

2.2 Розробка схеми виділення зубців і інтервалів
Для виконання вимірів параметрів зубців, інтервалів і сегментів ЕКГ необхідно виконати їхнє автоматизоване виділення. Цю задачу можна вирішити, використовуючи схеми порівняння напруг в аналоговій формі, рис. 2.3. Вибравши граничні напруги Unl, Un2. формують прямокутні імпульси, тривалості яких близькі до тривалості зубців ЕКГ.
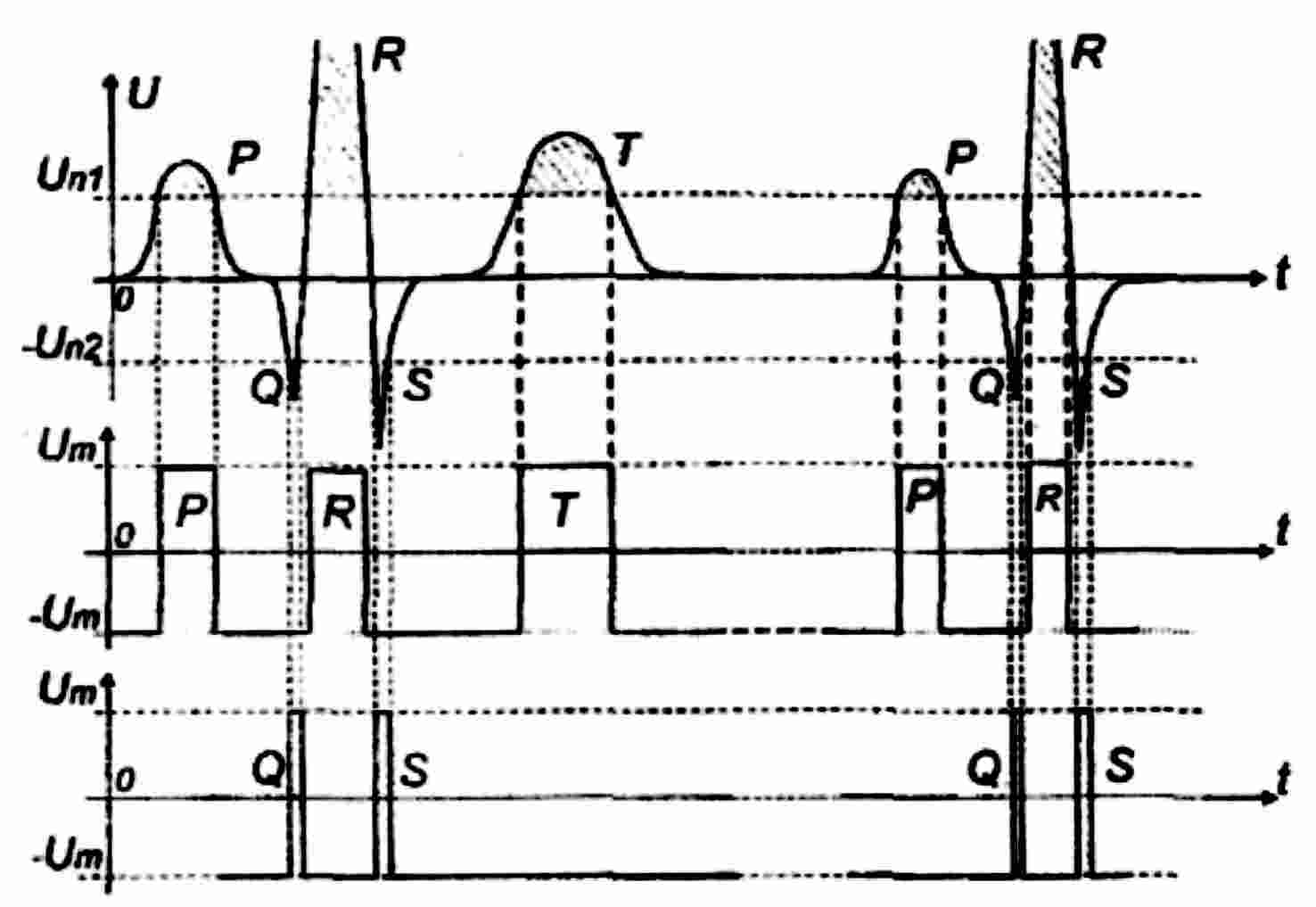
Рисунок 2.3 - Формування імпульсів положення зубців ЕКГ.
Принципова схема такого пристрою показана на рис. 2.4.
Два компаратори схеми DA1.1 і DA1.2 порівнюють напругу U із граничною напругою, величина яких задається дільниками Rl, R2 і R3, R4. Логічні елементи DD1 та DD2 застосовані для формування імпульсів положення зубців у прямій і інверсній формах.
Сигнали з виходів двох каналів порівняння надходять на елемент D3 логічного підсумовування, утворюючи послідовність імпульсів різної тривалості у вигляді сумарної напруги uq.
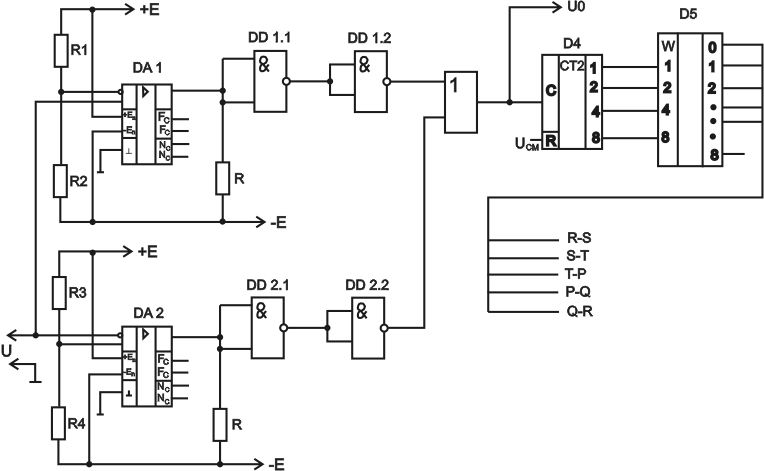
Рисунок 2.4 - Схема формування імпульсів положення зубців ЕКГ
Для поділу цих імпульсів у часі здійснюється їхній підрахунок щодо імпульсів синхронізації uch із присвоєнням номера їхнього положення на інтервалі тривалості періоду серцевих скорочень. Для цього застосований лічильник D4 і дешифратор D5. Лічильник D4 установлюється в нульове положення по входу R кожним імпульсом синхронізації uch на початку дії зубця R. При цьому на виході дешифратора D5 утвориться послідовність прямокутних імпульсів, тривалості яких дорівнюють інтервалам часу між передніми фронтами імпульсів зубців R S Т Р Q. Таким чином виділяються інтервали часу R-S, S-T, T-P, P-Q, Q-R.
Для виділення імпульсів положення й вимірювання зубців R S Т Р Q і необхідних інтервалів можна застосовувати додаткові логічні схеми збігів. На рис. 2.5 та 2.6 показана схема виділення та форма вимірювальних імпульсів інтервалу зубця Р й інтервалу P-Q (R).
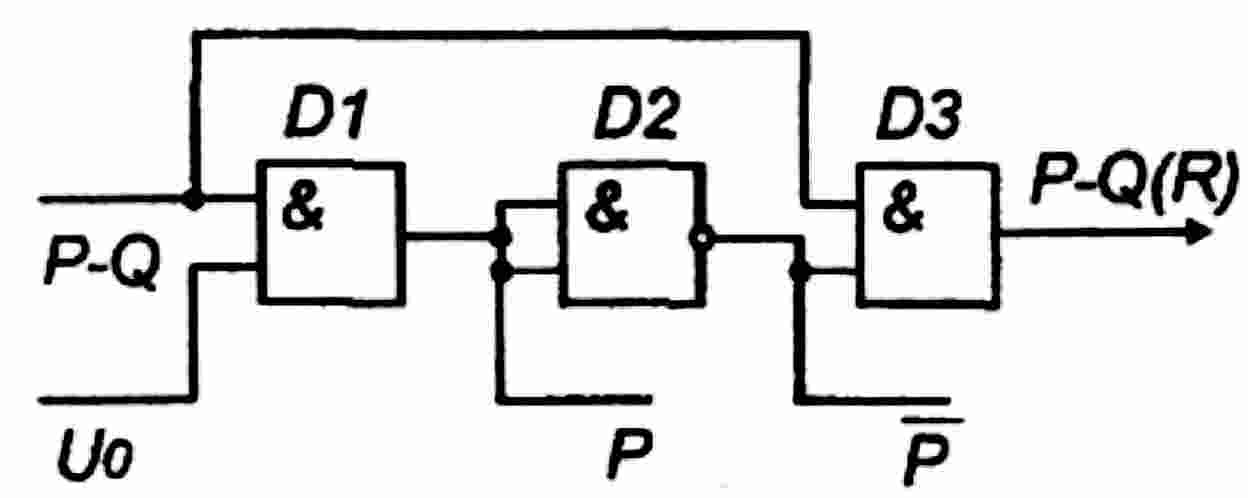
Рисунок 2.5 - Схема виділення зубця Р и сегмента P-Q (R) з інтервалу P-Q
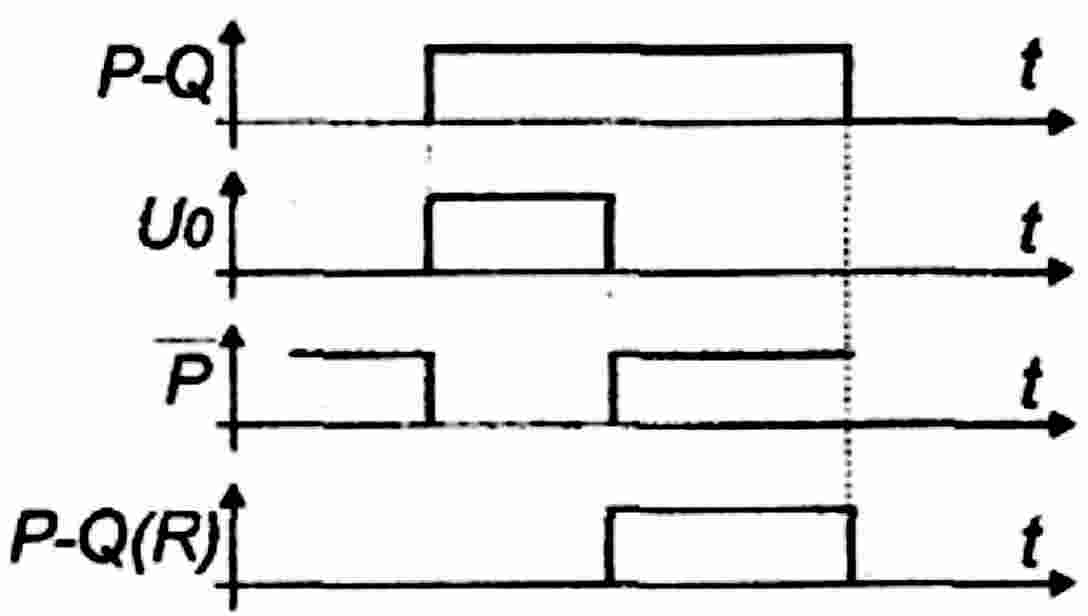
Рисунок 2.6 – Форма вимірюваних імпульсів зубця Р и сегмента P-Q (R) з інтервалу P-Q
Сформовані імпульси керують роботою схем пристрою з роздільним виміром параметрів зубців R S Т Р Q. Імпульси інтервалів P-Q з виходу дешифратора збігаються з імпульсами сумарної напруги U0 тільки на інтервалах дії зубця Р. При цьому на виході схеми D1 виділяються із загального сигналу U0 імпульси виміру зубця Р, а на виході схеми D3 - імпульси інтервалу P-Q (R).
Згідно з завданням для побудови схема формування імпульсів положення зубців ЕКГ обираємо мікросхеми серії К155:
компаратори DA1.1 і DA1.2 – К155СП1;
логічні елементи DD1 та DD2 - К155ЛЕ2;
елемент логічного підсумовування D3 –К155 ИМ3;
лічильник D4 - К155ИЕ7;
дешифратор D5 - К155ИД3.
3 РОЗРАХУНОК ФУНКЦІОНАЛЬНИХ ВУЗЛІВ ЕЛЕКТРОКАРДІОМЕТРА
Завдання (варіант №2):
відносна похибка вимірювання γ = 1%;
верхня частота смуги пропускання fв = 200 Гц;
максимальна напруга Um = 2,5 В;
напруга на вході ОП U1 = 2 мВ;
середня напруга перешкод σп = 150 мкВ;
серія ІМС: КМ155;
l = 3;
логічна функція φ2 + φ3 + φ4
3.1 Розрахунок АЦІІ
Розрахуємо число розрядів n цифрового кода АЦП.
Число розрядів n цифрового кода АЦП з урахуванням шумів визначаємо за формулами
![]() ;
;
![]() / ln2;
/ ln2;
![]() ;
;
![]() ,
,![]() ,
,
де n – число розрядів цифрового кода; KU – коефіцієнт підсилення за напругою; σR, σш, σп – середньоквадратичні значення відповідно шумів вхідних резисторів, шума та перешкод на операційному підсилювачі ОП, ρ – густина шумів резисторів.
![]() .
.
Для металоплівкових резисторів групи А
ρ
= (4…5)·10-6
В-1;
![]() В;
В;
Для сучасних малошумлячих ОП
ρ=(3…5)·10-9 В/Гц; σш = ρ ·fВ = 4·10-9 · 200 = 8·10-7 В.
Приймаємо σп = 5·10-5 В. Тоді:
![]() В.
В.
Приймаємо nш = 5.
За умовою заданої точності вимірювання:
 .
.
Приймаємо nm = 7.
Оскільки nш < nm,, то вибір числа розрядів за умовою точності призведе до того, що 2 молодші розряди на дисплеї будуть змінюватися випадково, тобто точність вимірювання буде знижено. Тому застосуємо АЦП з подвійним інтегруванням, яке прдушує перешкоди.
З урахуванням коефіцієнта придушення шумів Кп = 5…10:
 .
.
Приймаємо число розрядів цифрового кода АЦП n = 8.
Виходячи з необхідної кількості розрядів, обираємо восьмирозрядний АЦП – швидкодіючу велику інтегральну мікросхему К1107ПВ4 (рис. 3.1).
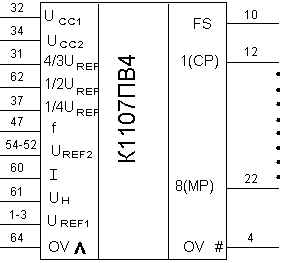
1–3 – опорна напруга UREF1; 4 – загальний (цифрова земля); 10 – цифровий вихід 9, розряд переповнення; 12, 13, 15, 16, 19, 19, 21, 22 – цифрові виходи з 1 (СР) по 8 (МР); 31 – вивід коректування нелінійності 0,75UREF; 32 – напруга джерела живлення UCC1; 34 – напруга джерела живлення UCC2; 37 – вивід коректування нелінійності 0,25UREF; 47 – вхід тактового сигналу; 52–54 – опорна напруга UREF1; 60 – аналоговий вхід; 61 – вивід напруги контролю гістерезису UH; 62 – вивід коректування нелінійності 0,5UREF; 64 – загальний (аналогова земля); 5–9, 11, 14, 17, 20, 23–30, 35, 86, 38–46, 48-51, 55-59, 63 незадіяні виводи.
Рисунок 3.1 – Мікросхема К1107ПВ4
Мікросхема К1107ПВ4 забезпечує норми на основні електричні параметри при подачі напруги живлення UCC1 = 5 В ± 5 %; UCC2 = -5,2 В ± 5 % та опорних напругах UREF1 = 2,5 В; UREF2 = -2,5 В.
3.2 Розробка загальних параметрів багатоканального цифрового кардіографа
3.2.1. Визначимо число дискретних вибірок m за одну секунду при цифровому перетворенні сигналу кардіограми по одному відведенню:
m = 1,6 ·fв = 1,6 · 200 = 320.
Виберемо fn кратну 50 Гц (50, 150, 200…):
fп = m ≈ 400 Гц.
3.2.2. Визначимо число точок Кт цифрового перетворювача ЕКГ, що доводяться на один короткий зубець, з тривалістю τ3 = 0,05 сек.
Кт = fn · τ3 = 400 · 0,05 = 20.
Таким чином, короткий зубець передається 20 точками, що досить для його аналізу.
3.2.3. Визначимо ціну і величину часового інтервалу Тп на ЕКГ між виконуваними перетвореннями на одному відведенні:
Тп = 1/ fn = 1/400 = 2,5·10-3 с.
3.2.4. Обчислимо частоту fn задаючого генератора при числі відведень l =3:
FГ = l ·fп = 3 · 400 = 1200 Гц.
При цьому період сигналу задаючого генератора Тг знижується із зростанням числа відведень і складає:
ТГ = 1/ FГ = 1/1200 = 8,33·10-4 с.
3.2.5. Оцінимо час τпер, необхідний для виконання цифрового перетворення в одній точці ЕКГ:
τпер = τАЦП + τОЗП + τЛС ,
де τАЦП = 100 нс - час перетворення схемою АЦП, τОЗП = 300нс - час звернення до ОЗП, τЛС - час перетворення логічною схемою.
Час перетворення логічного елементу складе:
τЛС = NЛС · τ1Л,
де NЛС - число ІМС логіки; τ1Л - час затримки сигналу на одній схемі.
Для ІМС серії К155 τ1Л = 15…20 нс.
Приймаємо: NЛС = 20.. .30 й τ1Л = 20 нс, тоді отримаємо:
τЛС = 20 · 20 = 400 нс.
Таким чином, час перетворення в одній точці ЕКГ складає:
τпер = (100 + 300 + 400)10-9 = 8·10-7 с.
3.2.6. Максимальне число вибірок NВ цифрового перетворення за одну секунду або максимальна частота fпм перетворення складає:
NВ = fпм = 1/τпер = 1/8·10-7 = 1,25·106 Гц = 1,25 МГц.
3.2.7. Максимальна частота перетворення по одному відведенню при l = 3:
NВ1 = fпм1 = NВ /3 = 416,67 кГц.
Розрахована частота перетворення по одному відведенню набагато більше за обрану в п.п. 3.2.1 частоту перетворення fп = 400 Гц, тобто швидкодія елементів є високою і не обмежує побудову схеми кардіометра.
3.3 Розрахунок кількості ІМС в ОЗП
В п. 3.1 було знайдено кількість розрядів кода n = 8, а в п.п. 3.2.1 – частота перетворення по одному відведенню fп = 400 Гц. Знайдемо ТАН - час запису або аналізу ЕКГ. Відомо, що тривалість інтервалу R-R ЕКГ τRR = 0,4…1,5 с. Тоді:
ТАН = 3τRR = 3·1 = 3 с.
Визначимо кількість N1 цифрових n-розрядних слів, які потрібно записати в ОЗП по одному відведенню, тобто кількість рядків:
N1 = fп· ТАН = 400·3 = 1200 Гц.
Для запису ЕКГ кількох пацієнтів Кп = (3…4):
N1п =Кп· N1 = 3·1200 = 3600 Гц.
При цьому по одному відведенню знадобиться організація пам’яті типу N1п · n з загальним об’ємом Ф1:
Ф1 = N1п · n = 3600·8 = 28800 біт.
Вибираємо ІМС пам’яті згідно з завданням з серії К155: ОЗП К155РУ7, яка є ОЗП на 1024 біт (1024 слів на 1 розряд).Загальний об’єм пам’яті по усім l відведенням:
Ф = Ф1 · l = 28800·3 = 86400 біт.
Визначаємо кількість корпусів ІМС:
![]()
і приймаємо кількість корпусів 85.
З цього результату випливає, що задана (варіант №2) серія ІМС К155 для розробленого кардіометра не оптимальна. Якщо вибрати ІМС К132РУ6А/Б, яка є ОЗП на 16 кбіт (16000 слів на 1 розряд), то потрібна кількість корпусів ІМС:
![]()
і приймаємо кількість корпусів 6.