

2.1 Обґрунтування закону регулювання, складання принципової, структурної й функціональної схеми аср
Завдання вибору закону керування й типу регулятора полягає в наступному - необхідно вибрати такий тип регулятора, що при мінімальній вартості й максимальній надійності забезпечував би задану якість регулювання. Можуть бути обрані релейні, безперервні або дискретні (цифрові) типи регуляторів.
Для того, щоб вибрати тип регулятора й визначити його настроювання необхідно знати:
- статичні й динамічні характеристики об'єкта керування;
- вимоги до якості процесу регулювання;
- показники якості регулювання для безперервних регуляторів;
- характер збурювань, що діють на процес регулювання.
Вибір типу регулятора звичайно починається з найпростіших дітовбивць регуляторів і може закінчуватися самонастроювальними мікропроцесорними регуляторами. Для кожного об'єкта керування необхідно застосовувати регулятори з відповідним алгоритмом і законом регулювання. Це дозволяє істотно знизити втрати при функціонуванні об'єкта (витрата енергії, втрати продукції та ін.).
а) П-Закон регулювання
Найбільша швидкодія забезпечує П-Закон керування, - виходячи зі співвідношення tP / τd. Однак, якщо коефіцієнт підсилення П-Регулятора Кр малий (найчастіше це спостерігається в системах із запізнюванням), те такий регулятор не забезпечує високої точності регулювання, тому що в цьому випадку велика величина статичної помилки.
Якщо Кр ≥ 10, те П-Регулятор прийнятний, а якщо Якщо Кр < 10, то потрібне введення в закон керування інтегральноїої тридцятилітньому.
б) ПИ-закон регулювання
Найпоширенішим на практиці є Пі-регулятор, що має наступні достоїнства:
- забезпечує нульову статичну помилку регулювання;
- досить простий у настроюванні, тому що настроюються тільки два параметри, а саме коефіцієнт підсилення Кр і постійна часу інтегрування Ti. У такому регуляторі є можливість оптимізації величини відносини Кр/Тi→min, що забезпечує керування з мінімально можливою середньоквадратичною помилкою регулювання;
- мала чутливість до шумів у каналі виміру (на відміну від Пид-Регулятора).
в) ПИД-Закон регулювання
Для найбільш відповідальних контурів регулювання можна рекомендувати використання ПИД-Регулятора, що забезпечує найбільш висока швидкодія в системі.
Однак варто враховувати, що ця умова виконується тільки при його оптимальних настроюваннях (настроюються три параметри).
Зі збільшенням запізнювання в системі різко зростають негативні фазові зрушення, що знижує ефект дії диференціальноїої тридцятилітньому регулятора. Тому якість роботи Пид-Регулятора для систем з більшим запізнюванням стає порівнянно з якістю роботи Пі-регулятора.
Крім цього, наявність шумів у каналі виміру в системі з Пид-Регулятором приводить до значних випадкових коливань керуючого сигналу регулятора, що збільшує дисперсію помилки регулювання й зношування виконавчого механізму.
Таким чином, ПИДРегулятор варто вибирати для систем регулювання, з відносно малим рівнем шумів і величиною запізнювання в об'єкті керування. Прикладами таких систем є системи регулювання температури.
ПИД-Регулятори дозволяють для об'єктів постійної часу обьекта (инерционностью) Т и с малим транспортним запізнюванням τd<0,2T забезпечити гарна якість регулювання: неузгодженість регулювання E < 1% (від заданої крапки), достатній малий час виходу на режим і невисоку чутливість до зовнішніх збурювань. Іноді (у деяких об'єктах регулювання з істотним транспортним запізнюванням), при τd>0,2T ПИД-Регулятор має погану якість регулювання. У цьому випадку гарні якісні показники забезпечують системи керування з моделлю об'єкта.
Варто мати на увазі, що при неточному завданні коефіцієнтів настроювання ПИД-Регулятор може мати гірші показники, чим дітовбивця регулятор і навіть перейти в режим автоколебаний. Для типових П-П-, ПИ-, ПИД регуляторів відомі найпростіші аналітичні й табличні методи настроювання (наприклад методики Циглера-Никольса).
Відповідно до завдання прийнятий гідравлічний пропорційний регулятор непрямої дії.
Структурна й функціональна схеми прийнятого регулятора представлені на рисунку 6.

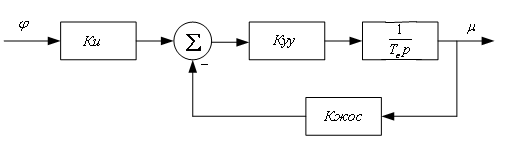
Рисунок 6 - Структурна й функціональна схеми регулятора.
ИУ й УУ - відповідно вимірювальний і підсилювальний пристрої;
ЭС - елемент порівняння;
ЇМ - виконавчий механізм;
ЖОС – жорсткий зворотний зв'язок
![]()
![]() ,
,
де:
![]() і
і
![]() відповідно поточна й максимальна
величина переміщення поршня виконавчого
механізму й максимальна величина
переміщення поршня виконавчого механізму,
мм
відповідно поточна й максимальна
величина переміщення поршня виконавчого
механізму й максимальна величина
переміщення поршня виконавчого механізму,
мм