

лекции, учебные пособия / учебное пособие компьютерные лабораторные работы по динамике. мельников в. г., иванов с.е., мельников г. и. / pri_meh_method_complabrabpodin
.pdfРис. 2.2. Маятник двухстепенной системы
Мощность пар сил вязкого трения в подшипниках колес
M11тр щ11 =−3k4ω112 cos(щ11,щ11) =−3k4ω112
где принято во внимание, что момент M11тр направлен перпендикулярно плоскости рисунка, а щ11 “от нас”.
В выражении (2.3) для мощности Pм(1) следует учитывать, что маятник зафиксирован поэтому угол между силами G21, G22 и скоростями точек их приложения vG21, vG22 остается постоянным и равным π / 2 . Во
всех механических системах мощность сил и моментов вязкого трения отрицательна, т.е. PMтр ≤0, PFтр ≤0 .
Кинематическое состояние механизма V =[v, x], при котором его
обобщенные скорости и обобщенные координаты имеют положительные значения [v > 0, x > 0] , соответствует положительному фазовому вектору V и называется положительной фазой. На рис. 2.2. представлен механизм, находящийся в положительной фазе. В общем случае в процессе движения элементы фазового вектора могут принимать как положительные, так и отрицательные значения, но расчетные формулы получены для положительной фазы.
Обобщенная сила одностепенной системы находится по формуле
Q |
(1) |
= P |
(1) |
/ v, при |
& |
(2.4) |
|
|
v = x |
41
1.2. Механизм с двумя степенями свободы
1.2.1. Описание двухстепенного механизма
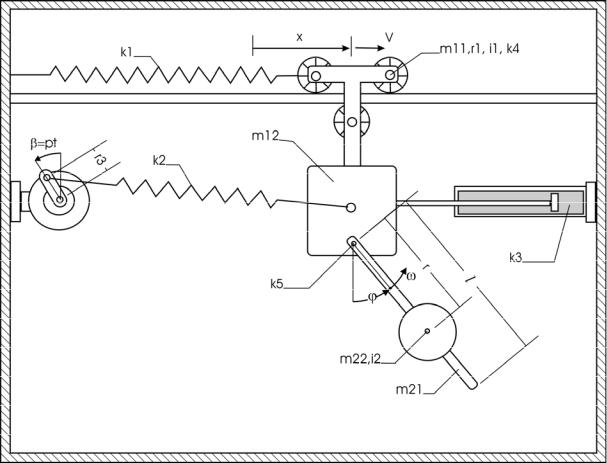
Механическая система с отклоненным маятником, совершающая угловые колебательные движения на подвижной платформе (рис.2.3.) состоит из поступательно движущейся со скоростью v платформы на которой вращается тела вокруг осей. В таком случае механизм имеет две степени свободы, представляет собой голономную стационарную двухстепенную механическую систему. Положение такой системы фиксируется двумя обобщенными координатами q1,q2 , в качестве которых
примем направленную линейную координату x и направленную против часовой стрелки угловую координату ϕ . Быстрота движения характеризуется двумя соответствующими обобщенными скоростями q&1 = v, q&2 =ω.
Фазовый вектор состояния двухстепенной системы содержит четыре фазовые координаты характеризующие быстроту и конфигурацию объекта
в инерциальной системе |
отсчета в |
произвольный |
момент времени |
V =[x,ϕ, x,ϕ]=[v,ω, x,ϕ]. |
На рисунке |
целесообразно |
изобразить при |
& & |
|
|
|
выводе расчетных формул положительную фазу движения, а затем – фазу в соответствии с заданием.
Мощность системы приложенных сил состоит из мощности сил на поступательном движении и мощности моментов сил взятых относительно осей вращения на угловых скоростях относительного вращения. Две обобщенные силы находятся путем приведения подобных членов в мощности, выделения коэффициентов при v,ω. При этом зависимости сил
и моментов от v,ω следует раскрывать лишь после выполнения группировки членов. Кинетическая энергия системы равна кинетической энергии поступательного движения вместе с поступательной системой отсчета сложенной с кинетической энергией вращения звеньев вокруг своих осей и дополнительных членов для неуравновешенных звеньев, в данном случае для маятника.
42
F1 |
3M4 |
|
< |
||
|
< |
M5 |
< |
|
||
F2 |
|
F3 |
Рис. 2.3. Механизм с двумя степенями свободы
1.2.2. Мощность и обобщенные силы
В качестве двух обобщенных координат механической системы выберем направленную вправо линейную координату x платформы и направленную против часовой стрелки угловую координату ϕ маятника.
Соответствующие |
две обобщенные |
скорости системы: v = x , ω =ϕ. |
||||||||
|
|
|
|
|
|
|
|
|
& |
& |
Фазовый |
вектор V |
двухстепенной |
системы содержит четыре |
фазовые |
||||||
координаты: V =[v,ω, x,ϕ]. Орт |
|
|
оси Oz и вектор угловой скорости |
|||||||
k |
||||||||||
маятника |
щ=ϕ k , направленный перпендикулярно плоскости рисунка на |
|||||||||
|
|
|
& |
|
|
|
|
|
|
|
нас.
Силы тяжести всех звеньев на поступательном движении не имеют мощностей ввиду их перпендикулярности к скорости v , поэтому их опускаем в формулах, имеет мощность (отрицательную) только сила сопротивления демпфера F3 и две упругие силы F1,F2 . На вращательном относительном движении имеют мощность моменты сил тяжести неуравновешенного маятника M21,M22 и моменты трения в подшипниках 3M4,M5 , направленные противоположно угловым скоростям и поэтому имеют отрицательные мощности.
Получаем выражения мощностей всей системы сил и пар сил, приложенных к устройству, показанному на рисунке.
43

P = (F1 + F2 + F3 ) v +3M4 ω1 + (M5 + M21 + M22 ) ω
или, выражая скалярные произведения через произведения проекций сомножителей:
P = (F1X + F2 X + F3 X )v −3M4v / r1 + (−M5 + M21 + M22 )ω
где M4 , M5 - модули моментов трения, M21, M22 - моменты сил тяжести маятника относительно оси О, отрицательные для показанного на рис.2.3
состояния. |
|
Приводя подобные члены с вынесением общих множителей, получаем |
|
P = v(−3M4 / r1 + F1X + F2 X + F3 X ) +ω(−M5 + M21 + M22 ) |
(2.5) |
Коэффициенты в мощности при обобщенных скоростях называются обобщенными силами. Получаем обобщенные силы по обобщенной скорости v и по угловой скорости ω:
Q1 = −3M4 / r1 + F1X + F2 X + F3 X
Q2 = −M5 + M21 + M22
На данном этапе можно раскрывать функциональную зависимость обобщенных сил от фазовых координат и времени.
Окончательно получаем выражение
Q1 = (−3k4 |
/ r1 |
+ k3 )v −(k1 |
+ k2 )x − k2r3 sin( pt) |
(2.6) |
|
Q2 = −k5ω |
−(m21l / 2 + m22r)g sin(ϕ) |
||||
|
|||||
Расчетная формула мощности системы приложенных сил в произвольной фазе движения, в произвольный момент времени:
P =Q1 v +Q2ω |
(2.7) |
где функции Q1 ,Q2 определяется формулой (2.6)
Замечание. Пусть к физическому маятнику дополнительно приложен
некоторый крутящий момент M kp , создаваемый дополнительным двигателем, расположенным на платформе около оси О. Тогда, очевидно, этот момент войдет в виде слагаемого в формулу (2.6).
Линеаризацией выражений называется приближение (аппроксимация) нелинейных функций от фазовых координат на малом интервале изменения этих координат. В данном случае, предполагается, что при малых колебаниях маятника, например в пределах −π / 10 ≤ϕ ≤π / 10 можно в формуле (2.6) положить sin(ϕ) =ϕ , т.е. спрямить нелинейную
функцию в окрестности 0. |
|
|
Получим линеаризованное выражение |
|
|
Q2 = −k5ω − Mϕ, |
(2.8) |
|
M = (m21l / 2 + m22r)g |
||
|
Выражение для первой обобщенной силы есть линейная функция относительно фазовых переменных v, x , поэтому остается неизменным. Очевидно, что коэффициент М равен модулю момента сил тяжести маятника при его отклонении от вертикали на угол π / 2.
44
2. Порядок выполнения работы.
1.1.В соответствии с номером варианта и таблицы 2.1. ввести значения параметров и начальные условия одностепенной механической системы. В окне «Настройки» задать режим «одностепенная» Произвести моделирование движения механизма, получить графики x(t), v(t) , F(t) .
1.2.По графикам v(t) , x(t), определить численное значение фазового вектора V =[v, x] одностепенной системы для заданного момента
времени t1 . Изобразить механизм в состоянии, соответствующем
значению фазового вектора.
1.3.Вычислить мощности внешних сил приложенных к платформе:
P3G11 , PF1 , PMтр , PG12 , PFтр , |
PF . Найти мощность Pпл(1) . |
||
1.4.Вычислить мощности сил, приложенных к маятнику: PG 21 , PG 22 , и |
|||
мощность Pм |
системы сил. |
|
|
1 |
|
|
|
1.5.Вычислить |
мощность |
P(1) |
системы сил, приложенной к |
одностепенной системе |
|
Q(1) одностепенного механизма |
|
1.6.Найти обобщенную |
силу |
||
Q(1) = P(1) / v. |
|
|
|
3.Содержание отчёта
Вотчёт о проделанной лабораторной работе должны быть включены следующие разделы:
1.Номер варианта и исходные данные для расчёта.
2.Графики x(t), v(t) , F(t) , одностепенной системы, численное
значение фазового вектора V =[v, x] для заданного момента
времени t1 . Изобразить механизм в состоянии, соответствующем значению фазового вектора.
3. Мощности внешних сил приложенных к платформе: P3G11 , PF1 ,
PMтр , PG12 , PFтр , PF и Pпл(1) .
4.Мощности сил, приложенных к маятнику: PG 21 , PG 22 , и мощность P1м системы сил.
5.Мощность P(1) системы сил, приложенной к одностепенной системе и обобщенная сила Q(1) одностепенного механизма
6.Графики x(t), ϕ(t), v(t) ,ω(t) , F(t) двухстепенной системы.
7.Фазовый вектор двухстепенной системы V =[v,ω, x,ϕ] для
заданного момента времени t1 . Изобразить механизм в состоянии, соответствующем значению двухстепенного фазового вектора.
45
8. Мощности системы сил Pм(2) , Pпл(2) и мощность системы сил, приложенной к двухстепенной системе.
9.Две обобщенные силы Q1(2) и Q2(2)
4.Исходные данные для выполнения лабораторной работы.
Таблица 2.1.
№ |
ϕ(0) |
x(0) |
r |
i2 |
t (c) |
вар. |
рад |
|
|
|
|
1 |
0.1 |
0 |
6 |
0.7 |
0.8 |
2 |
0.1 |
0 |
6 |
0.7 |
2.6 |
3 |
0.2 |
0 |
6 |
0.3 |
2.5 |
4 |
0.2 |
0 |
6 |
0.3 |
1.7 |
5 |
-0.5 |
0.5 |
5 |
0.1 |
0.3 |
6 |
-0.5 |
0.5 |
5 |
0.1 |
1.5 |
7 |
0 |
0 |
2 |
0.1 |
2 |
8 |
0 |
0 |
2 |
0.1 |
4.8 |
9 |
0 |
0 |
2 |
0.1 |
3.3 |
10 |
0.1 |
0 |
2 |
0.1 |
1.2 |
11 |
0.1 |
0 |
2 |
0.1 |
2.1 |
12 |
0.1 |
0 |
2 |
0.1 |
0.2 |
13 |
-0.1 |
0.1 |
1 |
0.4 |
2.1 |
14 |
-0.1 |
0.1 |
1 |
0.4 |
0.8 |
15 |
0.1 |
0.3 |
1 |
0,2 |
0,3 |
16 |
0.1 |
0.3 |
1 |
0,2 |
0,7 |
17 |
0.1 |
0.3 |
1 |
0,2 |
1,2 |
18 |
0.2 |
0.2 |
5 |
0.2 |
0.6 |
19 |
0.2 |
0.2 |
5 |
0.2 |
2.3 |
20 |
0.2 |
0.2 |
5 |
0.2 |
3.5 |
21 |
0.3 |
0.1 |
5 |
0.3 |
0,7 |
22 |
0.3 |
0.1 |
5 |
0.3 |
2.5 |
23 |
0.3 |
0.1 |
5 |
0.3 |
3,4 |
24 |
-0.2 |
-0,1 |
1 |
0.2 |
2 |
25 |
-0.2 |
-0,1 |
1 |
0.2 |
1 |
26 |
-0.2 |
-0,1 |
1 |
0.2 |
2,7 |
27 |
-0.2 |
-0,1 |
1 |
0.2 |
2,4 |
46

ЛАБОРАТОРНАЯ РАБОТА №3
СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ ЛИНЕЙНОЙ И НЕЛИНЕЙНОЙ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
В работе исследуются свободные затухающие колебания системы с одной степенью свободы на примере колебаний физического маятника. Определяется частота собственных колебаний, логарифмический декремент колебаний, коэффициент вязкого трения и коэффициент демпфирования. Оценивается влияние на период колебаний погрешности линеаризации уравнений, выполненной двумя способами. Линейными колебаниями называют повторяющиеся движения, подчиненные линейным дифференциальным уравнениям, нелинейными – в том случае если ОДУ содержат хотя бы один нелинейный член относительно переменных состояния. Переход от нелинейной математической модели к линейной обычно осуществляется линеаризацией нелинейных параметров.
Цель работы
Экспериментальное определение периода собственных колебаний и определение логарифмического декремента колебаний. Оценка погрешности линеаризации.
1. Описание установки.
Рис. 3.1 Лабораторная установка
47

Физическим маятником называют любое неуравновешенное твердое тело, подвешенное на неподвижной оси.
Подвижная часть устройства (рис.3.1) в режиме одной, вращательной степени свободы является физическим маятником. На рис. 3.2. представлен физический маятник с неподвижной горизонтальной осью. Данный физический маятник состоит из однородного тонкого стержня длины l , массой m21 на котором закреплен диск массой m22 , имеющий
центральный радиус инерции i2 . Маятник вращается вокруг
горизонтальной оси Oz под действием приложенных сил тяжести в условиях трения в подшипнике.
Рис. 3.2 Физический маятник
Показаны веса стержня и груза, момент трения в подшипнике и скорости центров масс, угол поворота и угловая скорость маятника в его “положительном” состоянии системы вида [ω > 0,ϕ > 0].
2. Математическая модель
Выберем в качестве обобщенной координаты и обобщенной скорости механической системы угол поворота ϕ и угловую скорость ω =ϕ& маятника. Фазовым вектором механизма, характеризующим его кинематическое состояние, является двухэлементный вектор-строка [ω,ϕ].
Получим кинетическую энергию и обобщенную силу данной одностепенной системы в фазовых переменных ω, ϕ .
48

Кинетическая энергия T системы состоит из кинетической энергии маятника и кинетической энергии груза. Она приводится к виду T = 12 a22ω2
, посредством вынесения общего множителя ω2 / 2 , где полученный коэффициент a22 называется приведенный коэффициент инерции
механизма
a22 |
= |
1 m21l2 |
+ m22 (i22 + r2 ) |
(3.1) |
|
|
3 |
|
|
Коэффициент (3.1) называется также приведенным моментом инерции маятника. В данном случае a22 есть момент инерции физического
маятника относительно оси подвеса Oz , состоящего из двух тел. Обобщенная сила Q , определяется как частное от деления мощности
P системы сил на угловую скорость, Q = P /ω , и представляет собой в
данном случае главный момент системы приложенных сил. Мощность системы сил состоит из мощностей сил тяжести и мощности момента пары сил трения:
P = (M21 + M22 + Mтр) щ или P = −((m21gl / 2 + m22 gr)sin(ϕ) −Mтр ) щ (3.2)
Либо мощность можно вычислить через мощность моментов сил:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
P = (M |
21 + M |
22 + M5 ) ω |
|
|
|||||||||||
Обобщенная |
сила |
|
маятника |
|
|
по |
угловой |
скорости |
|||||||||
Q = P / ω = −g(m21l / 2 + m22r)sin(ϕ) − |
|
тр . |
|
|
|
|
|
||||||||||
M |
|
|
|
|
|
||||||||||||
Уравнение Лагранжа для угловой обобщенной координаты ϕ |
|
||||||||||||||||
|
|
|
d |
∂T |
∂T |
−Q = 0 |
|
|
|||||||||
|
|
|
|
|
|
|
− |
∂ϕ |
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
dt |
∂ω |
|
|
|
|
|
||||||||
После выполнения указанных в нем вычислений над кинетической энергией принимает форму дифференциального уравнения второго порядка
|
1 ∂a22 |
2 |
|
|
&& |
|
|
ω −Q = 0 |
(3.3) |
|
|
|||
a22ϕ + |
2 ∂ϕ |
|||
|
|
|
||
к которому присоединяют заданные начальные условия |
|
|||
ω(0) =ω0 , |
ϕ(0) =ϕ0 , |
(3.4) |
||
где начальное состояние механической системы [ω0 , ϕ0 ] должно быть
задано.
Для рассматриваемой механической системы ∂a22 / ∂ϕ = 0 , в виду того, что a22 = const и уравнение (3.3) имеет вид
&& |
|
−1 |
(3.5) |
ϕ −bQ = 0, при b = a22 |
|||
где коэффициент b – обратный момент инерции устройства. |
|||
Таким образом угловое ускорение |
ϕ |
маятника |
пропорционально |
|
&& |
|
|
обобщенной силы, в качестве которой и имеем главный момент приложенных сил.
49

Математическая модель механической системы (3.5)-(3.4) является нелинейной, ввиду нелинейной зависимости обобщенной силы Q от угла
поворота. Считаем, что эта модель является точной, она точно описывает движение маятника при больших и малых колебаниях, но при малых колебаниях функцию Q =Q2 будем определять по формуле (2.8).
При колебаниях с малой амплитудой удовлетворяющих, например
ограничению |
|ϕ |<π / 6 , |
нелинейную функцию |
Q(ϕ) |
можно |
линеаризовать, |
полагая |
sinϕ ≈ϕ допуская при |
этом |
небольшую |
погрешность. Получаем обобщенную силу линейной структуры |
(3.6) |
|||
|
Q ≈ −Mϕ −k5ϕ, при |ϕ |<π / 6 |
|
||
|
|
& |
|
|
при M = m22 gr + m21gl / 2
Подставим линейную функцию (3.6)относительно фазовых переменных [ϕ&, ϕ] в уравнение и введем новые обозначения
коэффициентов. Получим линейное однородное дифференциальное уравнение второго порядка с постоянными коэффициентами вида
&& |
& |
2 |
(3.7) |
ϕ |
+ 2nϕ + k0ϕ = 0 |
||
с обозначениями коэффициентов |
|
|
|
n =bk5 / 2, |
k0 = bM |
(3.8) |
|
Дифференциальное уравнение (3.7)-(3.8) вместе с начальными условиями (3.4) представляет собой математическую модель линейных колебаний маятника, называемую задачей Коши. Параметр n называется
коэффициентом затухания, параметр k0 - собственной циклической частотой незатухающих колебаний без трения. Наряду с параметром k0
будем рассматривать также параметр k вида
k = k02 − n2 , |
(3.9) |
называемый собственной циклической частотой затухающих колебаний.
В уравнении (3.7) слагаемое 2nϕ& обусловлено наличием в механизме
сил |
вязкого |
трения. |
|
Очевидно, что |
|
k < k0 , |
при малом значении |
|||||
коэффициента демпфирования n имеем k ≈ k0 . |
|
|
||||||||||
|
Решение задачи Коши (3.7), (3.4) записывается в форме |
|||||||||||
кинематического уравнения |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
ϕ = A e−nt cos(kt −α) |
, |
(3.10) |
||||
где |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A0 = |
2 |
1 |
(ω0 + nϕ0 ) |
2 |
|
ϕ |
|
|
|
= ±1 = sgn (ω0 + nϕ0 ) |
(3.11) |
|
ϕ0 + |
|
|
|
, α = μarccos |
|
0 |
, |
μ |
||||
k |
2 |
|
|
|||||||||
|
|
|
|
|
|
A |
|
|
|
|||
В случае, когда начальное состояние удовлетворяет условию |
|
ω0 + nϕ0 = 0 решение имеет вид |
|
ϕ =ϕ0e−nt cos kt, |
(3.12) |
Из выражения (3.10) следует, что система совершает гармонические колебания с затухающей амплитудой A = A0 e−nt , с начальной фазой α , с
50