невизначеність у виборі конкретних значень параметрів настроювання регулятора. З метою ліквідації цієї невизначеності й полегшення розрахунку настроювань уводиться поняття оптимальних типових процесів регулювання. Показники якості процесів регулювання визначаються по характеристиці перехідного процесу й статичній характеристиці АСР.
1)
за
наявним значенням величин
Та, Т,
,
Тс,
,
![]() ;
визначаємо
значення постійних коефіцієнтів
;
визначаємо
значення постійних коефіцієнтів
![]() рівняння (8);
рівняння (8);
2) змінюючи значення коефіцієнта від 0,08 до 0,02 регулятора, одержуємо коефіцієнти рівняння (8), які представлені в таблиці 2. Вирішуючи рівняння (8) одержуємо сімейство перехідних процесів, що представлено на малюнку 9. Значення в інтервалі 0 . . 0,1 приймаються 0,02; 0.04; 0,06; 0,08; 0.1. Тому що звичайно досить побудувати 5 перехідних процесів для побудови характеристик залежності показників якості перехідного процесу від .
Таблиця 2
|
|
|
|


Рисунок 9 - Графіки перехідних процесів при зміна
 По графіках перехідних процесів
визначаємо,
що мінімальний час регулювання
По графіках перехідних процесів
визначаємо,
що мінімальний час регулювання
![]() =30
с. у
процесі з
=0,08
і
=30
с. у
процесі з
=0,08
і
![]() =16,7%,
що не перевищує гранично припустимі в
завданні 40%.
=16,7%,
що не перевищує гранично припустимі в
завданні 40%.
3)
при
знайденому значенні
![]() будуємо ще два перехідних процеси із
Тс=5з
і Тс=15з
і остаточно вибираємо значення
й Тс
при яких буде мінімальним
і
<40%;
будуємо ще два перехідних процеси із
Тс=5з
і Тс=15з
і остаточно вибираємо значення
й Тс
при яких буде мінімальним
і
<40%;
 Рисунок
10 - Графіки
перехідних процесів при зміні Тс
Рисунок
10 - Графіки
перехідних процесів при зміні Тс
Графіки перехідних процесів малюнок 10, побудовані за результатами розрахунків з =0,08 і Тс=5; 10 і 15 с. По цих графіках знаходимо мінімальний час регулювання =30 з, при =16.7%, що задовольняє завданню. У такий спосіб регулятор потрібно настроїти на =0,08 (Кр=12,5) і Т=5 с.
4)
по отриманій характеристиці перехідного
процесу визначаємо
показники його якості, динамічну помилку
,
(у нашім випадку розраховується по
(10)),
колебательность
![]() ,
час
перехідного процесу (або час регулювання)
,
т.е
час від момент нанесення збурювання
до моменту коли значення
в перехідному
процесі не буде виходити за межі зони
нечутливості
,
час
перехідного процесу (або час регулювання)
,
т.е
час від момент нанесення збурювання
до моменту коли значення
в перехідному
процесі не буде виходити за межі зони
нечутливості
![]() .
У
таблиці
3 зведений розрахунок показників якості
перехідних процесів, зображених
на рисунках 9,10.
.
У
таблиці
3 зведений розрахунок показників якості
перехідних процесів, зображених
на рисунках 9,10.
Таблиця 3.
|
|
|
|
|
10 |
5 |
42 |
19 |
1 |
12.5 |
5 |
30 |
16.7 |
1 |
16.6 |
5 |
40 |
30 |
1.5 |
25 |
5 |
32 |
46 |
2 |
50 |
5 |
53 |
74 |
4.5 |
12.5 |
10 |
50 |
26.7 |
1 |
12.5 |
15 |
50 |
26.7 |
1 |
5)
дорівнявши
всі похідні рівняння (8) до нуля, одержуємо
рівняння статичної характеристики АСР
і при
обраних
значеннях
і Тс
побудуємо статичну характеристику.
Дорівнявши
до нуля похідні рівняння динаміки АСР
(8), одержимо рівняння його статики:
![]() або
або
![]()
Для настроювання регулятора на =0,08 значення
![]() =-8.152*10^-4
=-8.152*10^-4
![]() =0,014
=0,014
![]()
![]()
![]()
![]()
Оскільки статична характеристика (малюнок 11) є прямій, то для її побудови досить двох крапок: H при =0 і Н =1


Рисунок 11 - Статична характеристика АСР
Розділ 3 Короткий опис пристрою й робота регулятора
Одним з розповсюджених типів суднових регуляторів рівня води в барабані парогенератора є пропорційні регулятори з компенсацією збурювання по паровому навантаженню. Схема двох імпульсного регулятора рівня в барабані з мембранним чутливим елементом і підсилювальним двухпроточным гідравлічним регулчтором.
Важливим параметром суднової паросилової установки є тиск у магістралі пари, що відпрацювала , приймаюча пара від турбін допоміжних механізмів і звичайно подає його на підігрів живильної води у водоподогревателе або деаераторі й у систему ущільнення головних турбін. Надлишки пари, що відробило, виникаючі на окремих режимах роботи установки, стравлюються з магістралі пари, що відробило, у головний конденсатор. Якщо тиск у магістралі пари, що відробило, буде за якимись причинами коливатися, відхиляючись від заданого значення, то це приведе до розладу роботи елементів установки, пов'язаних з даною магістраллю: зміниться потужність допоміжних механізмів через зміну перепаду тепла, срабатываемого в їхніх турбінах, упаде вакуум у головному конденсаторі через коливання тиску в системі ущільнення турбін, підвищиться киць-лородосодержание живильної води в результаті зміни тиску в деаераторі (в установках з деаераторами). Крім того, коливання тиску пари, що відробило, порушуючи режим регенерації тепла, викликають зменшення к. п. буд. теплового циклу установки. Зі сказаного ясно, що тиск у магістралі пари, що відробило, необхідно підтримувати цілком певним, не допускаючи його значних відхилень від необхідного значення.
Крім магістралі пари, що відробило, часто потрібно підтримувати певні тиски в інших парових магістралях: магістралях слабоперегретого й насиченої пари різних тисків. Наприклад, частина допоміжних механізмів може працювати на парі знижених параметрів, у зв'язку із чим з'являється необхідність одержати пару знижених параметрів, а потім підтримувати ці параметри постійними.
Регулювання тисків у парових магістралях здійснюється, як правило, регуляторами непрямої дії без зворотних зв'язків. Ці регулятори крім високої статичної точності забезпечують гарна якість перехідних процесів завдяки малим постійним часу й більших коефіцієнтів саморегулювання парових магістралей як об'єктів регулювання. У деяких випадках застосовують регулятори тиску прямої дії. Регулювальними органами служать дросельні або пропускні клапани, що повідомляють магістраль, у якій регулюється тиск, з магістраллю іншого тиску. Для запобігання парових магістралей від ушкоджень при підвищенні в них тиску передбачають запобіжні клапани.
Як приклад регулювання тисків у парових магістралях розглянемо принципову схему системи автоматичного регулювання тисків у магістралях що відробила й насиченої пари для установки з деаератором.
Регулятори тисків що відробив і насиченої пари вимірюють регульовані тиски за допомогою сильфонів . Підсилювальними елементами регуляторів служать водоструминні реле , виконавчими-поршневі сервомотори .
Регулятор тиску пари, що відробило, при відхиленні регульованого тиску від установленого значення (1 кгс/див2) откры-паст один із двох регулювальних клапанів , стравлюючи пара з магістралі пари, що відробила, у головний конденсатор або додаючи в неї пара з магістралі насиченої пари.
Регулятор тиску насиченої пари управляє відкриттям, регулювального клапана, що повідомляє магістралі перегрітого w насиченої пари. Для запобігання магістралі насиченого» мара від ушкодження у випадку підвищення в ній тиску перед регулювальним клапаном у магістралі перегрітої пари встановлений захисно-запобіжний клапан. При нормальному тиску в магістралі насиченої пари (2,5 МПа) захисно-запобіжний клапан є звичайним прохідним клапаном, що перебуває у відкритому стані під дією неврівноважених зусиль від тиску пари й натягу пружини. Якщо в магістралі насиченої пари тиск підвищується понад установлений, відкривається імпульсний клапан, повідомляючи верхню порожнину захисно-запобіжного клапана із системою продування низького тиску. При цьому тиск у верхній порожнині захисно-запобіжного клапана падає, клапан відкривається.
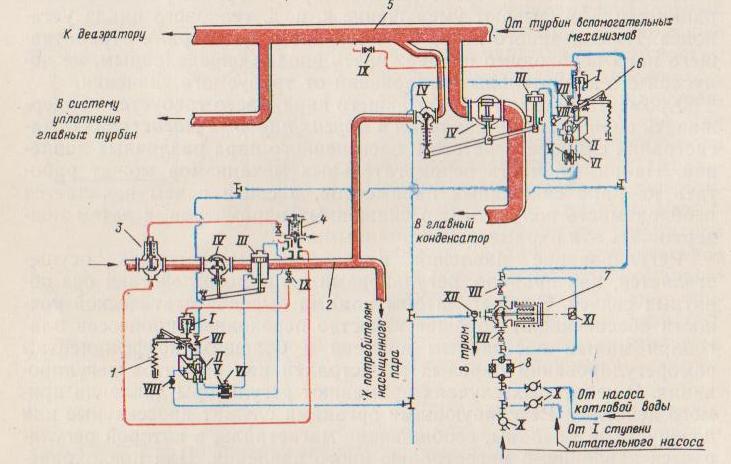
Рисунок 3 - Принципова схема систем регулювання тисків у магістралях що відробила й насиченої пари
1 — регулятор тиску насиченої пари; 2 — трубопровід насиченої пари; 3 -захисно-запобіжний клапан; 4 — імпульсний клапан; 5 — трубопровід пари, що відробило; 6 - регулятор тиску пари, що відробило; 7 - пристрій, щоредукує; 8 — здвоєний фільтр. І — сильфон; ІІ -водяне підсилювальне реле; III — сервомотор; IV — регулювальний клапан; V — обхідний кран; VI — дросельний клапан; VII — прохідний клапан; VIII — прохідний кран; IX — прохідний кран; X — неповоротно-запірний клапан; .XІ— дросельний (голчастий) клапан; XII — трехходовий клапан
В одному із силових трубопроводів, що з'єднують прийомні сопла підсилювального реле із сервомотором кожного регулятора, установлені дросельні клапани VI, призначені для настроювання швидкостей рухи поршнів сервомоторів. Обхідні крани V служать для з'єднання порожнин сервомоторів при переході на ручне регулювання. Здвоєний фільтр і пристрій, що редукує, призначені для очищення робочої води, що забирається з живильної системи, і зниження її тиску, до 0,6-0,8 МПа